Wiring Diagram? #20
Comments
|
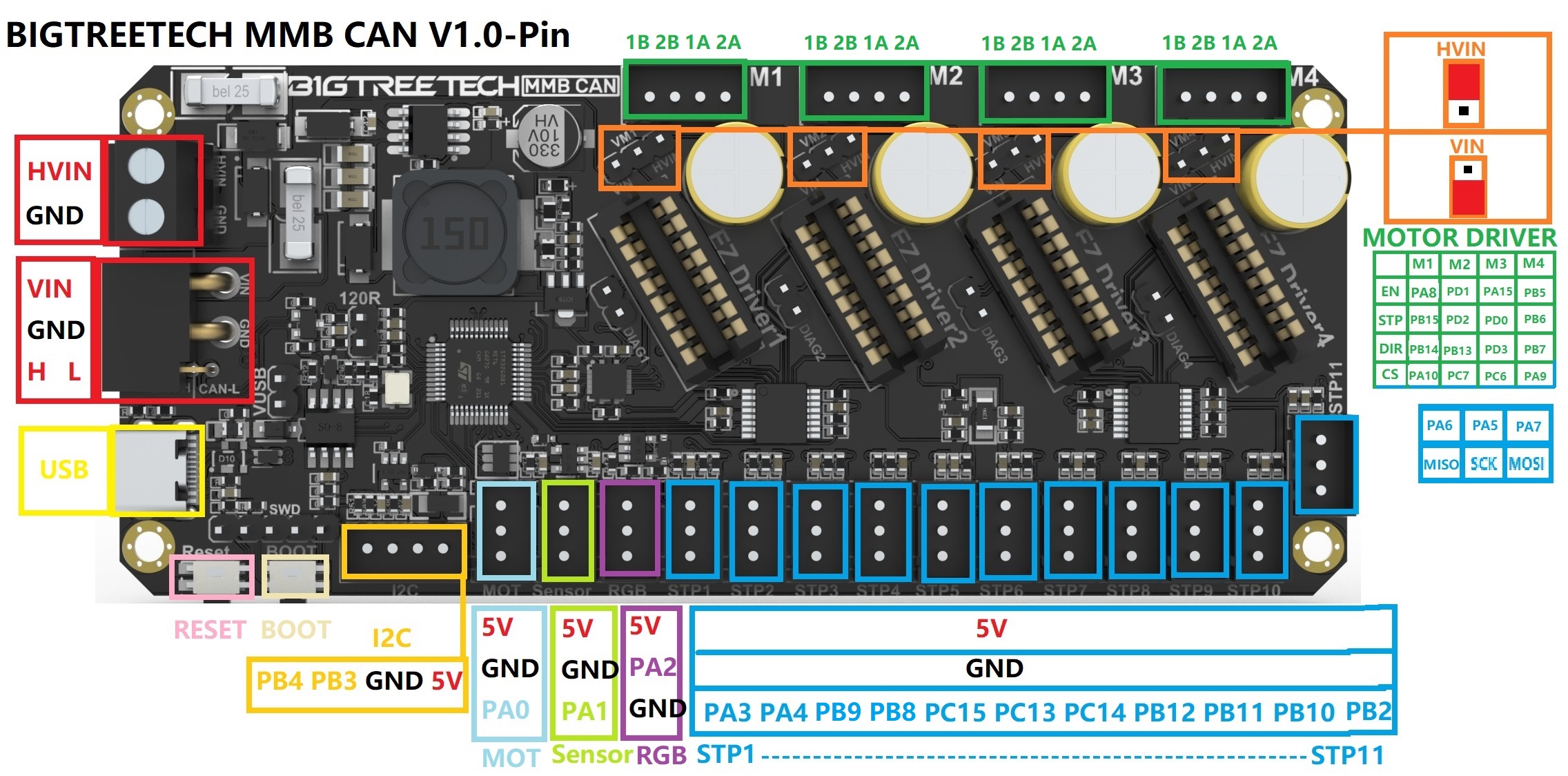
Noted! Working on it What board are you using? In case you are using the BTT MBB, I would just follow the ERCFV2 manual and use at the end a free pin of STPx . According to our testers the board has plenty enough power to supply the cutter servo. |
Yes, I'm using the BTT MBB. Does that mean I don't need this buck converter thingy I bought? |
|
Some people are using the BTT MBB 5V supply without any problem but I would recommend using still a buck converter for now at least, I will try to contact BTT and hear their thoughts on this topic. So connect it like this Servo Data Pin -> Some free STPx pin |
|
Yeah, I figured that I'd screw that up so I bought a buck converter that outputs 5v. https://www.amazon.com/dp/B01NALDSJ0?ref=ppx_yo2ov_dt_b_product_details&th=1 I don't trust myself with "If you set this dial incorrectly you destroy expensive things" |
|
Speaking of the buck converter, do you have a recommended place to put it? I was thinking about modifying the housing of the ERCFv2 BTT MBB to be a bit thicker so I could mount the converter to the inside of it. But maybe printing it it's own housing and then gluing it to the outside would be better. |
|
agree |
|
Sorry guys for the long waiting, Beta7 is way more work than expected :p |
|
Thanks for the super quick update! At the beginning my servo didn't move at all, so I spent some time to investigate using multimeter, signal generator, oscilloscope and have some finding.
we can see in below screenshot, some STPX pin has tooo low signal level, only 2.6V, and the servo doesn't accept and not working at all. all stop pins are directly connected to stm32 GPIOs. |


|
Thanks a lot for your analyses, |

|
Has anyone been successful in using the Easy BRD? If so do you have a diagram handy? I cannot for the life of me get the servo gear to rotate through the PA7 data/signal pin |
I used the extra connector to connect the servo and got the lower from an external 12/24 to 5v converter.
My wiring is a bit of a mess, but it works |

Thank you!
|

{kind=link}
|
I'm currently not at home, so if it's fine I will get back to you on Sunday/Monday when I'm home again. I'm not sure what my config was again 😅 |
Just checking in if you ever had a chance to look? I still cannot get mine to work! Crazy. |
|
@f00d4tehg0dz sorry I forgot, here's my config: my wiring is as in the Picture. Maybe your servo is bad, try using the selector serve (or a different known good servo), if that dosn't work on this pin with the right config then maybe you have tow bad boards. Otherwise could you send a picture of your board where the servo is pluged in, just in case something is wrong there. any maybe a sanity check if your using the right wires. Oh and have you checked if your 12v/24v to 5v converter is good? Sorry if I'm saying stuff that is obvious here, but i just want to make sure nothing is missed. |
It's funny you mentioned that. I recently bought a new 12v to 5v converter with a display, but I couldn't get it to work correctly. It turns out I had my In/Out reversed. After correcting the issue, the motor is spinning when entering the cutting commands. Thanks so much for the sanity check here! |
Hey guys.
I'm looking at the documentation and I can't tell where exactly I'm supposed to plug what in to what. If you could put together a couple of sentences or a diagram of how to attach the electronics of this to the rest of the ECRFv2 system (or point me at the documentation I didn't see), I would greatly appreciate it.
Thanks!
The text was updated successfully, but these errors were encountered: