This repository is dedicated to the firmware for the Altruist Civil Station with support for SDS011, DHT22, BMP180, BMP/E 280, and other sensors. It is a fork of the airRohr Sensor Firmware. We have added several new features, including a noise meter, a Geiger counter, and a VOC sensor. Additionally, integration with Robonomics has been added to turn sensors into a full-fledged distributed sensor network.
More information can be found in the guides on Robonomics Academy.
- Many environmental and air quality sensors can be used concurrently
- Integration with Sensor.Community (formerly Luftdaten.Info)
- Configuration via HTTP in local WiFi or with the sensor as an access point
- Support for OLED and LCD displays (SSD1306, SH1106, LCD1602, and LCD2004)
- A wide selection of API integrations for measurement reporting
- Compatible with ESP8266 (NodeMCU v2/v3 and compatible) and ESP32 (experimental)
You can find more information about acquiring the sensor in the Sensor Hardware guide on Robonomics Academy.
Detailed information about sensor setup can be found in the Setting up and connecting sensors article.
If a (previously) configured WiFi is not reachable within 20 seconds after power-on, the firmware switches into AP mode and creates a WiFi network in the form RobonomicsSensor-[Sensor-ID].
This WiFi network is by default unencrypted. When a client connects to it, they will be redirected to the sensor's web server http://192.168.4.1/, which allows initial configuration.
Configurable options include:
- WiFi Access Point to use
- Measurement options (sensors to poll, intervals, etc.)
- APIs to send the measurements
The unencrypted Access Point for initial configuration will turn itself off after about 10 minutes. To reactivate it, please power cycle the board.
To build the firmware, you need the Platformio tool. In this article, we'll provide instructions on how to build the firmware with Platformio core.
Clone the repo:
git clone https://github.com/airalab/sensors-software.git
cd sensors-softwareBuild the firmware:
pio run -e nodemcuv2_enThe firmware binary file will be in the builds folder.
To flash the device, connect it to the computer with a USB cable and run:
pio run -t upload -e nodemcuv2_enTo add your Connectivity Robonomics Server to the sensors firmware, fork this repository and edit the robonomics_servers.h file. Add your server to the list in the following format:
{"<server_address>", <Region>}Use one of the following variables for the region:
INTL_REGION_GLOBAL - Global Servers
INTL_REGION_EU - Europe
INTL_REGION_AS - Asia
INTL_REGION_AF - Africa
INTL_REGION_AU - Australia
INTL_REGION_NA - North America
INTL_REGION_SA - South America
For example:
{"connectivity.robonomics.network", INTL_REGION_GLOBAL}
Then make a pull request.
The DHT22 sensor is originally an indoor sensor. For outdoor use, it appears to be rather sensitive to water condensation after reaching 100% relative humidity, which can cause it to stay at a 99.9% value for a very long time (sometimes indefinitely). Additionally, it appears to be sensitive to high UV light, which can cause the sensor to crash until it is hard power-cycled.
Better experiences have been reported with a BME280 or SHT3x sensor, so consider using those instead.
Connecting or powering via a computer USB will provide a USB serial connection with the settings 115200 baud. By default, the sensor will provide human-readable debug information of configurable granularity through this connection.
All measurements can also be read as CSV via USB-Serial when using the USB port with the settings 9600 Baud 8N1. To avoid interference from debug options (see earlier section), set debug to "None" in the configuration.
Please refer to the Pinout of NodeMCU v2 and v3 for much more detailed information about the individual pin functions.
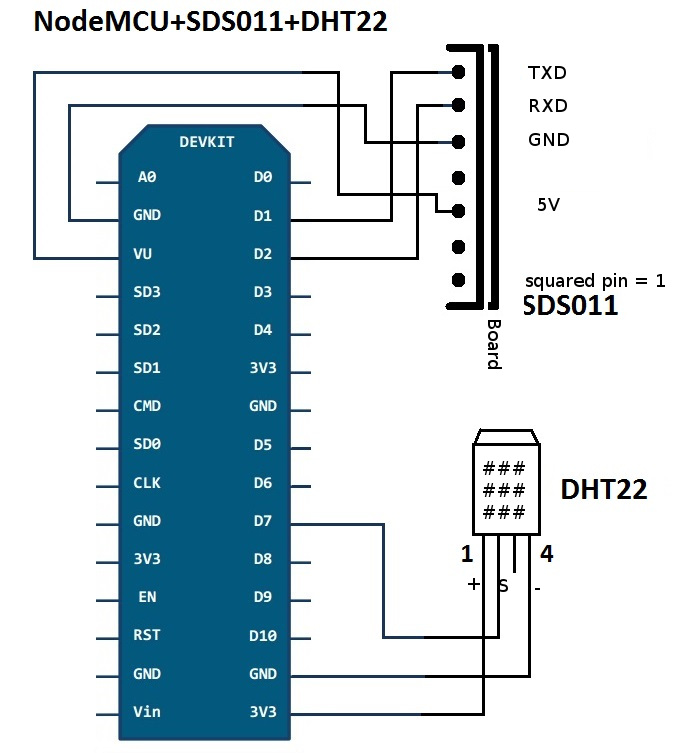
Note: Serial connections are always crossed (RX on one side is connected with TX on the other side).
- Pin 1 (TX) -> (RX) Pin D1 (GPIO5)
- Pin 2 (RX) -> (TX) Pin D2 (GPIO4)
- Pin 3 (GND) -> GND
- Pin 4 (2.5m) -> unused
- Pin 5 (5V) -> VU
- Pin 6 (1m) -> unused
- Pin 1 => 3V3
- Pin 2 => Pin D7 (GPIO13)
- Pin 3 => unused
- Pin 4 => GND
Please check your version (pinout) at [https://datasheets.maximintegrated.com/en/ds/DS18B20.pdf].
The DS18B20 uses the same PIN D7 as the DHT22, so only one of them (DHT22 or DS18B20) can be used at a time.
- GND -> Pin GND
- DQ -> Pin D7 (GPIO 13)
- VCC -> Pin 3V3 or Pin VU
Pinout: 8 7 6 5 4 3 2 1
- Pin 1 (VCC) -> VU
- Pin 2 (GND) -> GND
- Pin 3 (SET) -> unused
- Pin 4 (RX) -> Pin D2 (GPIO4)
- Pin 5 (TX) -> Pin D1 (GPIO5)
- Pin 6 (RESET) -> unused
- Pin 7 (NC) -> unused
- Pin 8 (NC) -> unused
Pinout PMS7003: 9 7 5 3 1 10 8 6 4 2
- Pin 1/2 (VCC) -> VU
- Pin 3/4 (GND) -> GND
- Pin 5 (RESET) -> unused
- Pin 6 (NC) -> unused
- Pin 7 (RX) -> Pin D2 (GPIO4)
- Pin 8 (NC) -> unused
- Pin 9 (TX) -> Pin D1 (GPIO5)
- Pin 10 (SET) -> unused
Pinout: 8 7 6 5 4 3 2 1
- Pin 1 (3.3V) -> unused
- Pin 2 (5V) -> VU
- Pin 3 (NC) -> unused
- Pin 4 (NC) -> unused
- Pin 5 TEST) -> unused
- Pin 6 (TX) -> Pin D1 (GPIO5)
- Pin 7 (RX) -> Pin D2 (GPIO4)
- Pin 8 (GND) -> GND
- VCC -> Pin 3V3
- GND -> Pin GND
- SCL -> Pin D4 (GPIO2)
- SDA -> Pin D3 (GPIO0)
Pinout: 1 2 3 4 5
- Pin 1 (5V) -> Pin VU/VIN
- Pin 2 (SDA) -> Pin D3 (GPIO0)
- Pin 3 (SCL) -> Pin D4 (GPIO2)
- Pin 4 (SEL) -> Pin GND
- Pin 5 (GND) -> Pin GND
- VCC -> Pin VU
- GND -> Pin GND
- SCL -> Pin D4 (GPIO2)
- SDA -> Pin D3 (GPIO0)
- VCC -> Pin VU
- GND -> Pin GND
- SCL -> Pin D4 (GPIO2)
- SDA -> Pin D3 (GPIO0)
Warning: USE AT YOUR OWN RISK. In combination with the PM sensor, the firmware may crash!!!
VCC and GND can be provided by the board (use 3.3V only).
Note: Serial connections are always crossed (RX on one side is connected with TX on the other side).
- TX von Neo -> Pin D5 (RX)
- RX von Neo -> Pin D6 (TX)