ROS packages used in our final year project robot. Fully tested on an SBC with Ubuntu 16.04LTS and ROS Kinetic.
The two-wheeled self-balancing Personal Mobility Vehicle capable of manual, tele-op and autonomous navigation.

CAD design.

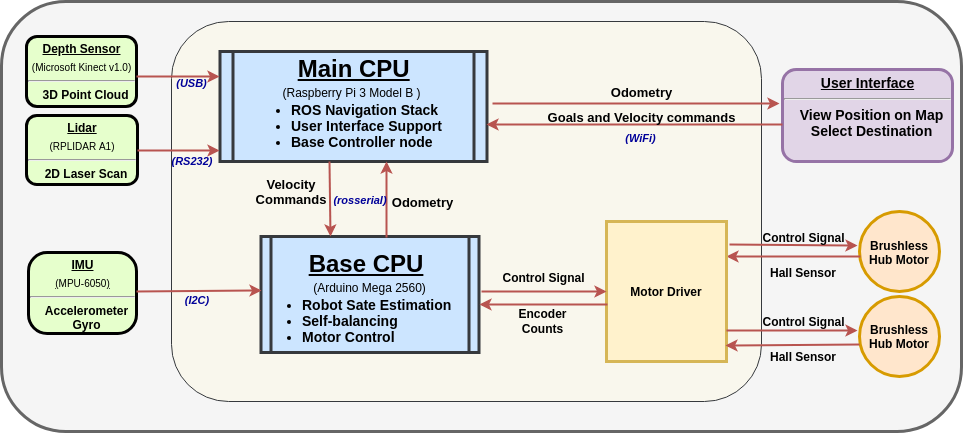
Block diagram.
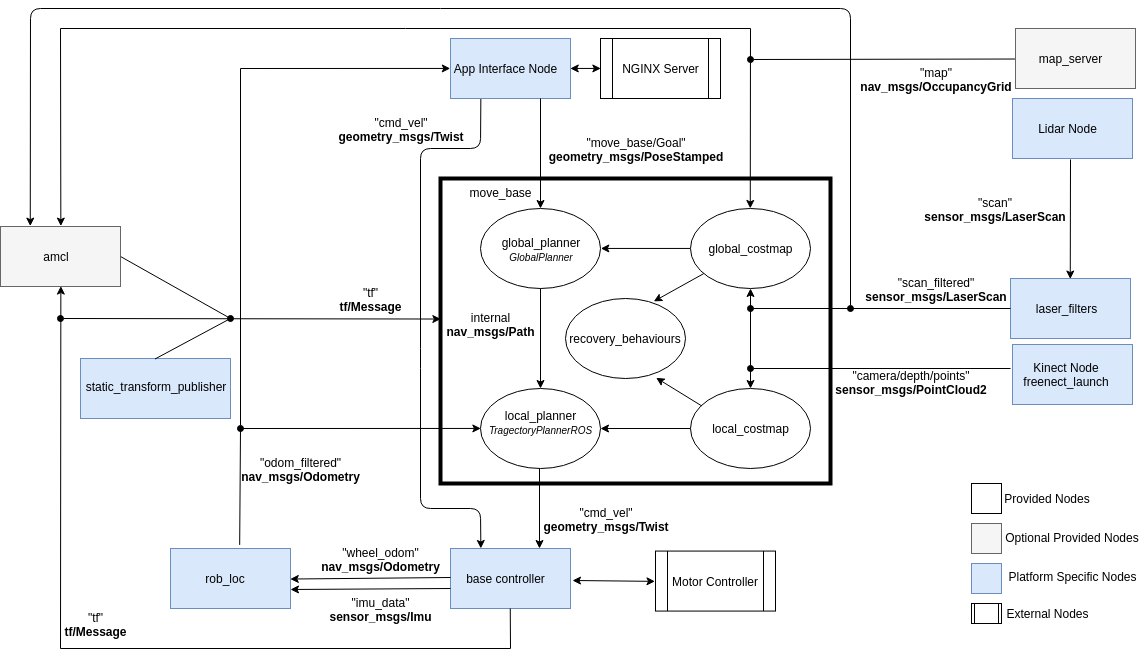
Modifications to the typical ROS navigation stack.
To launch base_controller, rosserial and odometry filter:
roslaunch rob_loc robot_localization.launch
To launch interface with the android app:
roslaunch app_interface app_interface.launch
To launch the lidar, Kinect, amcl and move_base with pre-built map:
roslaunch nav_stack move_base.launch