Home
[...]
This library was developed to get a simple, but fast image analysis tool on weak systems. Primarily, it was used as blob detector on a Beagleboard with Kinect sensor (see KinectGrid repository). Now, the interfaces was improved to use the library on a Raspberry Pi + Camera.
The library contains two different algorithms which differs in the topological interpretation of gray scale images.
- The 'threshtree algorithm' splits the image with a thresh value and create a tree of blobs by nesting white and black areas.
- The 'depthtree algorithm' distinct the (depth) values into N levels and nesting by the level. Thus, two areas will be identified as same area if they are connected by other areas with levels >= N.
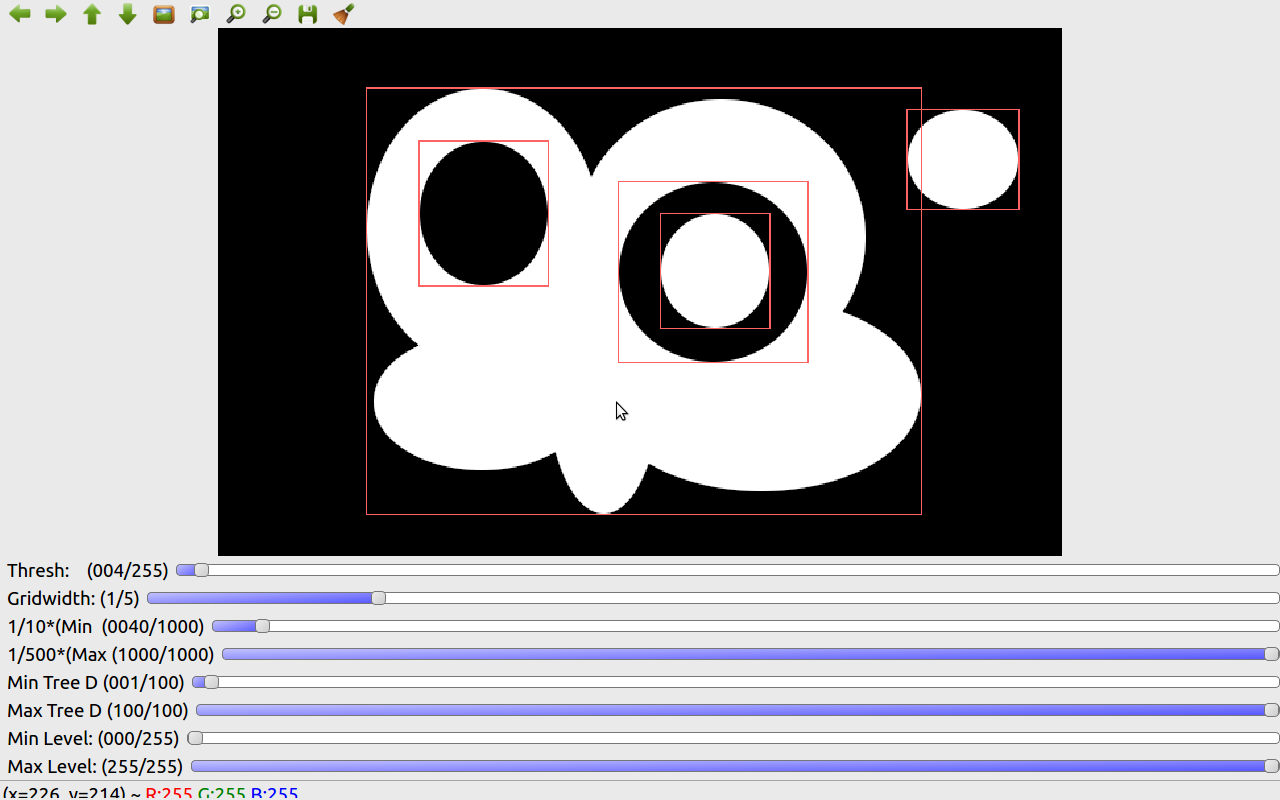
Input Image
1st variant: The node for the inner white cycle is a parent of the inner black area.
2nd variant: The node for the inner white cycle is a direct child of the background node.
=========== The depthtree algorithm is more complex, but provides many information with a single run. The tree structure of the result can be used to find all blobs, which fulfill some conditions and return a pixel mask for this blobs. Filtering is just cheap post processing and it's not necessary to rerun the whole algorithm.
Gray scale representation of the source image
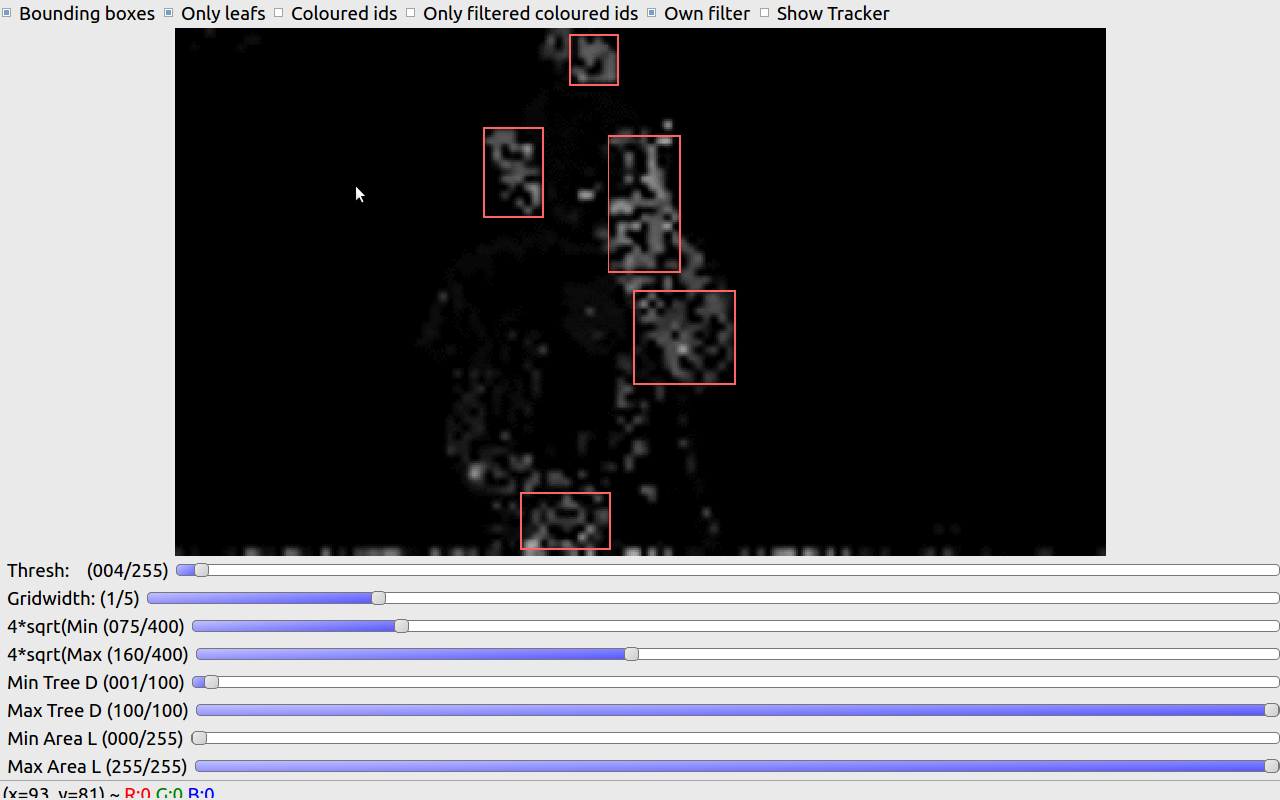
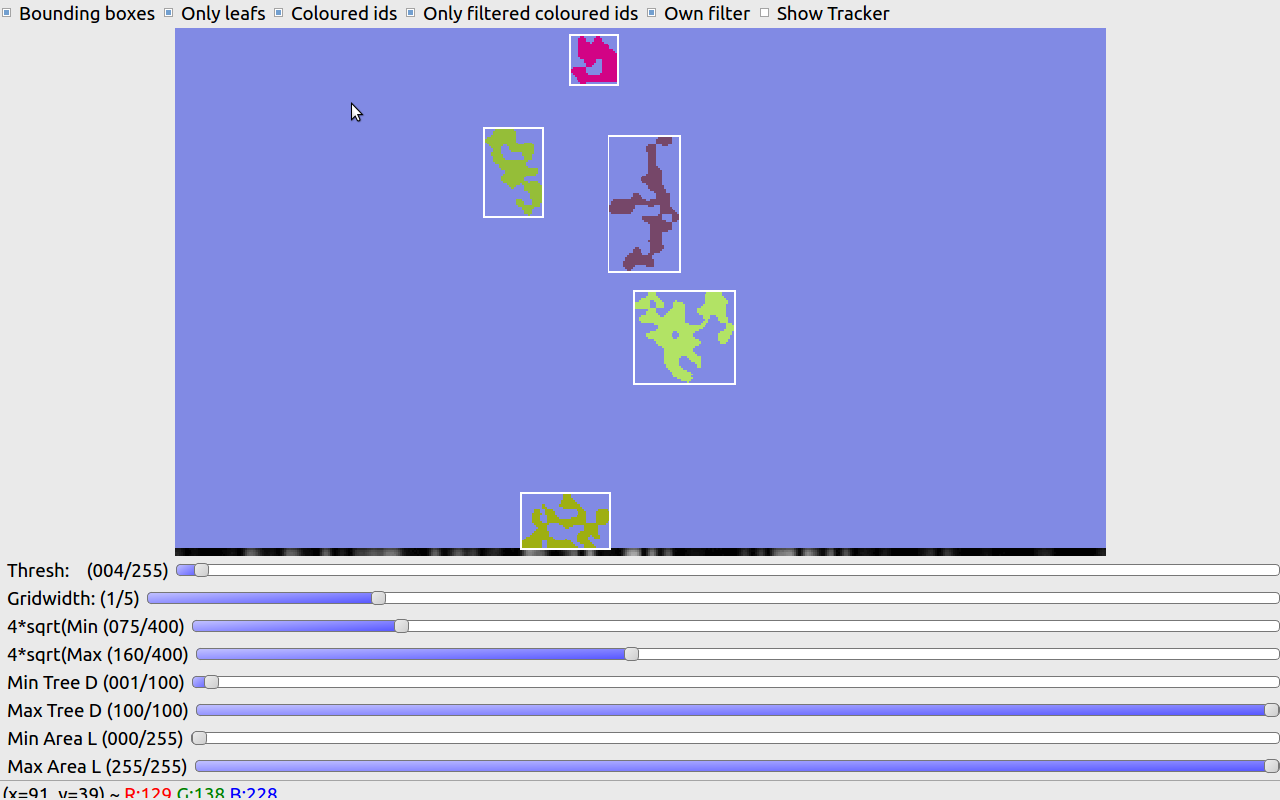
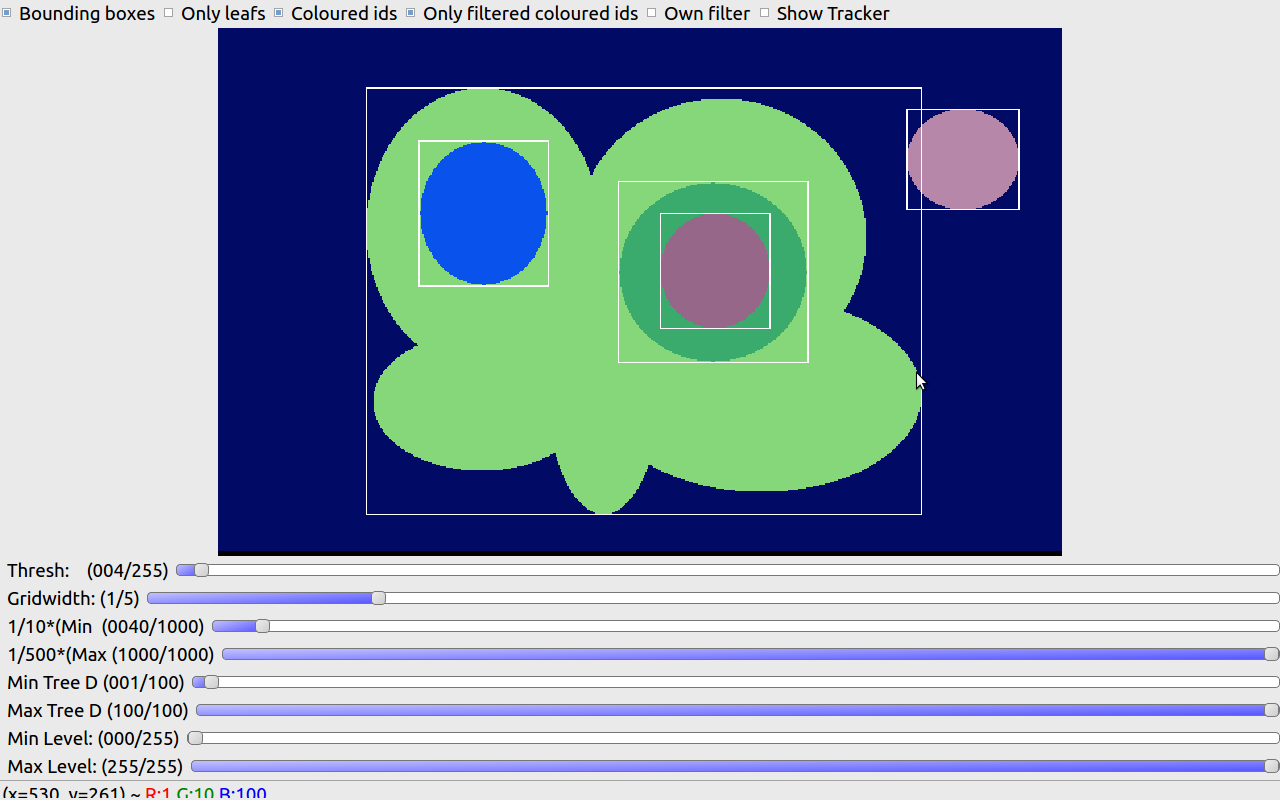
Display of all areas ids:

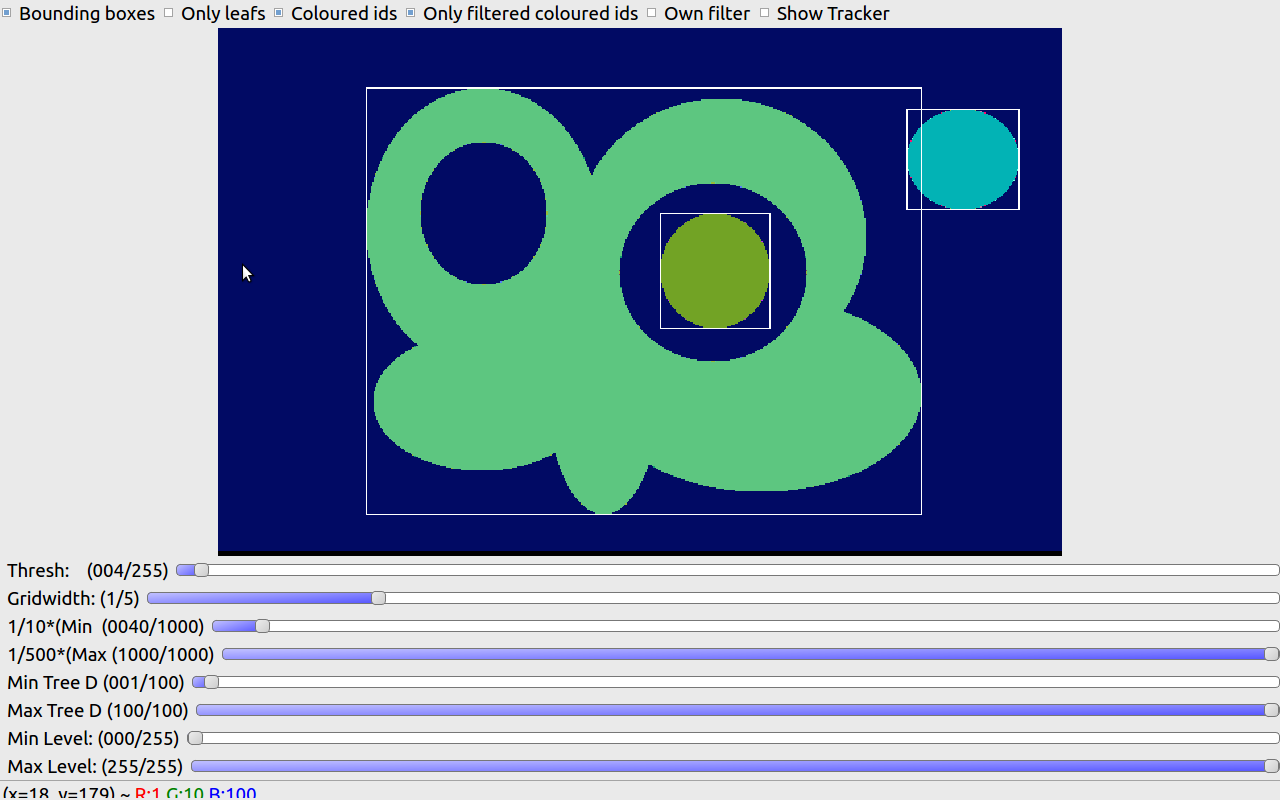
Display of area mask for filtered nodes: