
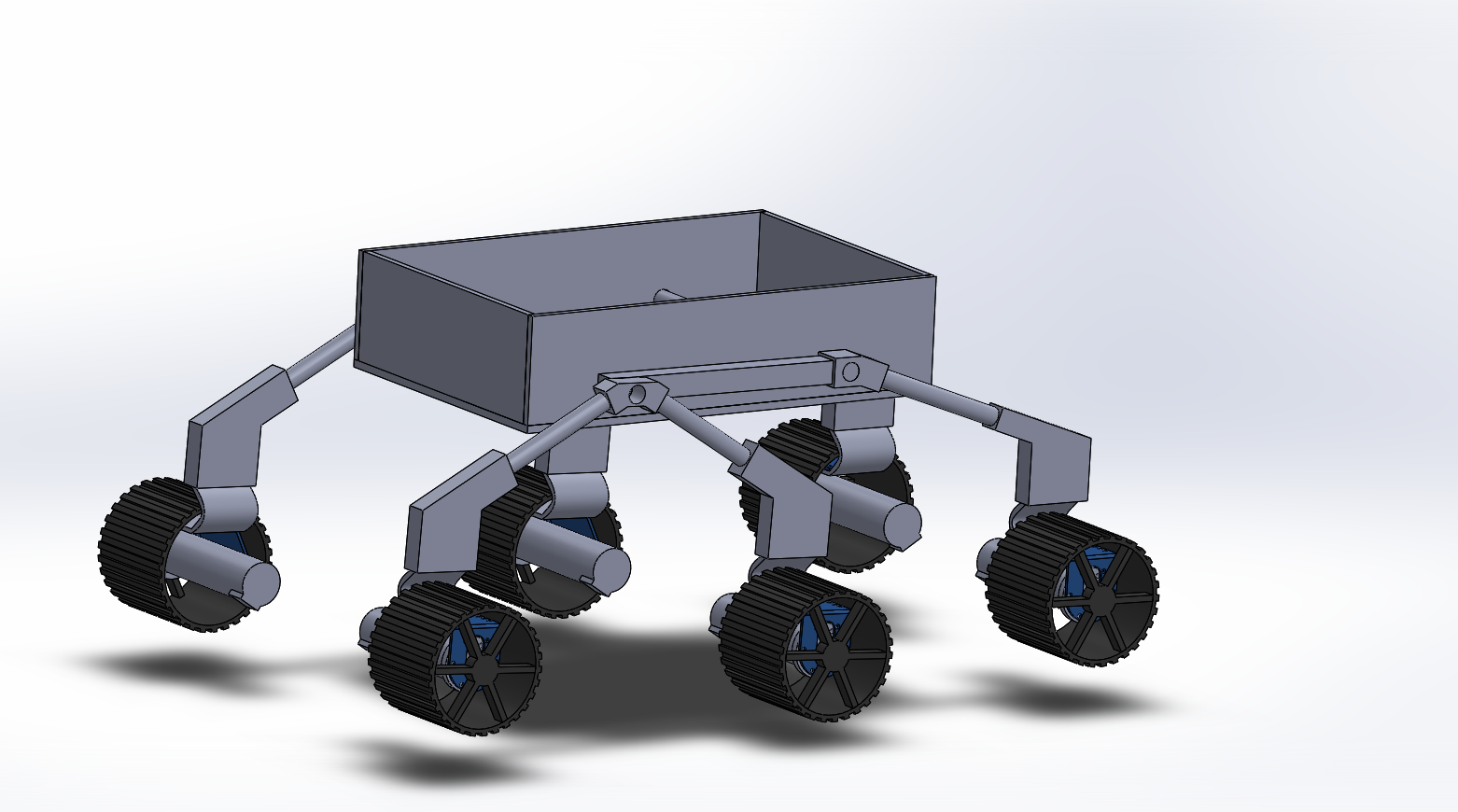
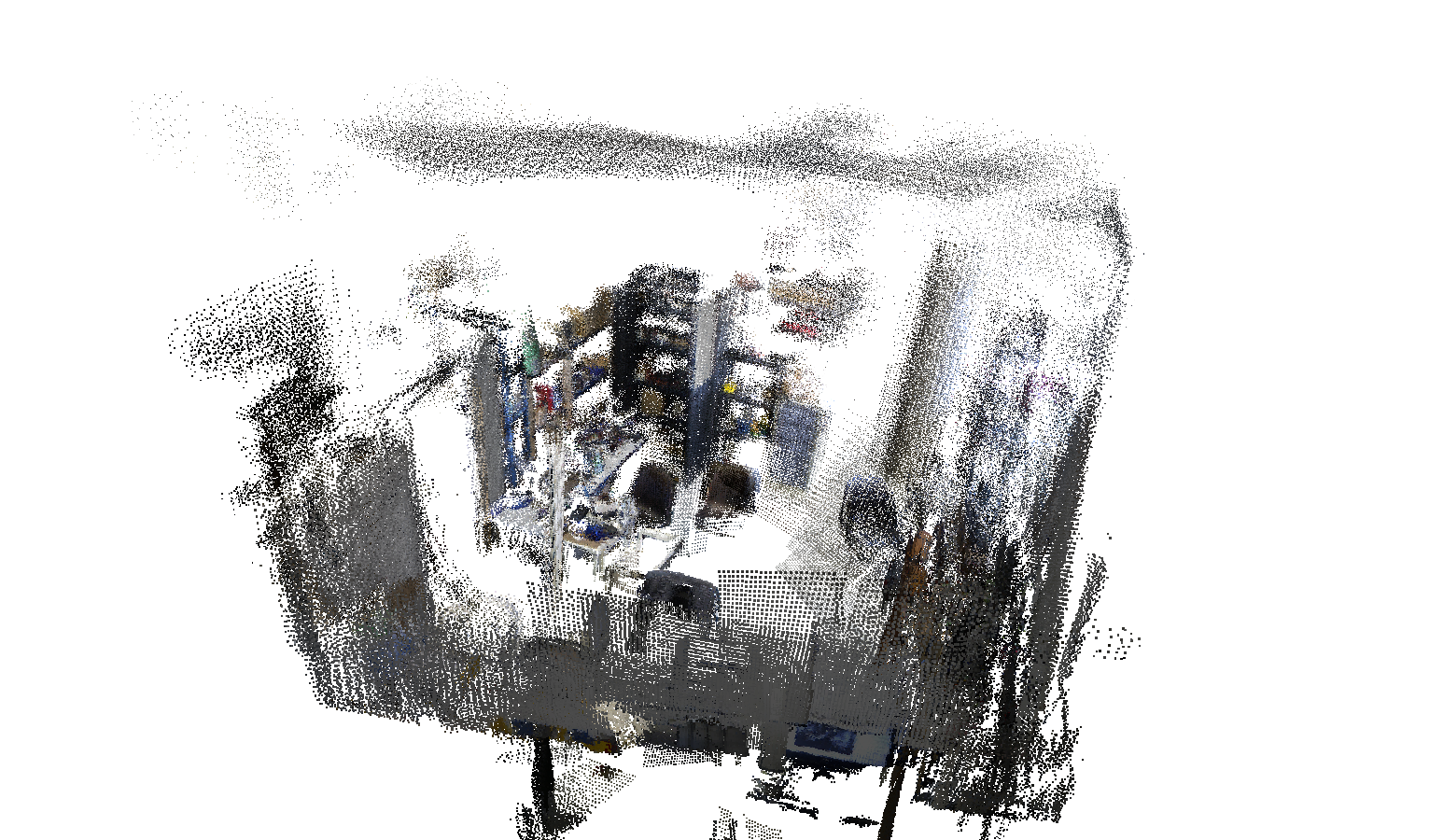
SLAM implementation for a rocker-bogie Martian style Rover under ROS - STILL IN DEVELOPEMENT
| Rocker-Bogie | RGBD-slam |
|---|---|
 |
 |
WORK IN PROGRESS
Required framework :
- ROS Kinetic
Required Hardware :
- Raspberry Pi 3
- Arduino MEGA 2560
- XBOX 360 Kinect
Required ROS packages :
- freenect_stack
- rosserial-arduino
Required libraries :
- OpenCV 3.4.0+
Clone the repository
git clone https://github.com/raymas/Rover.git
Please read CONTRIBUTING.md for details on our code of conduct, and the process for submitting pull requests to us.
- raymas - Initial work - raymas
See also the list of contributors who participated in this project.
This project is licensed under the GNU 3.0 License - see the LICENSE.md file for details