====== This code presents an open source tool for simulating autonomous vehicles in complex, high traffic, scenarios.
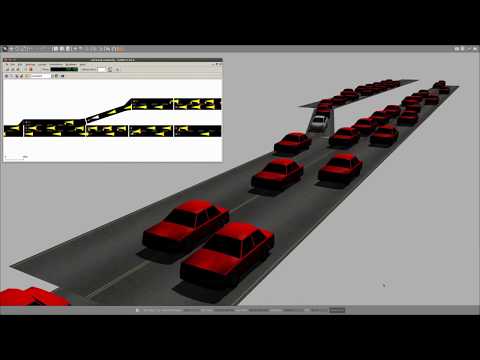
The hybrid simulation fully integrates and synchronizes SUMO a microscopic, multi-modal traffic simulator and GAZEBO a complex 3D simulator.
Experiments for the hybrid simulation tool in a merge scenario with very high traffic.
The hybrid simulation tested on the following software
- Ubuntu 18.04
- ROS Melodic
- Gazebo version 9.0.0
- SUMO Version 0.32.0
All of them can be installed using the standard installation process.
Make sure all ROS dependencies are installed.
cd [your-catkin-workspace]
rosdep install -y -r -q --from-paths src --ignore-src --rosdistro melodicThe example provided uses as ego-vehicle the Demo of Prius in ROS/GAZEBO provided by the osrf. It can be found in https://github.com/osrf/car_demo
The code compiles only using catkin_make.
-
cd to catkin workspace
cd [your-catkin-workspace] catkin_make hybrid_simulation
- Run
roslaunch hybrid_simulation hybrid_simulation.launch - Rviz is going to launch. You can enable the images (cameras)
- Wait till everything is launched and loaded in Gazebo and start the hybrid simulation by clicking the play button in SUMO.
This package contains one executable for interfacing with SUMO and one Gazebo plugin.
The gazebo plugin SumoWorldPlugin is in charge of controlling the position of the vehicles in gazebo.
It needs to be added to the gazebo world. This is done by adding the following lines to the gazebo world file.
<!-- World plugin for controlling sumo vehicles -->
<plugin name="SumoUpdate" filename="libSumoWorldPlugin.so">
<ego_vehicle_model_name>prius</ego_vehicle_model_name>
</plugin>This plugin controls the position of all additional vehicles. It has only one parameter (ego_vehicle_model), it must be the same as the one set as the ROS parameter /ego_vehicle_name
The control_other_vehicles.py executable is a standalone executable that interfaces with SUMO and controls the execution of the traffic simulation, and it allows the message passing towards Gazebo.
It is suggested to run the launch files than to run the bin files
hybrid_simulation.launch- Main launcher with full simulationspawn_prius.launch- Spawns the Prius model in Gazebosumo_interface.launch- Launches the SUMO simulator and the interface to communicate with gazebo.
Source code for the Gazebo plugin
Main source for the SUMO control interface
Source code for the EgoVehicle class: sets the status of ego-vehicle in SUMO with the values from Gazebo
Source code for the generation of the SUMO route file network_traci.rou.xml
Source code for auxiliary classes to control and interface with the simulation.
Simulation and overall configuration file for the SUMO simulation.
Description of the scenario, roads, intersections and other elements. It was created using the NETEDIT tool included in the SUMO installation.
Definition of a detector to control an intelligent traffic light.
Different launchers detailed above.
Mesh file for the car model used for all additional vehicles.
SDF file for the car model used for all additional vehicles.
World file, with the scenario and Roads description for Gazebo. Includes the SumoWorldPlugin.