A software stack containing tools to interface LEGO Mindstorms with ROS.
Maintainer:
David Butterworth
Last updated Jan 2016
Original authors:
Tully Foote, Wim Meeussen, and Melonee Wise
Willow Garage, 2010
.
There are multiple versions of NXT-ROS:
-
ROS Indigo
catkin
coming soon -
ROS Groovy
rosbuild
Dependencies: Python 2.x, NXT-Python 2.2.2
Source: https://github.com/dbworth/NXT-ROS/tree/groovy/ -
ROS Fuerte
rosbuild
Dependencies: Python 2.x, NXT-Python 2.2.2
Source: https://github.com/dbworth/NXT-ROS/tree/fuerte/
There is also an earlier version
that uses NXT-Python v1.2.0:
Source: https://github.com/dbworth/NXT-ROS/tree/ROS_Fuerte_NXT-Python-v1.2.0/ -
ROS Electric
rosbuild
The original release, it is no longer maintained.
Dependencies: Python 2.x, NXT-Python v1.1.2
Source: http://stack-nxt.foote-ros-pkg.googlecode.com/hg (Mercurial)
Source: http://stack-nxt-robots.foote-ros-pkg.googlecode.com/hg/ (Mercurial)
Source: http://stack-nxt-apps.foote-ros-pkg.googlecode.com/hg/ (Mercurial)
.
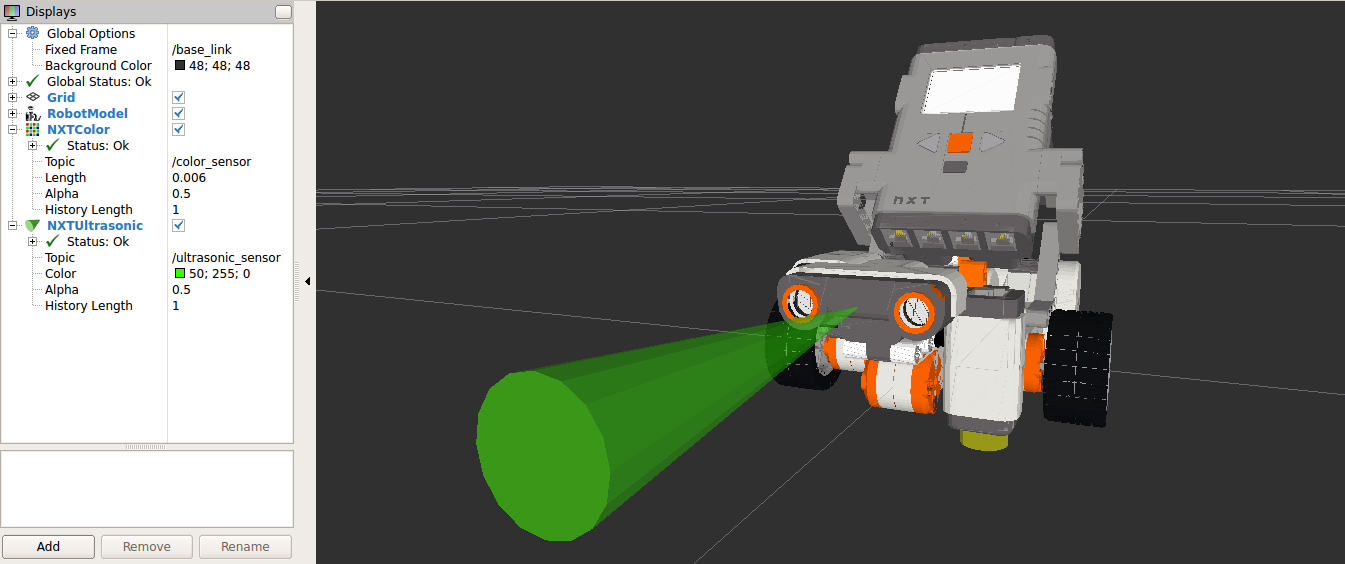
Screenshots:
nxt_rviz_plugin in ROS Groovy, displaying data from the ultrasonic and color sensors:
nxt_rviz_plugin in ROS Groovy, showing an obstacle costmap generated from the ultrasonic sensor data:
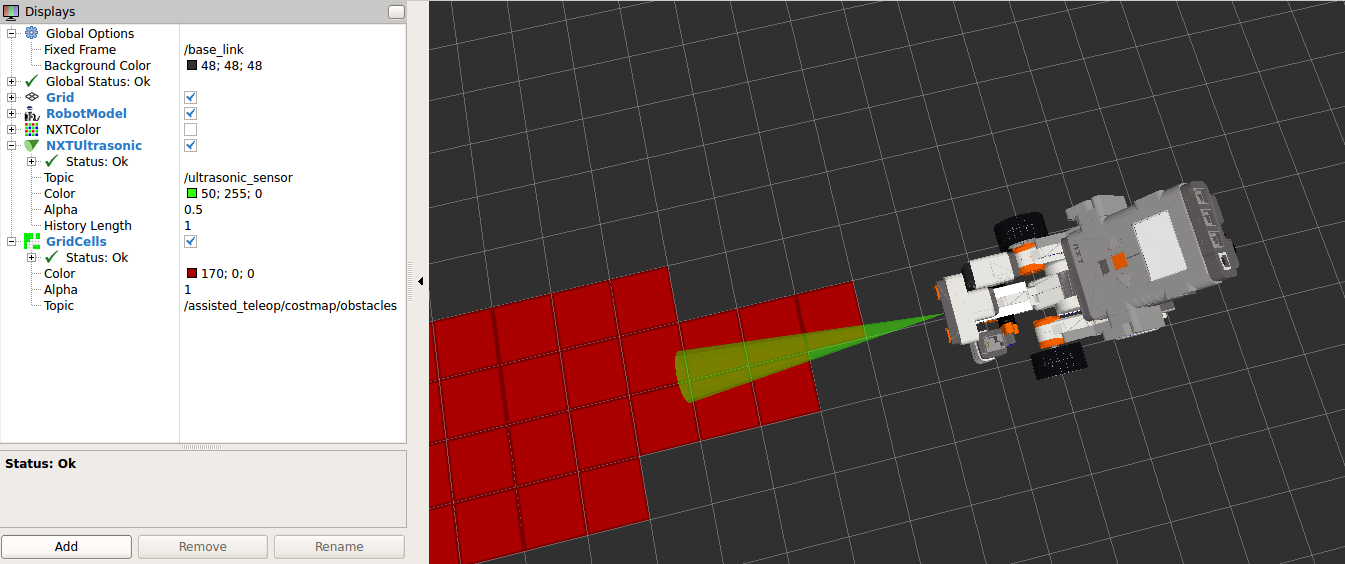
=================