23_就绪队列篇
本篇关键词:、、、
下载 >> 离线文档.鸿蒙内核源码分析(百篇博客分析.挖透鸿蒙内核).pdf
任务管理相关篇为:
- v21.07 鸿蒙内核源码分析(任务控制块) | 内核最重要的概念
- v22.05 鸿蒙内核源码分析(并发并行) | 如何搞清楚它俩区分
- v23.03 鸿蒙内核源码分析(就绪队列) | 美好的事物永远值得等待
- v24.08 鸿蒙内核源码分析(调度机制) | 公平是相对的
- v25.05 鸿蒙内核源码分析(任务管理) | 如何管理任务池
- v26.03 鸿蒙内核源码分析(用栈方式) | 谁来提供程序运行场地
- v27.02 鸿蒙内核源码分析(软件定时器) | 内核最高级任务竟是它
- v28.01 鸿蒙内核源码分析(控制台) | 一个让很多人模糊的概念
- v29.01 鸿蒙内核源码分析(远程登录) | 内核如何接待远方的客人
- v30.01 鸿蒙内核源码分析(协议栈) | 正在制作中 ...
鸿蒙内核代码中有两个源文件是关于队列的,一个是用于调度的队列,另一个是用于线程间通讯的IPC队列。
IPC队列后续有专门的博文讲述,这两个队列的数据结构实现采用的都是双向循环链表,再说一遍LOS_DL_LIST实在是太重要了,是理解鸿蒙内核的关键,说是最重要的代码一点也不为过,源码出现在 sched_sq模块,说明是用于任务的调度的,sched_sq模块只有两个文件,另一个los_sched。c就是调度代码。
鸿蒙内核进程和线程各有32个就绪队列,进程队列用全局变量存放, 创建进程时入队, 任务队列放在进程的threadPriQueueList中。
映射张大爷的故事:就绪队列就是在外面排队的32个通道,按优先级0-31依次排好,张大爷的办公室有个牌子,类似打篮球的记分牌,一共32个,一字排开,队列里有人时对应的牌就是1,没有就是0 ,这样张大爷每次从0位开始看,看到的第一个1那就是最高优先级的那个人。办公室里的记分牌就是位图调度器。
//* 0x80000000U = 10000000000000000000000000000000(32位,1是用于移位的,设计之精妙,点赞)
#define PRIQUEUE_PRIOR0_BIT 0x80000000U
LITE_OS_SEC_BSS LOS_DL_LIST *g_priQueueList = NULL; //所有的队列 原始指针
LITE_OS_SEC_BSS UINT32 g_priQueueBitmap; // 位图调度整个los_priqueue。c就只有两个全部变量,一个是 LOS_DL_LIST *g_priQueueList 是32个进程就绪队列的头指针,在就绪队列中会讲另一个UINT32 g_priQueueBitmap 估计很多人会陌生,是一个32位的变量,叫位图调度器。怎么理解它呢?
鸿蒙系统的调度是抢占式的,task分成32个优先级,如何快速的知道哪个队列是空的,哪个队列里有任务需要一个标识,而且要极高效的实现?答案是:位图调度器。 系列篇已有专门讲位图管理的文章,自行翻看。简单说就是一个变量的位来标记对应队列中是否有任务,在位图调度下,任务优先级的值越小则代表具有越高的优先级,每当需要进行调度时,从最低位向最高位查找出第一个置 1 的位的所在位置,即为当前最高优先级,然后从对应优先级就绪队列获得相应的任务控制块,整个调度器的实现复杂度是 O(1),即无论任务多少,其调度时间是固定的。
CPU执行速度是很快的,其运算速度和内存的读写速度是数量级的差异,与硬盘的读写更是指数级。 鸿蒙内核默认一个时间片是 10ms, 资源很宝贵,它不断在众多任务中来回的切换,所以绝不能让CPU等待任务,CPU时间很宝贵,没准备好的任务不要放进来。这就是进程和线程就绪队列的机制,一共有32个任务就绪队列,因为线程的优先级是默认32个, 每个队列中放同等优先级的task。 队列初始化做了哪些工作?详细看代码
#define OS_PRIORITY_QUEUE_NUM 32
//内部队列初始化
UINT32 OsPriQueueInit(VOID)
{
UINT32 priority;
/* system resident resource *///常驻内存
g_priQueueList = (LOS_DL_LIST *)LOS_MemAlloc(m_aucSysMem0, (OS_PRIORITY_QUEUE_NUM * sizeof(LOS_DL_LIST)));//分配32个队列头节点
if (g_priQueueList == NULL) {
return LOS_NOK;
}
for (priority = 0; priority < OS_PRIORITY_QUEUE_NUM; ++priority) {
LOS_ListInit(&g_priQueueList[priority]);//队列初始化,前后指针指向自己
}
return LOS_OK;
}因TASK 有32个优先级,在初始化时内核一次性创建了32个双向循环链表,每种优先级都有一个队列来记录就绪状态的tasks的位置,g_priQueueList分配的是一个连续的内存块,存放了32个双向链表
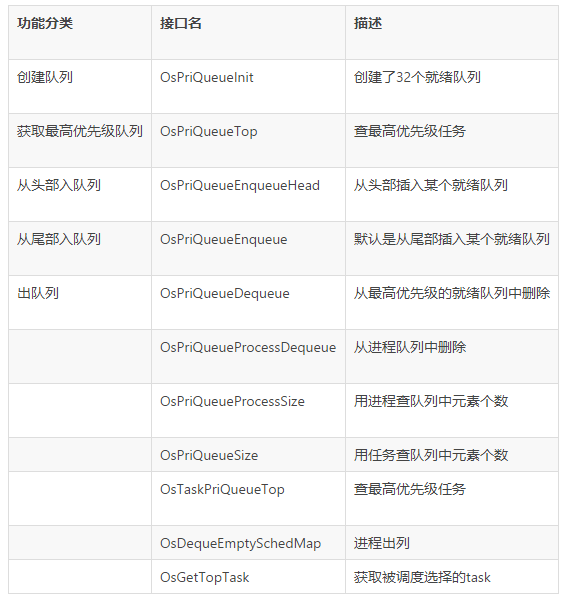
还是看入队和出队的源码吧,注意bitmap的变化!
从代码中可以知道,调用了LOS_ListTailInsert,注意是从循环链表的尾部插入的,也就是同等优先级的TASK被排在了最后一个执行,只要每次都是从尾部插入,就形成了一个按顺序执行的队列。鸿蒙内核的设计可谓非常巧妙,用极少的代码,极高的效率实现了队列功能。
VOID OsPriQueueEnqueue(LOS_DL_LIST *priQueueList, UINT32 *bitMap, LOS_DL_LIST *priqueueItem, UINT32 priority)
{
/*
* Task control blocks are inited as zero。 And when task is deleted,
* and at the same time would be deleted from priority queue or
* other lists, task pend node will restored as zero。
*/
LOS_ASSERT(priqueueItem->pstNext == NULL);
if (LOS_ListEmpty(&priQueueList[priority])) {
*bitMap |= PRIQUEUE_PRIOR0_BIT >> priority;//对应优先级位 置1
}
LOS_ListTailInsert(&priQueueList[priority], priqueueItem);
}
VOID OsPriQueueEnqueueHead(LOS_DL_LIST *priQueueList, UINT32 *bitMap, LOS_DL_LIST *priqueueItem, UINT32 priority)
{
/*
* Task control blocks are inited as zero。 And when task is deleted,
* and at the same time would be deleted from priority queue or
* other lists, task pend node will restored as zero。
*/
LOS_ASSERT(priqueueItem->pstNext == NULL);
if (LOS_ListEmpty(&priQueueList[priority])) {
*bitMap |= PRIQUEUE_PRIOR0_BIT >> priority;//对应优先级位 置1
}
LOS_ListHeadInsert(&priQueueList[priority], priqueueItem);
}
VOID OsPriQueueDequeue(LOS_DL_LIST *priQueueList, UINT32 *bitMap, LOS_DL_LIST *priqueueItem)
{
LosTaskCB *task = NULL;
LOS_ListDelete(priqueueItem);
task = LOS_DL_LIST_ENTRY(priqueueItem, LosTaskCB, pendList);
if (LOS_ListEmpty(&priQueueList[task->priority])) {
*bitMap &= ~(PRIQUEUE_PRIOR0_BIT >> task->priority);//队列空了,对应优先级位 置0
}
}请先想一下这个问题。
进程和线程是一对多的父子关系,内核调度的单元是任务(线程),鸿蒙内核中任务和线程是一个东西,只是不同的身份。一个进程可以有多个线程,线程又有各自独立的状态,那进程状态该怎么界定?例如:ProcessA 有 TaskA(阻塞状态) ,TaskB(就绪状态) 两个线程,ProcessA是属于阻塞状态还是就绪状态呢?
先看官方文档的说明后再看源码。
进程状态迁移说明:
-
Init→Ready:
进程创建或fork时,拿到该进程控制块后进入Init状态,处于进程初始化阶段,当进程初始化完成将进程插入调度队列,此时进程进入就绪状态。
-
Ready→Running:
进程创建后进入就绪态,发生进程切换时,就绪列表中最高优先级的进程被执行,从而进入运行态。若此时该进程中已无其它线程处于就绪态,则该进程从就绪列表删除,只处于运行态;若此时该进程中还有其它线程处于就绪态,则该进程依旧在就绪队列,此时进程的就绪态和运行态共存。
-
Running→Pend:
进程内所有的线程均处于阻塞态时,进程在最后一个线程转为阻塞态时,同步进入阻塞态,然后发生进程切换。
-
Pend→Ready / Pend→Running:
阻塞进程内的任意线程恢复就绪态时,进程被加入到就绪队列,同步转为就绪态,若此时发生进程切换,则进程状态由就绪态转为运行态。
-
Ready→Pend:
进程内的最后一个就绪态线程处于阻塞态时,进程从就绪列表中删除,进程由就绪态转为阻塞态。
-
Running→Ready:
进程由运行态转为就绪态的情况有以下两种:
1。 有更高优先级的进程创建或者恢复后,会发生进程调度,此刻就绪列表中最高优先级进程变为运行态,那么原先运行的进程由运行态变为就绪态。 2。 若进程的调度策略为SCHED_RR,且存在同一优先级的另一个进程处于就绪态,则该进程的时间片消耗光之后,该进程由运行态转为就绪态,另一个同优先级的进程由就绪态转为运行态。
-
Running→Zombies:
当进程的主线程或所有线程运行结束后,进程由运行态转为僵尸态,等待父进程回收资源。
从文档中可知,一个进程是可以两种状态共存的。
UINT16 processStatus; /**< [15:4] process Status; [3:0] The number of threads currently
running in the process */
processCB->processStatus &= ~(status | OS_PROCESS_STATUS_PEND);//取反后的与位运算
processCB->processStatus |= OS_PROCESS_STATUS_READY;//或位运算一个变量存两种状态,怎么做到的?答案还是 按位保存啊。还记得上面的位图调度 g_priQueueBitmap吗,那可是存了32种状态的。其实这在任何一个系统的内核源码中都很常见,类似的还有 左移 <<,右移 >>等等
继续说进程和线程的关系,线程的优先级必须和进程一样吗?他们可以不一样吗?答案是:当然不一样,否则怎么会有设置task优先级的函数。其实task有专门的bitmap来记录它曾经有过的优先级记录, 比如在调度过程中如果遇到阻塞,内核往往会提高持有锁的task的优先级,让它能以最大概率被下一轮调度选中而快速释放锁资源。
真正让CPU工作的是task,进程只是个装task的容器,task有任务栈空间,进程结构体LosProcessCB 有一个这样的定义。看名字就知道了,那是跟调度相关的。
UINT32 threadScheduleMap; /**< The scheduling bitmap table for the thread group of the
process */
LOS_DL_LIST threadPriQueueList[OS_PRIORITY_QUEUE_NUM]; /**< The process's thread group schedules the
priority hash table */咋一看怎么进程的结构体里也有32个队列,其实这就是task的就绪状态队列。threadScheduleMap就是进程自己的位图调度器。具体看进程入队和出队的源码。调度过程是先去进程就绪队列里找最高优先级的进程,然后去该进程找最高优先级的线程来调度。具体看笔者认为的内核最美函数OsGetTopTask,能欣赏到他的美就读懂了就绪队列是怎么管理的。
LITE_OS_SEC_TEXT_MINOR LosTaskCB *OsGetTopTask(VOID)
{
UINT32 priority, processPriority;
UINT32 bitmap;
UINT32 processBitmap;
LosTaskCB *newTask = NULL;
#if (LOSCFG_KERNEL_SMP == YES)
UINT32 cpuid = ArchCurrCpuid();
#endif
LosProcessCB *processCB = NULL;
processBitmap = g_priQueueBitmap;
while (processBitmap) {
processPriority = CLZ(processBitmap);
LOS_DL_LIST_FOR_EACH_ENTRY(processCB, &g_priQueueList[processPriority], LosProcessCB, pendList) {
bitmap = processCB->threadScheduleMap;
while (bitmap) {
priority = CLZ(bitmap);
LOS_DL_LIST_FOR_EACH_ENTRY(newTask, &processCB->threadPriQueueList[priority], LosTaskCB, pendList) {
#if (LOSCFG_KERNEL_SMP == YES)
if (newTask->cpuAffiMask & (1U << cpuid)) {
#endif
newTask->taskStatus &= ~OS_TASK_STATUS_READY;
OsPriQueueDequeue(processCB->threadPriQueueList,
&processCB->threadScheduleMap,
&newTask->pendList);
OsDequeEmptySchedMap(processCB);
goto OUT;
#if (LOSCFG_KERNEL_SMP == YES)
}
#endif
}
bitmap &= ~(1U << (OS_PRIORITY_QUEUE_NUM - priority - 1));
}
}
processBitmap &= ~(1U << (OS_PRIORITY_QUEUE_NUM - processPriority - 1));
}
OUT:
return newTask;
}映射张大爷的故事:张大爷喊到张全蛋时进场时表演时,张全蛋要决定自己的哪个节目先表演,也要查下他的清单上优先级,它同样也有个张大爷同款记分牌,就这么简单。
- 百文相当于摸出内核的肌肉和器官系统,让人开始丰满有立体感,因是直接从注释源码起步,在加注释过程中,每每有心得处就整理,慢慢形成了以下文章。内容立足源码,常以生活场景打比方尽可能多的将内核知识点置入某种场景,具有画面感,容易理解记忆。说别人能听得懂的话很重要! 百篇博客绝不是百度教条式的在说一堆诘屈聱牙的概念,那没什么意思。更希望让内核变得栩栩如生,倍感亲切。
- 与代码需不断
debug一样,文章内容会存在不少错漏之处,请多包涵,但会反复修正,持续更新,v**.xx代表文章序号和修改的次数,精雕细琢,言简意赅,力求打造精品内容。 - 百文在 < 鸿蒙研究站 | 开源中国 | 博客园 | 51cto | csdn | 知乎 | 掘金 > 站点发布,百篇博客系列目录如下。

按功能模块:
| 基础知识 | 进程管理 | 任务管理 | 内存管理 |
|---|---|---|---|
| 双向链表 内核概念 源码结构 地址空间 计时单位 优雅的宏 钩子框架 位图管理 POSIX main函数 | 调度故事 进程控制块 进程空间 线性区 红黑树 进程管理 Fork进程 进程回收 Shell编辑 Shell解析 | 任务控制块 并发并行 就绪队列 调度机制 任务管理 用栈方式 软件定时器 控制台 远程登录 协议栈 | 内存规则 物理内存 内存概念 虚实映射 页表管理 静态分配 TLFS算法 内存池管理 原子操作 圆整对齐 |
| 通讯机制 | 文件系统 | 硬件架构 | 内核汇编 |
| 通讯总览 自旋锁 互斥锁 快锁使用 快锁实现 读写锁 信号量 事件机制 信号生产 信号消费 消息队列 消息封装 消息映射 共享内存 | 文件概念 文件故事 索引节点 VFS 文件句柄 根文件系统 挂载机制 管道文件 文件映射 写时拷贝 | 芯片模式 ARM架构 指令集 协处理器 工作模式 寄存器 多核管理 中断概念 中断管理 | 编码方式 汇编基础 汇编传参 链接脚本 内核启动 进程切换 任务切换 中断切换 异常接管 缺页中断 |
| 编译运行 | 调测工具 | ||
| 编译过程 编译构建 GN语法 忍者无敌 ELF格式 ELF解析 静态链接 重定位 动态链接 进程映像 应用启动 系统调用 VDSO | 模块监控 日志跟踪 系统安全 测试用例 |
-
百万汉字注解内核目的是要看清楚其毛细血管,细胞结构,等于在拿放大镜看内核。内核并不神秘,带着问题去源码中找答案是很容易上瘾的,你会发现很多文章对一些问题的解读是错误的,或者说不深刻难以自圆其说,你会慢慢形成自己新的解读,而新的解读又会碰到新的问题,如此层层递进,滚滚向前,拿着放大镜根本不愿意放手。
-
< gitee | github | coding | gitcode > 四大码仓推送 | 同步官方源码。

期间不断得到小伙伴的支持,有学生,有职场新人,也有老江湖,在此一并感谢,大家的支持是前进的动力。尤其每次收到学生的赞助很感慨,后生可敬。 >> 查看捐助名单

据说喜欢 点赞 + 分享 的,后来都成了大神。:)