

IEEE Robotics and Automation Letters (IEEE Xplore: https://ieeexplore.ieee.org/document/10214157)
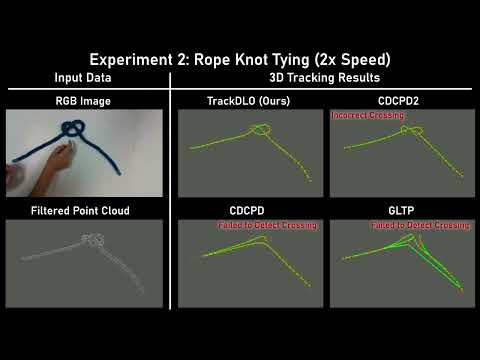
This repository contains the TrackDLO Robot Operating System (ROS) package. The TrackDLO ROS package is an implementation of our paper, TrackDLO: Tracking Deformable Linear Objects Under Occlusion with Motion Coherence, by Jingyi Xiang, Holly Dinkel, Harry Zhao, Naixiang Gao, Brian Coltin, Trey Smith, and Timothy Bretl. The TrackDLO algorithm is implemented in C++.


The requirements and run instructions page provides information on package installation and usage.
The supplementary video showcases experiments and failure cases.
The supplemental documentation contains details about the initialization process and parameter tuning.
@ARTICLE{
xiang2023trackdlo,
author={Xiang, Jingyi and Dinkel, Holly and Zhao, Harry and Gao, Naixiang and Coltin, Brian and Smith, Trey and Bretl, Timothy},
journal={IEEE Robotics and Automation Letters},
title={TrackDLO: Tracking Deformable Linear Objects Under Occlusion With Motion Coherence},
year={2023},
volume={8},
number={10},
pages={6179-6186},
doi={10.1109/LRA.2023.3303710}
}