
![]()
Pronto is an efficient, versatile and modular EKF state estimator for both proprioceptive (inertial, kinematics) and exteroceptive (LIDAR, camera) sensor fusion. It has been used with a variety of inputs from sensors such as IMUs (Microstrain, KVH, XSense), LIDAR (Hokuyo, Velodyne), cameras (Carnegie Robotics Multisense SL, Intel RealSense) and joint kinematics.
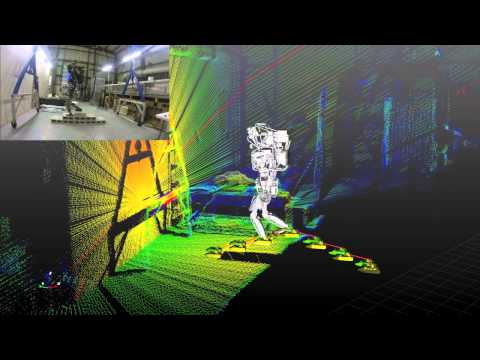
Pronto provided the state estimate that was used by MIT DRC team in the DARPA Robotics Challenge to estimate the position and motion of the Boston Dynamics Atlas robot.
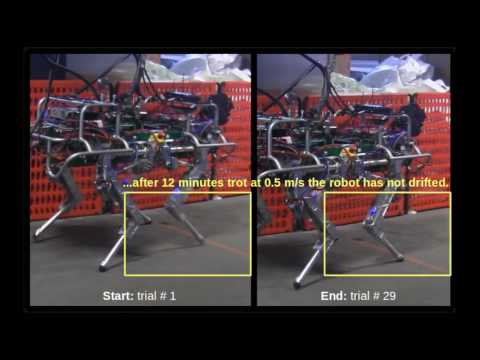
Since then, it has been adapted to estimate the motion of the NASA Valkyrie robot at the University of Edinburgh, the HyQ quadruped robot at the Istituto Italiano di Tecnologia, and the ANYmal quadruped robot at the University of Oxford.
Pronto was originally developed for Micro Aerial Vehicle state estimation. The modules specific to MAVs (e.g., altimeter, GPS) are not currently supported.
The algorithms (and their ROS wrappers) are written in C/C++ and organized as
catkin packages.
The repository consists of the following main modules:
pronto_core: core libraries that implment the filter, the state and basic measurement modules (e.g., IMU, pose update)pronto_bipedleg odometry measurement modules for humanoid robots (tested on Atlas and Valkyrie)pronto_quadrupedleg odometry libraries for a quadruped robot (tested on HyQ and ANYmal)pronto_quadruped_commonsabstract interfaces to perform leg odometry on a quadruped robot. This is a fork of theiit_commonspackage (see here).*_rosROS wrappers of the above modules- other support packages for filtering
Pronto depends on Eigen and Boost
The target operating system is Ubuntu 18.04 equipped with ROS Melodic.
Other versions of Ubuntu/ROS might work but they are not actively supported or tested.
Pronto is organized as a collection of catkin packages. To build the code,
just run catkin build followed by the name of the packages you are
interested to build.
To learn how to use Pronto on your robot, you can have a look at this repository, which contains a full implementation on the ANYmal quadruped robot.
If you use part of this work in academic context, please cite the following publication:
M. Camurri, M. Ramezani, S. Nobili, M. Fallon
Pronto: A Multi-Sensor State Estimator for Legged Robots in Real-World Scenarios
in Frontiers on Robotics and AI, 2020 (PDF) DOI: 10.3389/frobt.2020.00068
@article{camurri2020frontiers,
author = {Camurri, Marco and Ramezani, Milad and Nobili, Simona and Fallon, Maurice},
title = {{Pronto: A Multi-Sensor State Estimator for Legged Robots in Real-World Scenarios}},
journal = {Frontiers in Robotics and AI},
volume = {7},
number = {68},
pages = {1--18},
year = {2020},
url = {https://www.frontiersin.org/article/10.3389/frobt.2020.00068},
doi = {10.3389/frobt.2020.00068},
issn = {2296-9144}
}
S. Nobili, M. Camurri, V. Barasuol, M. Focchi, D.G. Caldwell, C. Semini, M. Fallon
Heterogeneous Sensor Fusion for Accurate State Estimation of Dynamic Legged Robots
in Proceedings of Robotics: Science and Systems XIII, 2017 (PDF) DOI: 10.15607/RSS.2017.XIII.007
@inproceedings{nobili2017rss,
author = {Simona Nobili AND Marco Camurri AND Victor Barasuol AND Michele Focchi AND Darwin Caldwell AND Claudio Semini AND Maurice Fallon},
title = {{Heterogeneous Sensor Fusion for Accurate State Estimation of Dynamic Legged Robots}},
booktitle = {Proceedings of Robotics: Science and Systems},
year = {2017},
address = {Cambridge, Massachusetts},
month = {July},
doi = {10.15607/RSS.2017.XIII.007}
}
M. Camurri, M. Fallon, S. Bazeille, A. Radulescu, V. Barasuol, D.G. Caldwell, C. Semini
Probabilistic Contact Estimation and Impact Detection for State Estimation of Quadruped Robots
in IEEE Robotics and Automation Letters, vol. 2, no. 2, pp. 1023-1030, April 2017 (PDF) DOI: 10.1109/LRA.2017.2652491
@article{camurri2017ral,
author={M. {Camurri} and M. {Fallon} and S. {Bazeille} and A. {Radulescu} and V. {Barasuol} and D. G. {Caldwell} and C. {Semini}},
journal={IEEE Robotics and Automation Letters},
title={{Probabilistic Contact Estimation and Impact Detection for State Estimation of Quadruped Robots}},
year = {2017},
volume = {2},
number = {2},
pages = {1023-1030},
doi = {10.1109/LRA.2017.2652491},
ISSN = {2377-3766},
month = {April}}
M. Fallon, M. Antone, N. Roy, S. Teller
Drift-Free Humanoid State Estimation fusing Kinematic, Inertial and LIDAR sensing
2014 IEEE-RAS International Conference on Humanoid Robots (PDF) DOI:10.1109/HUMANOIDS.2014.7041346
@inproceedings{fallon2014humanoids,
author={M. F. {Fallón} and M. {Antone} and N. {Roy} and S. {Teller}},
booktitle={2014 IEEE-RAS International Conference on Humanoid Robots},
title={Drift-free humanoid state estimation fusing kinematic, inertial and LIDAR sensing},
year={2014},
volume={},
number={},
pages={112-119},
doi={10.1109/HUMANOIDS.2014.7041346},
ISSN={},
month={Nov},}
A. Bry, A. Bachrach, N. Roy
State Estimation for Aggressive Flight in GPS-Denied Environments Using Onboard Sensing
2012 IEEE International Conference on Robotics and Automation (PDF) DOI:10.1109/ICRA.2012.6225295
@inproceedings{bry2012icra,
author={A. {Bry} and A. {Bachrach} and N. {Roy}},
booktitle={2012 IEEE International Conference on Robotics and Automation},
title={State estimation for aggressive flight in GPS-denied environments using onboard sensing},
year={2012},
volume={},
number={},
pages={1-8},
doi={10.1109/ICRA.2012.6225295},
ISSN={},
month={May},}
-
Originally Developed by Adam Bry, Abe Bachrach and Nicholas Roy of the MIT Robust Robotics Group for Micro Aerial Vehicles.
-
Extended to support humanoid motion by Maurice Fallon with the help of the MIT DARPA Robotics Challenge Team.
-
Support for quadruped robots, full ROS conversion and logo design by Marco Camurri (IIT Dynamic Legged System Lab and ORI Dynamic Robot Systems Group)
Andy Barry, Pat Marion, Dehann Fourie, Marco Frigerio, Michele Focchi, Benoit Casseau, Russell Buchanan, Wolfgang Merkt
Pronto is released under the LGPL v2.1 license. Please see the LICENSE file attached to this document for more information.