操作系统: Windows 10
编译器: MinGW-w64(GCC 8.1)
OpenCV版本: 4.1
CMake: 3.16
请根据自己的OpenCV安装目录更改CMakeLists.txt的include_directories,link_directories和link_libraries ,换成对应的目录和文件。
(由于是在windows上开发的,所以没有用pkg来寻找库)
rm -r build/*
cd build
cmake ..
make -j4
./main根据平台不同,命令可能会有所不同,如在Windows下用MinGW-w64(Powershell):
rm -r build/*
cd build
cmake .. -G "MinGW Makefiles"
mingw-make -j4
./main.exe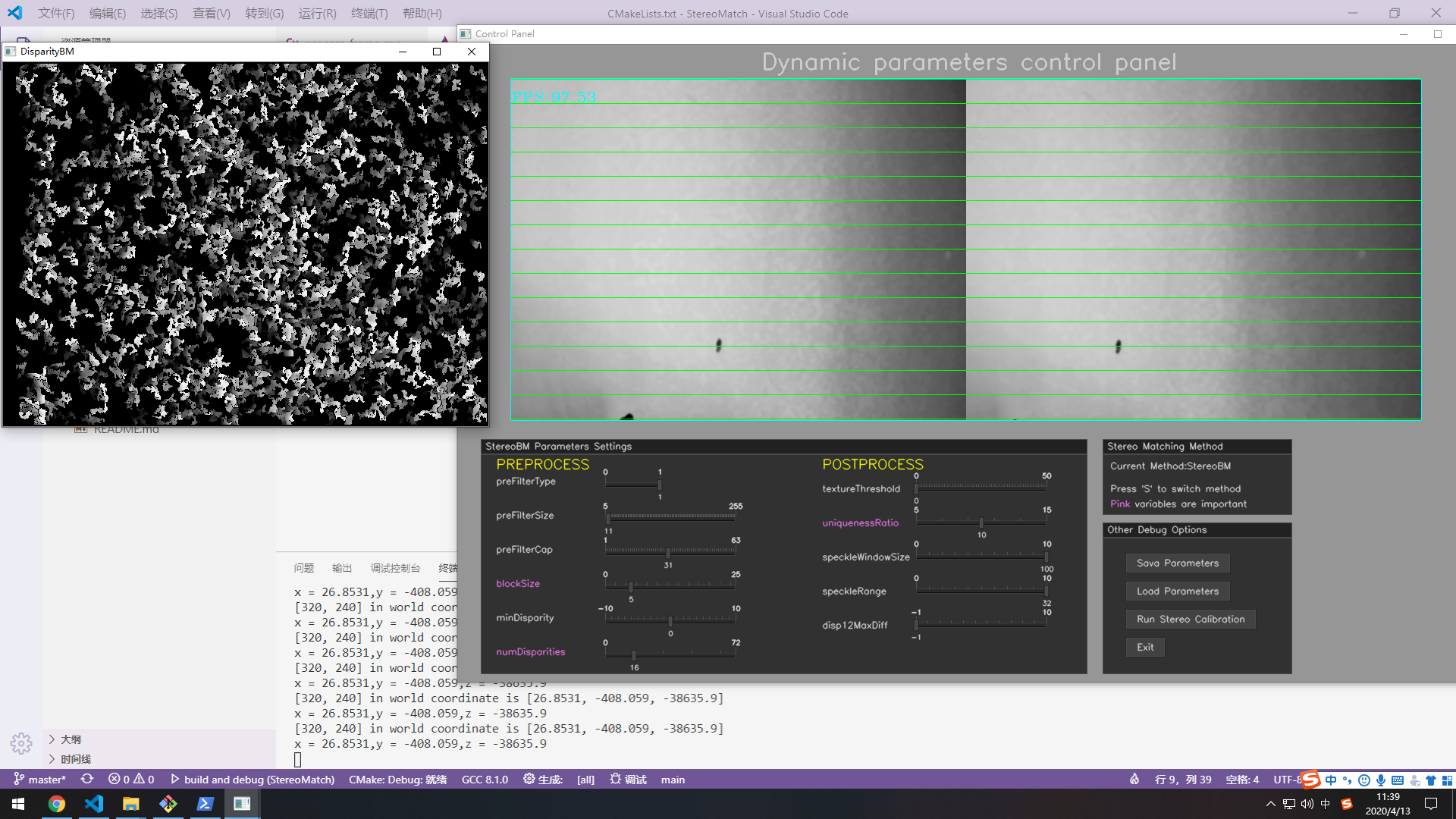
- 双目分辨率是1280*480,图中的分辨率有误,应该为每秒10帧左右
- 最后运算完成后得到深度图时间在0.19~0.21秒之间,也即FPS大概为5。
- 降低分辨率可以提升运算速度
本项目使用cvui界面进行参数调试:
cvui
cvui使用说明
调试过程中,按键盘S键可切换StereoBM和StereoSGBM算法
- 按钮
Save Parameter用以保存调试参数 - 按钮
Load Parameter用以从文件加载参数 - 按钮
Run Stereo Calibration暂时还没整合进来(项目是直接写入摄像头参数到变量中,没有生成yml文件) - 按钮
Exit退出程序 - 紫色变量是对生成的深度图质量好坏影响很大的变量
- 终端默认生成的三维坐标是像素重点[320,240]对应的世界坐标