
ROS meta-package for autonomous vehicle navigation.
- Topic/service namespace model is migrated to ROS recommended style. See each package's README and runtime migration messages from the nodes.
Note: neonavigation_msgs meta-package is required to build neonavigation meta-package.
# clone
cd /path/to/your/catkin_ws/src
git clone https://github.com/at-wat/neonavigation.git
git clone https://github.com/at-wat/neonavigation_msgs.git
# build
cd /path/to/your/catkin_ws
rosdep install --from-paths src --ignore-src -y # Install dependencies
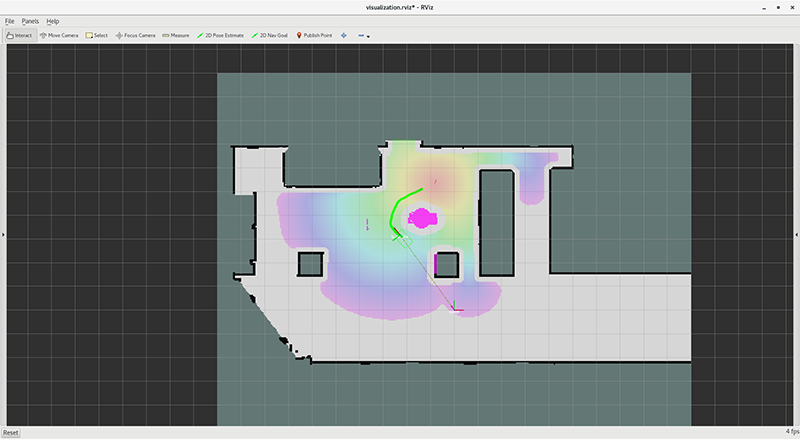
catkin_make -DCMAKE_BUILD_TYPE=Release # Release build is recommendedA quick demonstration with a simple simulated robot is available.
roslaunch neonavigation_launch demo.launch
3-DOF configuration space costmap handler.
2-D/3-DOF seamless global-local path and motion planner and serial joint collision avoidance.
Collision prevention control.
Path following control and path handling.
Layered map handler.
Slip compensation for vehicle odometry.
Obj surface data to pointcloud converter.
Sample launch files.
A. Watanabe, D. Endo, G. Yamauchi and K. Nagatani, "Neonavigation meta-package: 2-D/3-DOF seamless global-local planner for ROS — Development and field test on the representative offshore oil plant," 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 2016, pp. 86-91. (doi: 10.1109/SSRR.2016.7784282)
neonavigation meta-package is available under BSD license.