-
Notifications
You must be signed in to change notification settings - Fork 48
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
* raspicam_node cleanup Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * control cleanup Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * description cleanup Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * firmware cleanup Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * gazebo cleanup Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * nav cleanup Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * slam cleanup Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * README cleanup Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * clang format yaml parsable Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * add ignore and pre-commit Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * package.xml fix Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * pre-commit and gitignore Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * pre-commit Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * pre-commit Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> * README.md revert with updates Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com> --------- Signed-off-by: Aaryan Murgunde (Spectre Jammy) <aaryan.murgunde@gmail.com>
- Loading branch information
1 parent
ccc413e
commit b19dfa1
Showing
4 changed files
with
83 additions
and
8 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -17,7 +17,7 @@ build_isolated/ | |
| devel_isolated/ | ||
|
|
||
| #VS Code | ||
| .vscode | ||
| *.vscode | ||
|
|
||
| # Generated by dynamic reconfigure | ||
| *.cfgc | ||
|
|
||
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,10 +1,83 @@ | ||
| # Tortoisebot - ROS NOETIC | ||
| #  | ||
|
|
||
| Clone this repo in your src folder with the following command so as to also clone all the required submodules:: | ||
|  | ||
|  | ||
|  | ||
|  | ||
|  | ||
|
|
||
| --- | ||
| <p align="center"><a href="#connect-with-us-">Connect with Us</a> • <a href="#1-installation">Installation</a> • <a href="#2-setup">Setup</a> • <a href="#3-demos">Demos</a> | ||
|
|
||
| <h1 align="center"> TortoiseBot </h1> | ||
|
|
||
| # Connect with us  | ||
|
|
||
| <a href="https://rigbetellabs.com/"></a> | ||
| <a href="https://rigbetellabs.com/discord"></a> | ||
| <a href="https://www.youtube.com/channel/UCfIX89y8OvDIbEFZAAciHEA"></a> | ||
| <a href="https://www.instagram.com/rigbetellabs/"></a> | ||
| # 1. Installation | ||
| ## 1.1 Required Dependences: | ||
| ``` | ||
| sudo apt-get install ros-noetic-joy ros-noetic-teleop-twist-joy ros-noetic-teleop-twist-keyboard ros-noetic-amcl ros-noetic-map-server ros-noetic-move-base ros-noetic-urdf ros-noetic-xacro ros-noetic-rqt-image-view ros-noetic-gmapping ros-noetic-navigation ros-noetic-joint-state-publisher ros-noetic-robot-state-publisher ros-noetic-slam-gmapping ros-noetic-dwa-local-planner ros-noetic-joint-state-publisher-gui | ||
| ``` | ||
| ``` | ||
| cd ~/your workscpace | ||
| catkin_make | ||
| ``` | ||
| ## 1.2 Clone this repo | ||
| Make sure you clone the repo in your robot and your remote PC | ||
| ``` | ||
| git clone --recursive https://github.com/rigbetellabs/tortoisebot.git | ||
| ``` | ||
| Required Dependences: | ||
| ``` | ||
| sudo apt-get install ros-noetic-joy ros-noetic-teleop-twist-joy ros-noetic-teleop-twist-keyboard ros-noetic-amcl ros-noetic-map-server ros-noetic-move-base ros-noetic-urdf ros-noetic-xacro ros-noetic-rqt-image-view ros-noetic-gmapping ros-noetic-navigation ros-noetic-joint-state-publisher ros-noetic-robot-state-publisher ros-noetic-slam-gmapping ros-noetic-dwa-local-planner ros-noetic-joint-state-publisher-gui | ||
| cd ~/your workscpace | ||
| catkin_make | ||
| ``` | ||
| # 2. Setup | ||
| ### 2.1 Running on Simulation | ||
| - Run bringup.launch | ||
| - Run server_bringup.launch | ||
| ### SLAM | ||
| - slam.launch | ||
| ### Navigation | ||
| - navigation.launch | ||
| ### 2.2 Running on Real Robot | ||
| ### Running on ROBOT | ||
| - Run bringup.launch | ||
| ### Running on REMOTE PC | ||
| - Run server_bringup.launch | ||
| for SLAM | ||
| - slam.launch | ||
| for Nav | ||
| - navigation.launch | ||
|
|
||
| # 3. Demos | ||
|
|
||
| Simulation | Vizualisation of Sensors (Lidar,Odometery,Camera) | ||
| :-------------------------:|:-------------------------: | ||
| 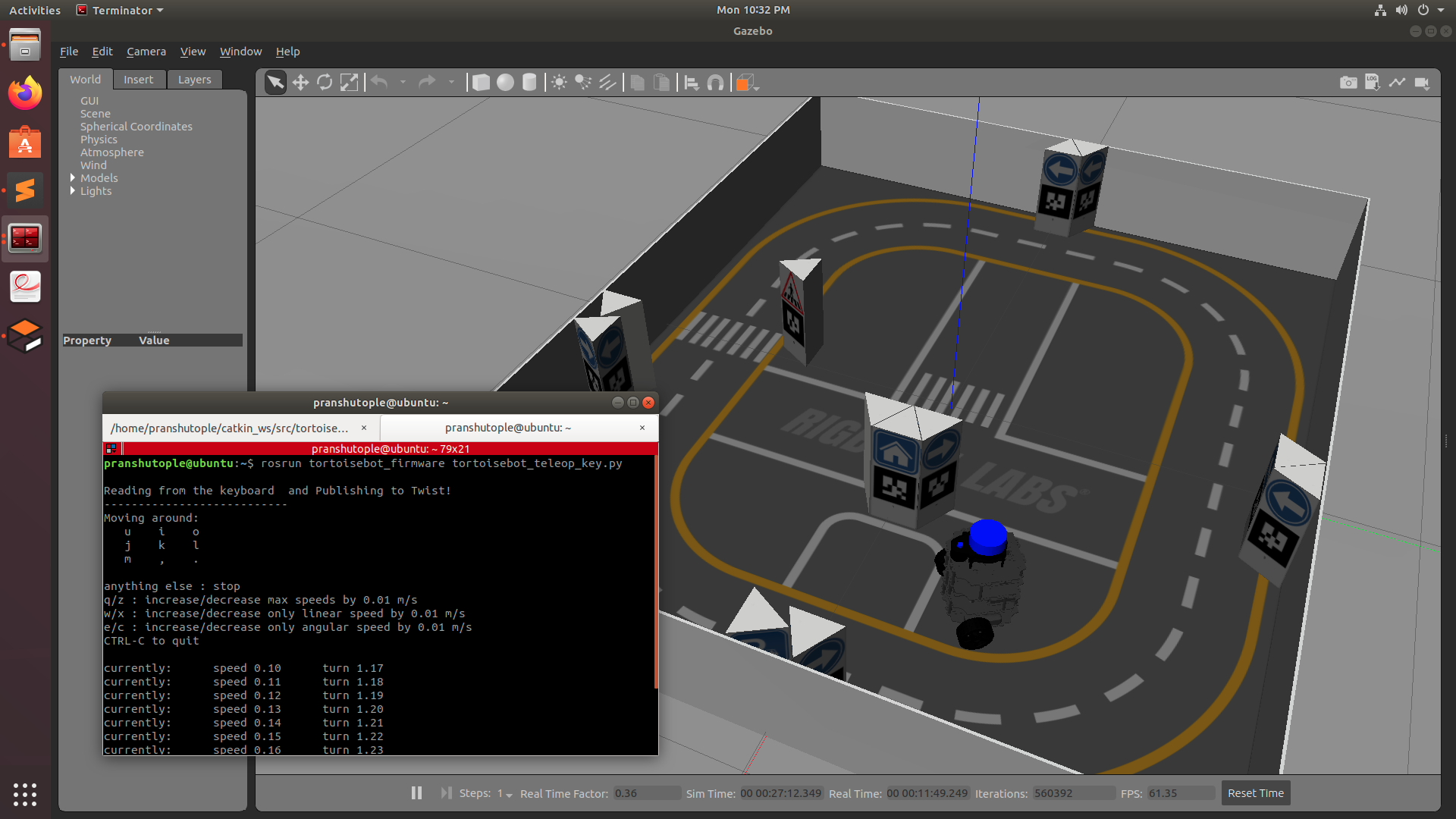 |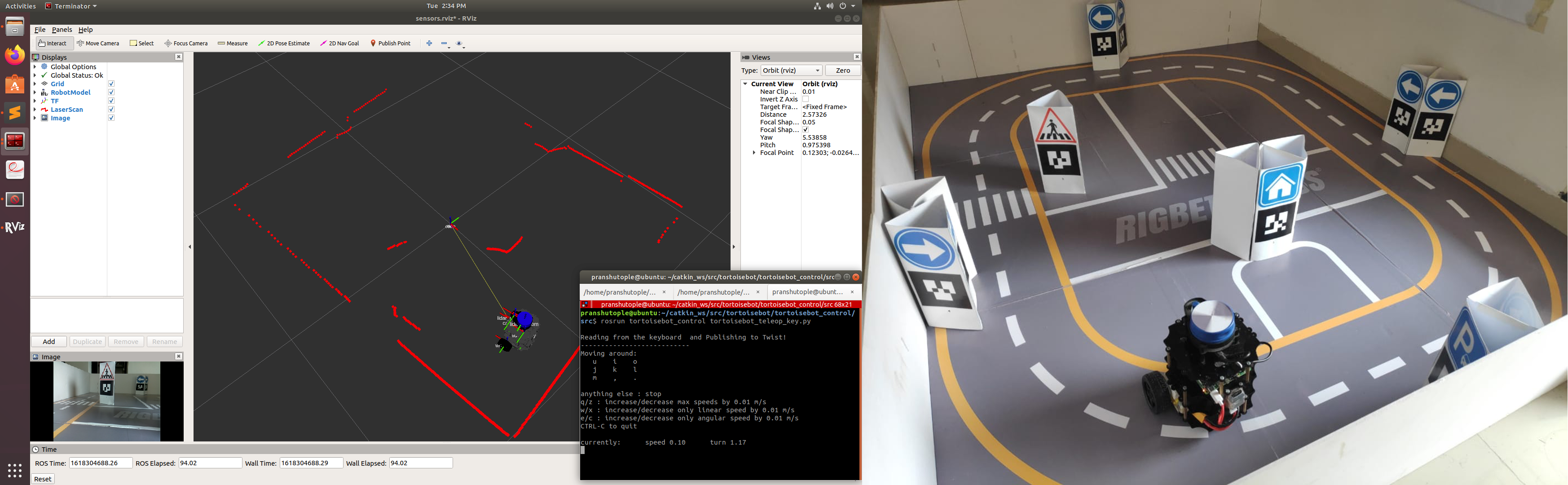 | ||
|
|
||
| Teleop | Mapping | Navigation | ||
| :-------------------------:|:-------------------------:|:-------------------------: | ||
| 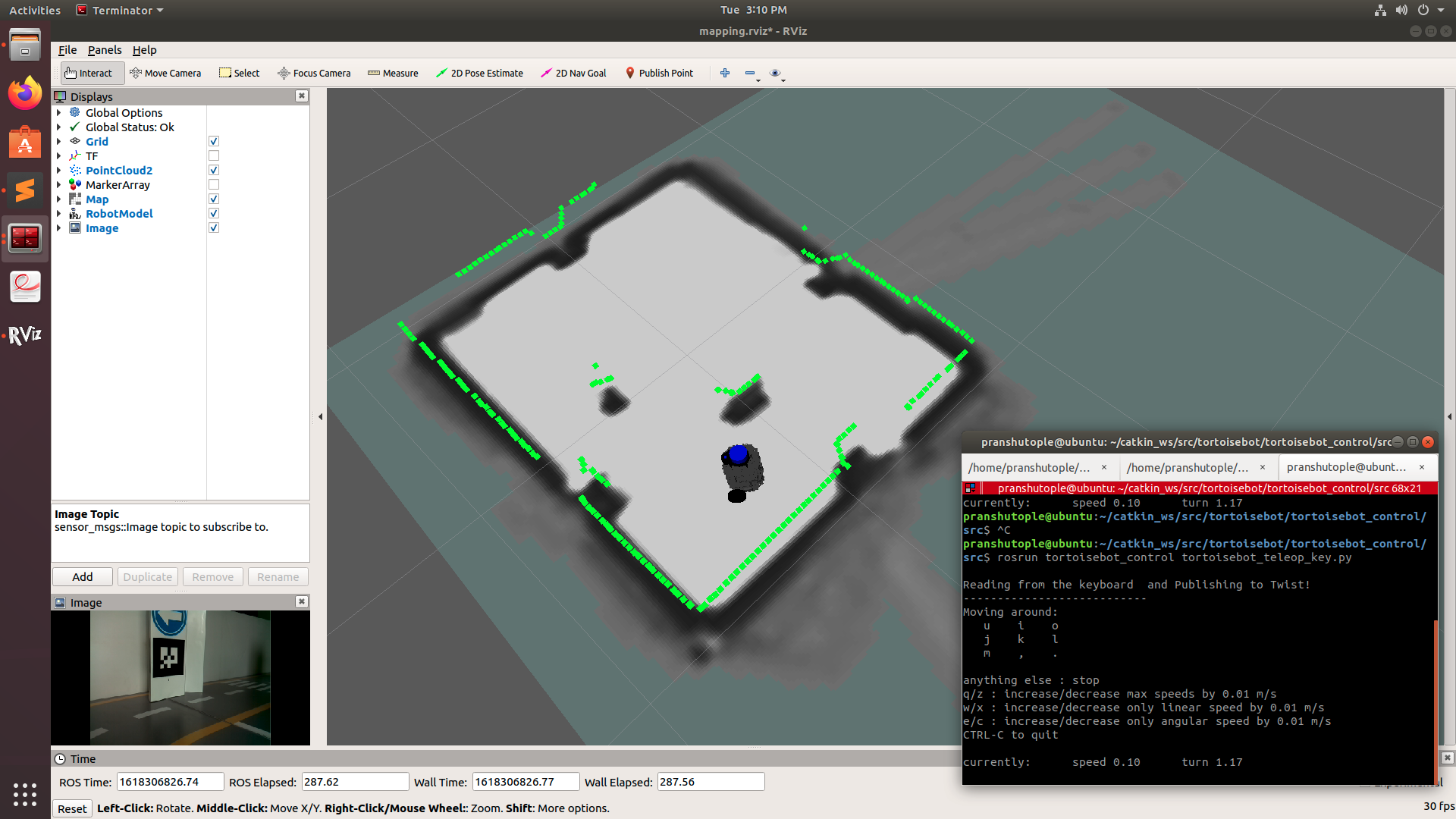 | 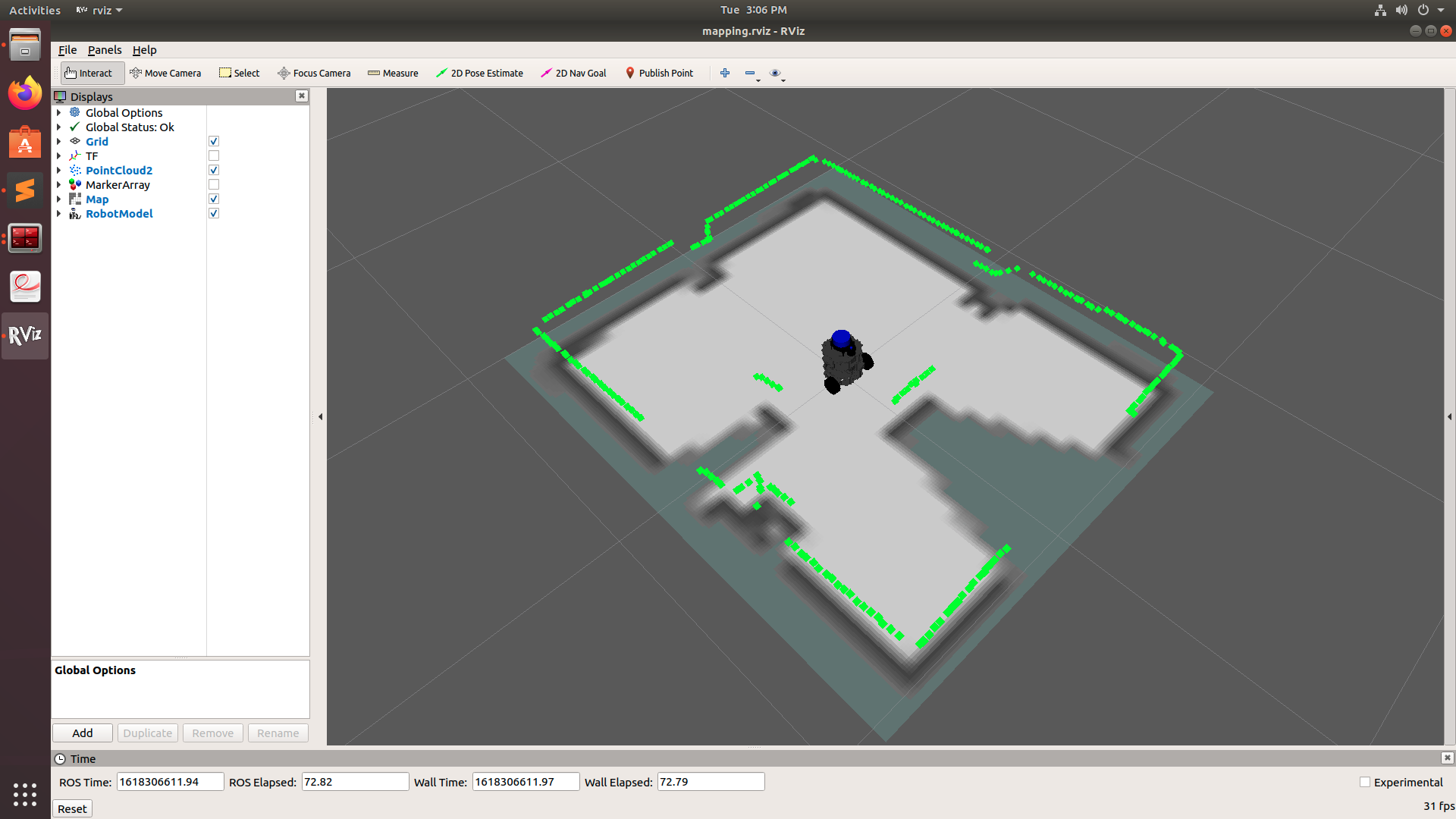 |  | ||
|
|
||
| # The TortoiseBot 🐢🤖 | ||
|
|
||
| The ReadMe is divided into several sections as per different topics and is constantly been updated and maintained with new updates by our talented and dedicated 👥 Team at RigBetel Labs LLP. So don't forget to often come here and check on it for the latest and greatest software updates, projects & skills for your TortoiseBot. Also don't forget to 🌟 Star this repository on top-right corner of the screen to show your 💖 Love and Support 🤗 for our Team. 🤩 It will make us happy and encourage us to make and bring more such projects for you. 😍 Click [here](https://github.com/rigbetellabs/tortoisebot/wiki/1.-Getting-Started) to get started. | ||
|
|
||
| 1. [Getting Started](https://github.com/rigbetellabs/tortoisebot/wiki/1.-Getting-Started) | ||
| 2. [Hardware Assembly](https://github.com/rigbetellabs/tortoisebot/wiki/2.-Hardware-Assembly) | ||
| 3. [TortoiseBot Setup](https://github.com/rigbetellabs/tortoisebot/wiki/3.-TortoiseBot-Setup) | ||
| 4. [Server PC Setup](https://github.com/rigbetellabs/tortoisebot/wiki/4.-Server-PC-Setup) | ||
| 5. [Running Demos](https://github.com/rigbetellabs/tortoisebot/wiki/5.-Running-Demos) | ||
|
|
||
| [Join](https://discord.gg/qDuCSMTjvN) our community for Free. Post your projects or ask questions if you need any help. | ||
|
|
||
|
|
||
| ## TortosieBot is sourced, assembled, made & maintained by our team 🧑🏻🤝🧑🏻 at<br> | ||
|
|
||
| RigBetel Labs LLP®, Charholi Bk., via. Loheagaon, Pune - 412105, MH, India 🇮🇳<br> | ||
| 🌐 [RigBetelLabs.com](https://rigbetellabs.com) 📞 [+91-8432152998](https://wa.me/918432152998) 📨 getintouch.rbl@gmail.com , info@rigbetellabs.com <br> | ||
| [LinkedIn](http://linkedin.com/company/rigbetellabs/) | [Instagram](http://instagram.com/rigbetellabs/) | [Facebook](http://facebook.com/rigbetellabs) | [Twitter](http://twitter.com/rigbetellabs) | [YouTube](https://www.youtube.com/channel/UCfIX89y8OvDIbEFZAAciHEA) | [Discord Community](https://discord.gg/qDuCSMTjvN) |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters