Error while calibrating camera-lidar #130
Comments
|
I have the same problem, do you solve it now? Thanks |
|
No,not yet. |
|
I have the same problem. I built the packages required. And launched the point grey camera and VLP 16 Lidar. However, I haven't really created the setup for now and I ran the find_transform.launch file and I'm having this issue. Can you let me know what result is expected if we connect everything without the setup and launch the file? |
|
@ankitdhall, I have encountered the same issue. in find_velodyne_points.cpp (the extra couts added just to double check where I am) config_file.txt: command line output: |
|
@miriamrebekah thanks for the detailed log. I am not actively maintaining this repo; could you create a merge request that solves this issue that you encounter? |
|
I met the issue when I use the rslidar-32, do you solve it? Many thanks. |
|
. change the num from 16 to 32. It will be work. |
Great work @ankitdhall and team!
I tried using this implementation with velodyne-32C and Zed camera.This is my setup-
I have changed the topic names in the config file ,the marker coordinates ,and uncommented aruco-mapping in launch file.
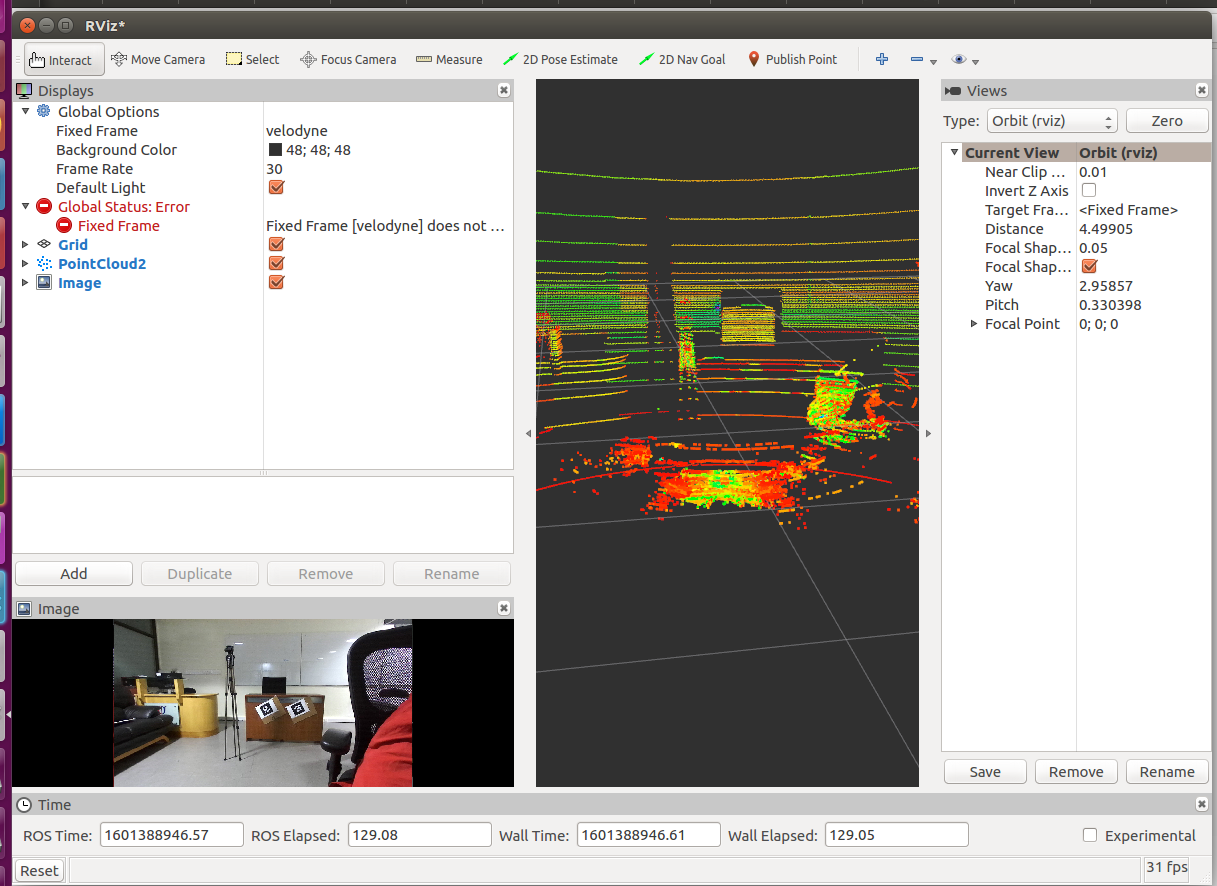
I am using live sensor feed from lidar and camera,and when I played in rviz,it displays both the image and point cloud properly.(shown below)
This indicates that there is time sync between camera and lidar.
But eachtime I run the command -
roslaunch lidar_camera_calibration find_transform.launchI get the following error

Only Mono8 window displays,the lidar (pointcloud window) is not displayed.
I checked the topics getting published, the lidar_camera_calibration_rt is getting published but when I echo it gives the output as - are your messages being built?
My question is when ever I run the command why does the process die and throw that error as shown in the picture and the lidar window also does not diaplay.
I checked out similar issues but I was unable to get a solution.
Any suggestion is greatly appreciated.
The text was updated successfully, but these errors were encountered: