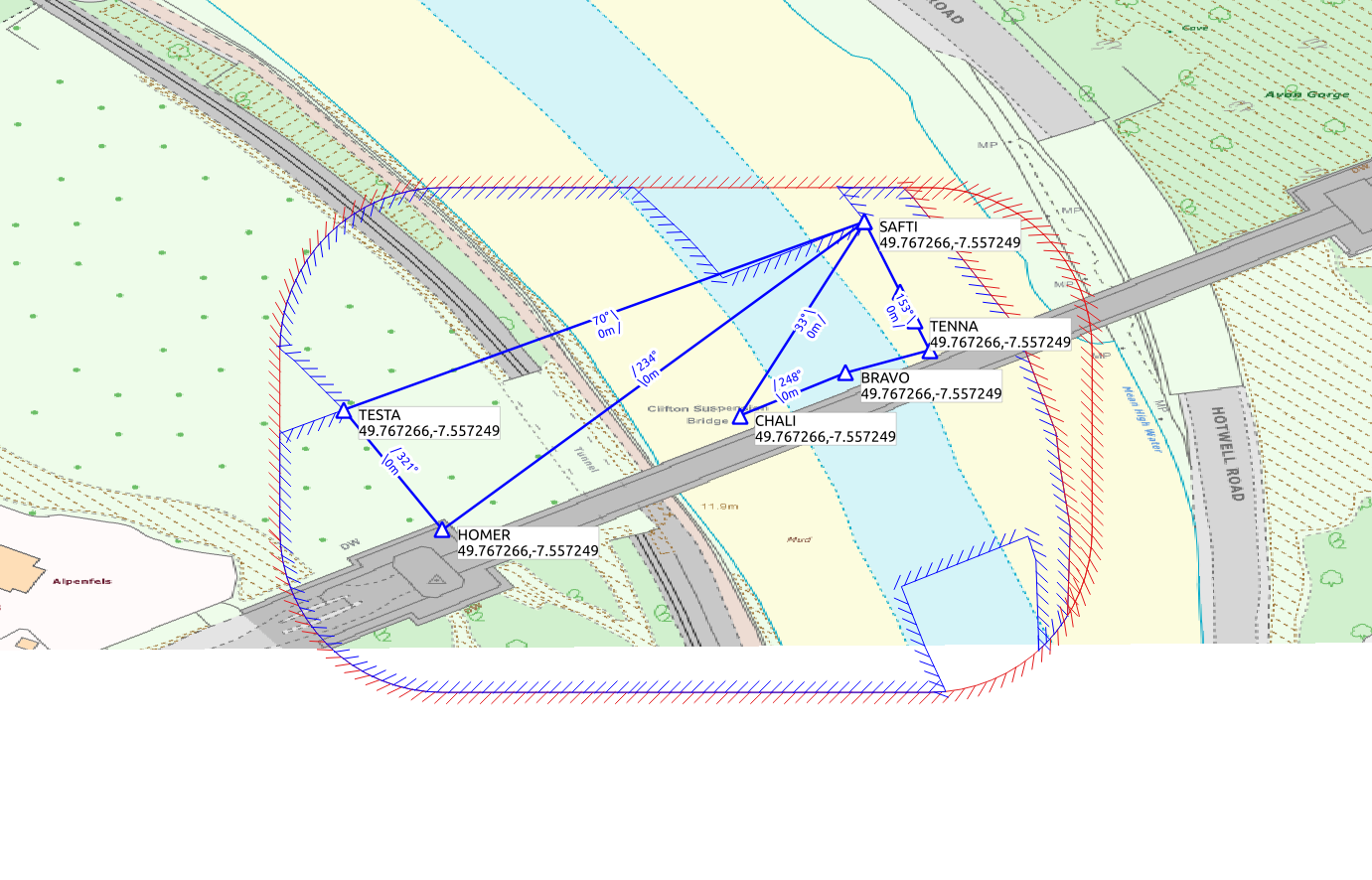
UAV mission planning using GIS maps to identify hazards, no fly zones, safety locations and control zones.
Underlying principles described in:
H. Goudarzi, D. Hine and A. Richards, "Mission Automation for Drone Inspection in Congested Environments," 2019 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED UAS), Cranfield, United Kingdom, 2019, pp. 305-314.
DOI: 10.1109/REDUAS47371.2019.8999719
This release uses open source data from openstreetmap. Data from Ordnance Survey Digimap can also be used, with appropriate coordinate transformations.
The bristol_example_osm notebook works through the example, including installation instructions for Python dependencies.
The example does not imply permission to fly in the locations shown. While the software is intended to promote safe drone flight, use of this software does not in itself guarantee safe or legal drone operation. Follow the drone code.