24_调度机制篇
本篇关键词:、、、

下载 >> 离线文档.鸿蒙内核源码分析(百篇博客分析.挖透鸿蒙内核).pdf
任务管理相关篇为:
- v21.07 鸿蒙内核源码分析(任务控制块) | 内核最重要的概念
- v22.05 鸿蒙内核源码分析(并发并行) | 如何搞清楚它俩区分
- v23.03 鸿蒙内核源码分析(就绪队列) | 美好的事物永远值得等待
- v24.08 鸿蒙内核源码分析(调度机制) | 公平是相对的
- v25.05 鸿蒙内核源码分析(任务管理) | 如何管理任务池
- v26.03 鸿蒙内核源码分析(用栈方式) | 谁来提供程序运行场地
- v27.02 鸿蒙内核源码分析(软件定时器) | 内核最高级任务竟是它
- v28.01 鸿蒙内核源码分析(控制台) | 一个让很多人模糊的概念
- v29.01 鸿蒙内核源码分析(远程登录) | 内核如何接待远方的客人
- v30.01 鸿蒙内核源码分析(协议栈) | 正在制作中 ...
鸿蒙的内核中 Task 和 线程 在广义上可以理解为是一个东西,但狭义上肯定会有区别,区别在于管理体系的不同,Task是调度层面的概念,线程是进程层面概念。比如 main() 函数中首个函数 OsSetMainTask(); 就是设置启动任务,但此时啥都还没开始呢,Kprocess 进程都没创建,怎么会有大家一般意义上所理解的线程呢。狭义上的后续有 鸿蒙内核源码分析(启动过程篇) 来说明。不知道大家有没有这种体会,学一个东西的过程中要接触很多新概念,尤其像 Java/android 的生态,概念贼多,很多同学都被绕在概念中出不来,痛苦不堪。那问题是为什么需要这么多的概念呢?
举个例子就明白了:
假如您去深圳参加一个面试老板问你哪里人?你会说是 江西人,湖南人。。。 而不会说是张家村二组的张全蛋,这样还谁敢要你。但如果你参加同乡会别人问你同样问题,你不会说是来自东北那旮沓的,却反而要说张家村二组的张全蛋。明白了吗?张全蛋还是那个张全蛋,但因为场景变了,您的说法就得必须跟着变,否则没法愉快的聊天。程序设计就是源于生活,归于生活,大家对程序的理解就是要用生活中的场景去打比方,更好的理解概念。
那在内核的调度层面,咱们只说task, task是内核调度的单元,调度就是围着它转。
先看看task从哪些渠道产生:
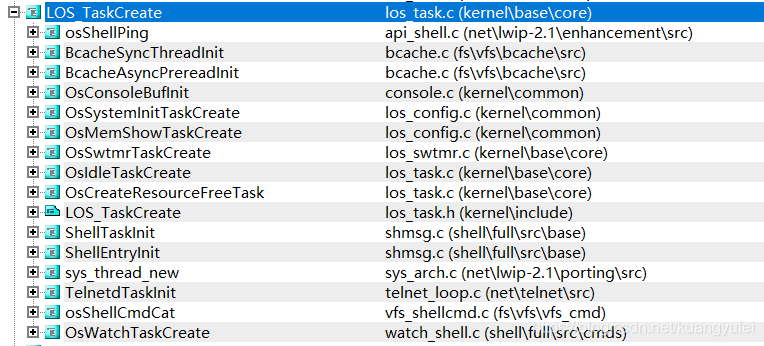
渠道很多,可能是shell 的一个命令,也可能由内核创建,更多的是大家编写应用程序new出来的一个线程。
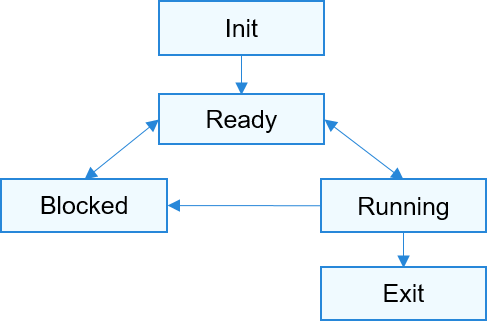
调度的内容task已经有了,那他们是如何被有序调度的呢?答案:是32个进程和线程就绪队列,各32个哈,为什么是32个,鸿蒙系统源码分析(总目录) 文章里有详细说明,自行去翻。这张进程状态迁移示意图一定要看明白。
注意:进程和线程的队列内的内容只针对就绪状态,其他状态内核并没有用队列去描述它,(线程的阻塞状态用的是pendlist链表),因为就绪就意味着工作都准备好了就等着被调度到CPU来执行了。所以理解就绪队列很关键,有三种情况会加入就绪队列。
-
Init→Ready:
进程创建或fork时,拿到该进程控制块后进入Init状态,处于进程初始化阶段,当进程初始化完成将进程插入调度队列,此时进程进入就绪状态。
-
Pend→Ready / Pend→Running:
阻塞进程内的任意线程恢复就绪态时,进程被加入到就绪队列,同步转为就绪态,若此时发生进程切换,则进程状态由就绪态转为运行态。
-
Running→Ready:
进程由运行态转为就绪态的情况有以下两种:
-
有更高优先级的进程创建或者恢复后,会发生进程调度,此刻就绪列表中最高优先级进程变为运行态,那么原先运行的进程由运行态变为就绪态。
-
若进程的调度策略为SCHED_RR,且存在同一优先级的另一个进程处于就绪态,则该进程的时间片消耗光之后,该进程由运行态转为就绪态,另一个同优先级的进程由就绪态转为运行态。
就绪队列让task各就各位,在其生命周期内不停的进行状态流转,调度是让task交给CPU处理,那又是什么让调度去工作的呢?它是如何被触发的?
笔者能想到的触发方式是以下四个:
- Tick(时钟管理),类似于JAVA的定时任务,时间到了就触发。系统定时器是内核时间机制中最重要的一部分,它提供了一种周期性触发中断机制,即系统定时器以HZ(时钟节拍率)为频率自行触发时钟中断。当时钟中断发生时,内核就通过时钟中断处理程序OsTickHandler对其进行处理。鸿蒙内核默认是10ms触发一次,执行以下中断函数:
/*
* Description : Tick interruption handler
*/
LITE_OS_SEC_TEXT VOID OsTickHandler(VOID)
{
UINT32 intSave;
TICK_LOCK(intSave);
g_tickCount[ArchCurrCpuid()]++;
TICK_UNLOCK(intSave);
#ifdef LOSCFG_KERNEL_VDSO
OsUpdateVdsoTimeval();
#endif
#ifdef LOSCFG_KERNEL_TICKLESS
OsTickIrqFlagSet(OsTicklessFlagGet());
#endif
#if (LOSCFG_BASE_CORE_TICK_HW_TIME == YES)
HalClockIrqClear(); /* diff from every platform */
#endif
OsTimesliceCheck();//时间片检查
OsTaskScan(); /* task timeout scan *///任务扫描,发起调度
#if (LOSCFG_BASE_CORE_SWTMR == YES)
OsSwtmrScan();//软时钟扫描检查
#endif
}里面对任务进行了扫描,时间片到了或就绪队列有高或同级task, 会执行调度。
- 第二个是各种软硬中断,如何USB插拔,键盘,鼠标这些外设引起的中断,需要去执行中断处理函数。
- 第三个是程序主动中断,比如运行过程中需要申请其他资源,而主动让出控制权,重新调度。
- 最后一个是创建一个新进程或新任务后主动发起的抢占式调度,新进程会默认创建一个main task, task的首条指令(入口函数)就是我们上层程序的main函数,它被放在代码段的第一的位置。
- 哪些地方会申请调度?看一张图。
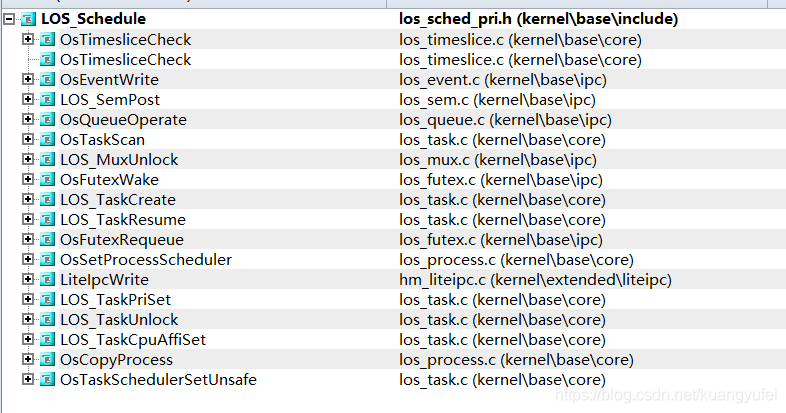
这里提下图中的 OsCopyProcess(), 这是fork进程的主体函数,可以看出fork之后立即申请了一次调度。
LITE_OS_SEC_TEXT INT32 LOS_Fork(UINT32 flags, const CHAR *name, const TSK_ENTRY_FUNC entry, UINT32 stackSize)
{
UINT32 cloneFlag = CLONE_PARENT | CLONE_THREAD | CLONE_VFORK | CLONE_FILES;
if (flags & (~cloneFlag)) {
PRINT_WARN("Clone dont support some flags!\n");
}
flags |= CLONE_FILES;
return OsCopyProcess(cloneFlag & flags, name, (UINTPTR)entry, stackSize);
}
STATIC INT32 OsCopyProcess(UINT32 flags, const CHAR *name, UINTPTR sp, UINT32 size)
{
UINT32 intSave, ret, processID;
LosProcessCB *run = OsCurrProcessGet();
LosProcessCB *child = OsGetFreePCB();
if (child == NULL) {
return -LOS_EAGAIN;
}
processID = child->processID;
ret = OsForkInitPCB(flags, child, name, sp, size);
if (ret != LOS_OK) {
goto ERROR_INIT;
}
ret = OsCopyProcessResources(flags, child, run);
if (ret != LOS_OK) {
goto ERROR_TASK;
}
ret = OsChildSetProcessGroupAndSched(child, run);
if (ret != LOS_OK) {
goto ERROR_TASK;
}
LOS_MpSchedule(OS_MP_CPU_ALL);
if (OS_SCHEDULER_ACTIVE) {
LOS_Schedule();// 申请调度
}
return processID;
ERROR_TASK:
SCHEDULER_LOCK(intSave);
(VOID)OsTaskDeleteUnsafe(OS_TCB_FROM_TID(child->threadGroupID), OS_PRO_EXIT_OK, intSave);
ERROR_INIT:
OsDeInitPCB(child);
return -ret;
}原来创建一个进程这么简单,真的就是在COPY!
以上是需要提前了解的信息,接下来直接上源码看调度过程吧,文件就三个函数,主要就是这个了:
VOID OsSchedResched(VOID)
{
LOS_ASSERT(LOS_SpinHeld(&g_taskSpin));//调度过程要上锁
newTask = OsGetTopTask(); //获取最高优先级任务
OsSchedSwitchProcess(runProcess, newProcess);//切换进程
(VOID)OsTaskSwitchCheck(runTask, newTask);//任务检查
OsCurrTaskSet((VOID*)newTask);//*设置当前任务
if (OsProcessIsUserMode(newProcess)) {//判断是否为用户态,使用用户空间
OsCurrUserTaskSet(newTask->userArea);//设置任务空间
}
/* do the task context switch */
OsTaskSchedule(newTask, runTask); //切换CPU任务上下文,汇编代码实现
}函数有点长,笔者留了最重要的几行,看这几行就够了,流程如下:
- 调度过程要自旋锁,多核情况下只能被一个CPU core 执行。 不允许任何中断发生, 没错,说的是任何事是不能去打断它,否则后果太严重了,这可是内核在切换进程和线程的操作啊。
- 在就绪队列里找个最高优先级的task
- 切换进程,就是task归属的那个进程设为运行进程,这里要注意,老的task和老进程只是让出了CPU指令执行权,其他都还在内存,资源也都没有释放。
- 设置新任务为当前任务
- 用户模式下需要设置task运行空间,因为每个task栈是不一样的。空间部分具体在系列篇内存中查看
- 是最重要的,切换任务上下文,参数是新老两个任务,一个要保存现场,一个要恢复现场。
什么是任务上下文?v08。xx 鸿蒙内核源码分析(总目录) 任务切换篇已有详细的描述,请自行翻看。
读懂OsGetTopTask(),就明白了就绪队列是怎么回事了。这里提下goto语句,几乎所有内核代码都会大量的使用goto语句,鸿蒙内核有617个goto远大于264个break,还有人说要废掉goto,你知道内核开发者青睐goto的真正原因吗?
LITE_OS_SEC_TEXT_MINOR LosTaskCB *OsGetTopTask(VOID)
{
UINT32 priority, processPriority;
UINT32 bitmap;
UINT32 processBitmap;
LosTaskCB *newTask = NULL;
#if (LOSCFG_KERNEL_SMP == YES)
UINT32 cpuid = ArchCurrCpuid();
#endif
LosProcessCB *processCB = NULL;
processBitmap = g_priQueueBitmap;
while (processBitmap) {
processPriority = CLZ(processBitmap);
LOS_DL_LIST_FOR_EACH_ENTRY(processCB, &g_priQueueList[processPriority], LosProcessCB, pendList) {
bitmap = processCB->threadScheduleMap;
while (bitmap) {
priority = CLZ(bitmap);
LOS_DL_LIST_FOR_EACH_ENTRY(newTask, &processCB->threadPriQueueList[priority], LosTaskCB, pendList) {
#if (LOSCFG_KERNEL_SMP == YES)
if (newTask->cpuAffiMask & (1U << cpuid)) {
#endif
newTask->taskStatus &= ~OS_TASK_STATUS_READY;
OsPriQueueDequeue(processCB->threadPriQueueList,
&processCB->threadScheduleMap,
&newTask->pendList);
OsDequeEmptySchedMap(processCB);
goto OUT;
#if (LOSCFG_KERNEL_SMP == YES)
}
#endif
}
bitmap &= ~(1U << (OS_PRIORITY_QUEUE_NUM - priority - 1));
}
}
processBitmap &= ~(1U << (OS_PRIORITY_QUEUE_NUM - processPriority - 1));
}
OUT:
return newTask;
}
#ifdef __cplusplus
#if __cplusplus
}- 百文相当于摸出内核的肌肉和器官系统,让人开始丰满有立体感,因是直接从注释源码起步,在加注释过程中,每每有心得处就整理,慢慢形成了以下文章。内容立足源码,常以生活场景打比方尽可能多的将内核知识点置入某种场景,具有画面感,容易理解记忆。说别人能听得懂的话很重要! 百篇博客绝不是百度教条式的在说一堆诘屈聱牙的概念,那没什么意思。更希望让内核变得栩栩如生,倍感亲切。
- 与代码需不断
debug一样,文章内容会存在不少错漏之处,请多包涵,但会反复修正,持续更新,v**.xx代表文章序号和修改的次数,精雕细琢,言简意赅,力求打造精品内容。 - 百文在 < 鸿蒙研究站 | 开源中国 | 博客园 | 51cto | csdn | 知乎 | 掘金 > 站点发布,百篇博客系列目录如下。

按功能模块:
| 基础知识 | 进程管理 | 任务管理 | 内存管理 |
|---|---|---|---|
| 双向链表 内核概念 源码结构 地址空间 计时单位 优雅的宏 钩子框架 位图管理 POSIX main函数 | 调度故事 进程控制块 进程空间 线性区 红黑树 进程管理 Fork进程 进程回收 Shell编辑 Shell解析 | 任务控制块 并发并行 就绪队列 调度机制 任务管理 用栈方式 软件定时器 控制台 远程登录 协议栈 | 内存规则 物理内存 内存概念 虚实映射 页表管理 静态分配 TLFS算法 内存池管理 原子操作 圆整对齐 |
| 通讯机制 | 文件系统 | 硬件架构 | 内核汇编 |
| 通讯总览 自旋锁 互斥锁 快锁使用 快锁实现 读写锁 信号量 事件机制 信号生产 信号消费 消息队列 消息封装 消息映射 共享内存 | 文件概念 文件故事 索引节点 VFS 文件句柄 根文件系统 挂载机制 管道文件 文件映射 写时拷贝 | 芯片模式 ARM架构 指令集 协处理器 工作模式 寄存器 多核管理 中断概念 中断管理 | 编码方式 汇编基础 汇编传参 链接脚本 内核启动 进程切换 任务切换 中断切换 异常接管 缺页中断 |
| 编译运行 | 调测工具 | ||
| 编译过程 编译构建 GN语法 忍者无敌 ELF格式 ELF解析 静态链接 重定位 动态链接 进程映像 应用启动 系统调用 VDSO | 模块监控 日志跟踪 系统安全 测试用例 |
-
百万汉字注解内核目的是要看清楚其毛细血管,细胞结构,等于在拿放大镜看内核。内核并不神秘,带着问题去源码中找答案是很容易上瘾的,你会发现很多文章对一些问题的解读是错误的,或者说不深刻难以自圆其说,你会慢慢形成自己新的解读,而新的解读又会碰到新的问题,如此层层递进,滚滚向前,拿着放大镜根本不愿意放手。
-
< gitee | github | coding | gitcode > 四大码仓推送 | 同步官方源码。

期间不断得到小伙伴的支持,有学生,有职场新人,也有老江湖,在此一并感谢,大家的支持是前进的动力。尤其每次收到学生的赞助很感慨,后生可敬。 >> 查看捐助名单

据说喜欢 点赞 + 分享 的,后来都成了大神。:)