VASAD: a Volume and Semantic dataset for Building Reconstruction from Point Clouds
P-A. Langlois, A. Boulch, and R. Marlet. VASAD: Volumetric and Semantic Reconstruction, ICPR, 2022.
You can download VASAD on Kaggle.
Each folder contains the data for a given building. We provide the following files:
- model.obj: the raw file where each component of the building is represented separately.
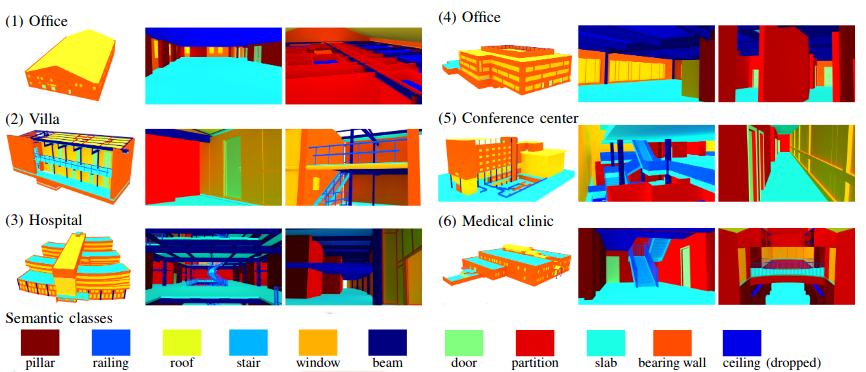
- colored_triangles.obj: each class of the dataset is colored for visualization purpose.
- ptView.json: a set of simulated camera locations
- samplesWithLabel.obj: a simulated Lidar scan (from the point of views in ptView.json) with a class label for each point.
- pov.obj: the list of point of views from which each point of samplesWithLabel.obj was taken from.
We also provide a labelled point cloud with features computed from FKAConv:
- lcpSamplesWithLabel.obj: a simulated Lidar scan (from the point of views in ptView.json with a FKAConv feature for each
- lcpPov.obj: the list of point of views from which each point of samplesWithLabel.obj was taken from.
- lcpVis.obj: a colored version of lcpSamplesWithLabel.obj using a argmax function on the features for visualization purpose.
The following classes are represented in the dataset:
- pillar
- railing
- roof
- stair
- window
- beam
- door
- partition
- slab
- bearing wall
- ceiling