diff --git a/AsibotConfiguration_8hpp_source.html b/AsibotConfiguration_8hpp_source.html
new file mode 100644
index 000000000..ef5f8c36a
--- /dev/null
+++ b/AsibotConfiguration_8hpp_source.html
@@ -0,0 +1,224 @@
+
+
+
+
+
+
+
+kinematics-dynamics: libraries/YarpPlugins/AsibotSolver/AsibotConfiguration.hpp Source File
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __ASIBOT_CONFIGURATION_HPP__
+
4 #define __ASIBOT_CONFIGURATION_HPP__
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
34 : _qMin(qMin), _qMax(qMax)
+
+
+
+
+
57 virtual bool configure(
double q1,
double q2u,
double q2d,
double q3,
double q4u,
double q4d,
double q5);
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
89 : _q1(0.0), _q2(0.0), _q3(0.0), _q4(0.0), _q5(0.0), valid(true), _orient(FORWARD), _elb(UP)
+
+
+
+
+
+
+
+
+
+
+
104 double _q1, _q2, _q3, _q4, _q5;
+
+
+
+
+
+
+
+
+
+
+
+
116 Pose forwardElbowDown;
+
117 Pose reversedElbowUp;
+
118 Pose reversedElbowDown;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
174 : _qMin(qMin), _qMax(qMax)
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Base factory class for AsibotConfiguration.
Definition: AsibotConfiguration.hpp:158
+
AsibotConfigurationFactory(AsibotConfiguration::JointsIn qMin, AsibotConfiguration::JointsIn qMax)
Constructor.
Definition: AsibotConfiguration.hpp:173
+
virtual AsibotConfiguration * create() const =0
Creates an instance of the concrete class.
+
Implementation factory class for AsibotConfigurationLeastOverallAngularDisplacement.
Definition: AsibotConfiguration.hpp:187
+
AsibotConfiguration * create() const override
Creates an instance of the concrete class.
Definition: AsibotConfiguration.hpp:198
+
AsibotConfigurationLeastOverallAngularDisplacementFactory(AsibotConfiguration::JointsIn qMin, AsibotConfiguration::JointsIn qMax)
Constructor.
Definition: AsibotConfiguration.hpp:194
+
IK solver configuration strategy selector based on the overall angle displacement of all joints.
Definition: AsibotConfiguration.hpp:132
+
std::vector< double > getDiffs(JointsIn qGuess, const Pose &pose)
Obtains vector of differences between current and desired joint angles [deg].
Definition: AsibotConfigurationLeastOverallAngularDisplacement.cpp:85
+
AsibotConfigurationLeastOverallAngularDisplacement(JointsIn qMin, JointsIn qMax)
Constructor.
Definition: AsibotConfiguration.hpp:139
+
bool findOptimalConfiguration(JointsIn qGuess) override
Analyzes available configurations and selects the optimal one.
Definition: AsibotConfigurationLeastOverallAngularDisplacement.cpp:16
+
Abstract base class for a robot configuration strategy selector.
Definition: AsibotConfiguration.hpp:20
+
virtual ~AsibotConfiguration()=default
Destructor.
+
virtual bool findOptimalConfiguration(JointsIn qGuess)=0
Analyzes available configurations and selects the optimal one.
+
AsibotConfiguration(JointsIn qMin, JointsIn qMax)
Constructor.
Definition: AsibotConfiguration.hpp:33
+
virtual bool configure(double q1, double q2u, double q2d, double q3, double q4u, double q4d, double q5)
Stores initial values for a specific pose.
Definition: AsibotConfiguration.cpp:47
+
virtual void retrieveAngles(JointsOut q) const
Queries computed angles for the optimal configuration.
Definition: AsibotConfiguration.hpp:70
+
const std::vector< double > & JointsIn
Const vector of joint angles (input parameter).
Definition: AsibotConfiguration.hpp:23
+
std::vector< double > & JointsOut
Vector of joint angles (output parameter).
Definition: AsibotConfiguration.hpp:26
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
Helper class to store a specific robot configuration.
Definition: AsibotConfiguration.hpp:80
+
void retrieveAngles(JointsOut q) const
Returns stored angles.
Definition: AsibotConfiguration.cpp:126
+
bool checkJointsInLimits(JointsIn qMin, JointsIn qMax) const
Checks whether current configuration is reachable.
Definition: AsibotConfiguration.cpp:107
+
void storeAngles(double q1, double q2, double q3, double q4, double q5, orientation orient, elbow elb)
Initializes angle values (in degrees).
Definition: AsibotConfiguration.cpp:95
+
orientation
Orientation of axis 1 ('forward' or 180º offset).
Definition: AsibotConfiguration.hpp:82
+
Pose()
Constructor.
Definition: AsibotConfiguration.hpp:88
+
elbow
Orientation of axes 2-3 (elbow up/down).
Definition: AsibotConfiguration.hpp:85
+
std::string toString() const
Serializes stored data.
Definition: AsibotConfiguration.cpp:131
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __ASIBOT_SOLVER_HPP__
+
4 #define __ASIBOT_SOLVER_HPP__
+
+
+
+
+
9 #include <yarp/os/Searchable.h>
+
10 #include <yarp/dev/DeviceDriver.h>
+
11 #include <yarp/sig/Matrix.h>
+
+
13 #include "AsibotConfiguration.hpp"
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
43 bool appendLink(
const std::vector<double> &x)
override;
+
+
+
+
+
+
+
50 const std::vector<double> &x_new_old,
+
51 std::vector<double> &x_new_obj)
override;
+
+
+
54 bool fwdKin(
const std::vector<double> &q, std::vector<double> &x)
override;
+
+
+
57 bool poseDiff(
const std::vector<double> &xLhs,
const std::vector<double> &xRhs, std::vector<double> &xOut)
override;
+
+
+
60 bool invKin(
const std::vector<double> &xd,
const std::vector<double> &qGuess, std::vector<double> &q,
+
+
+
+
64 bool diffInvKin(
const std::vector<double> &q,
const std::vector<double> &xdot, std::vector<double> &qdot,
+
+
+
+
68 bool invDyn(
const std::vector<double> &q, std::vector<double> &t)
override;
+
+
+
71 bool invDyn(
const std::vector<double> &q,
const std::vector<double> &qdot,
const std::vector<double> &qdotdot,
+
72 const std::vector<double> &ftip, std::vector<double> &t,
reference_frame frame)
override;
+
+
+
75 bool open(yarp::os::Searchable& config)
override;
+
76 bool close()
override;
+
+
+
+
+
+
82 yarp::sig::Matrix frameTcp;
+
+
+
+
+
+
+
+
90 double A0, A1, A2, A3;
+
+
92 std::vector<double> qMin, qMax;
+
+
+
+
96 AsibotTcpFrame tcpFrameStruct;
+
+
98 mutable std::mutex mtx;
+
+
+
+
+
+
Contains roboticslab::ICartesianSolver.
+
Base factory class for AsibotConfiguration.
Definition: AsibotConfiguration.hpp:158
+
Abstract base class for a robot configuration strategy selector.
Definition: AsibotConfiguration.hpp:20
+
The AsibotSolver implements ICartesianSolver.
Definition: AsibotSolver.hpp:32
+
bool diffInvKin(const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame) override
Perform differential inverse kinematics.
Definition: ICartesianSolverImpl.cpp:421
+
bool fwdKin(const std::vector< double > &q, std::vector< double > &x) override
Perform forward kinematics.
Definition: ICartesianSolverImpl.cpp:240
+
bool restoreOriginalChain() override
Restore original kinematic chain.
Definition: ICartesianSolverImpl.cpp:216
+
int getNumTcps() override
Get number of TCPs for which the solver has been configured.
Definition: ICartesianSolverImpl.cpp:195
+
bool poseDiff(const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut) override
Obtain difference between supplied pose inputs.
Definition: ICartesianSolverImpl.cpp:288
+
bool invDyn(const std::vector< double > &q, std::vector< double > &t) override
Perform inverse dynamics.
Definition: ICartesianSolverImpl.cpp:487
+
bool invKin(const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame) override
Perform inverse kinematics.
Definition: ICartesianSolverImpl.cpp:314
+
bool changeOrigin(const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj) override
Change origin in which a pose is expressed.
Definition: ICartesianSolverImpl.cpp:227
+
int getNumJoints() override
Get number of joints for which the solver has been configured.
Definition: ICartesianSolverImpl.cpp:188
+
bool appendLink(const std::vector< double > &x) override
Append an additional link.
Definition: ICartesianSolverImpl.cpp:202
+
Abstract base class for a cartesian solver.
Definition: ICartesianSolver.h:23
+
reference_frame
Lists supported reference frames.
Definition: ICartesianSolver.h:27
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
Definition: AsibotSolver.hpp:80
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __BASIC_CARTESIAN_CONTROL_HPP__
+
4 #define __BASIC_CARTESIAN_CONTROL_HPP__
+
+
+
+
+
+
+
+
+
13 #include <yarp/os/PeriodicThread.h>
+
+
15 #include <yarp/dev/DeviceDriver.h>
+
16 #include <yarp/dev/PolyDriver.h>
+
17 #include <yarp/dev/ControlBoardInterfaces.h>
+
18 #include <yarp/dev/IPreciselyTimed.h>
+
+
20 #include <kdl/trajectory.hpp>
+
+
+
+
+
+
+
+
+
108 public yarp::os::PeriodicThread,
+
+
+
+
+
+
+
+
116 bool stat(std::vector<double> & x,
int * state =
nullptr,
double * timestamp =
nullptr)
override;
+
117 bool inv(
const std::vector<double> & xd, std::vector<double> & q)
override;
+
118 bool movj(
const std::vector<double> & xd)
override;
+
119 bool relj(
const std::vector<double> & xd)
override;
+
120 bool movl(
const std::vector<double> & xd)
override;
+
121 bool movv(
const std::vector<double> & xdotd)
override;
+
122 bool gcmp()
override;
+
123 bool forc(
const std::vector<double> &
fd)
override;
+
+
125 bool wait(
double timeout)
override;
+
126 bool tool(
const std::vector<double> & x)
override;
+
127 bool act(
int command)
override;
+
128 void pose(
const std::vector<double> & x)
override;
+
129 void twist(
const std::vector<double> & xdot)
override;
+
130 void wrench(
const std::vector<double> & w)
override;
+
+
+
133 bool setParameters(
const std::map<int, double> & params)
override;
+
+
+
+
+
+
+
140 bool open(yarp::os::Searchable & config)
override;
+
141 bool close()
override;
+
+
+
+
+
+
147 template <
typename Fn>
+
+
+
+
+
152 {
if (handler) handler(); }
+
+
154 void suppress()
const
+
155 { handler =
nullptr; }
+
+
+
158 mutable std::function<void()> handler;
+
+
+
161 int getCurrentState()
const;
+
162 void setCurrentState(
int value);
+
+
164 bool checkJointLimits(
const std::vector<double> & q);
+
165 bool checkJointLimits(
const std::vector<double> & q,
const std::vector<double> & qdot);
+
166 bool checkJointVelocities(
const std::vector<double> & qdot);
+
167 bool doFailFastChecks(
const std::vector<double> & initialQ);
+
168 bool checkControlModes(
int mode);
+
169 bool setControlModes(
int mode);
+
170 bool presetStreamingCommand(
int command);
+
171 bool computeIsocronousSpeeds(
const std::vector<double> & q,
const std::vector<double> & qd, std::vector<double> & qdot);
+
+
173 void handleMovj(
const std::vector<double> & q,
const StateWatcher & watcher);
+
174 void handleMovlVel(
const std::vector<double> & q,
const StateWatcher & watcher);
+
175 void handleMovlPosd(
const std::vector<double> & q,
const StateWatcher & watcher);
+
176 void handleMovv(
const std::vector<double> & q,
const StateWatcher & watcher);
+
177 void handleGcmp(
const std::vector<double> & q,
const StateWatcher & watcher);
+
178 void handleForc(
const std::vector<double> & q,
const std::vector<double> & qdot,
const std::vector<double> & qdotdot,
const StateWatcher & watcher);
+
+
180 yarp::dev::PolyDriver solverDevice;
+
+
+
183 yarp::dev::PolyDriver robotDevice;
+
184 yarp::dev::IControlMode * iControlMode {
nullptr};
+
185 yarp::dev::IEncoders * iEncoders {
nullptr};
+
186 yarp::dev::IPositionControl * iPositionControl {
nullptr};
+
187 yarp::dev::IPositionDirect * iPositionDirect {
nullptr};
+
188 yarp::dev::IPreciselyTimed * iPreciselyTimed {
nullptr};
+
189 yarp::dev::ITorqueControl * iTorqueControl {
nullptr};
+
190 yarp::dev::IVelocityControl * iVelocityControl {
nullptr};
+
+
+
+
+
+
+
+
+
+
+
201 int streamingCommand;
+
+
+
+
+
206 mutable std::mutex stateMutex;
+
+
+
+
+
+
+
+
218 std::vector<double>
fd;
+
+
220 int encoderErrors {0};
+
221 std::atomic_bool cmcSuccess;
+
+
223 std::vector<double> qMin, qMax;
+
224 std::vector<double> qdotMin, qdotMax;
+
225 std::vector<double> qRefSpeeds;
+
+
+
+
+
+
Contains roboticslab::ICartesianControl and related vocabs.
+
Contains roboticslab::ICartesianSolver.
+
Definition: BasicCartesianControl.hpp:145
+
The BasicCartesianControl class implements ICartesianControl.
Definition: BasicCartesianControl.hpp:110
+
bool act(int command) override
Actuate tool.
Definition: ICartesianControlImpl.cpp:421
+
bool movl(const std::vector< double > &xd) override
Linear move to target position.
Definition: ICartesianControlImpl.cpp:175
+
void wrench(const std::vector< double > &w) override
Exert force.
Definition: ICartesianControlImpl.cpp:515
+
std::vector< std::unique_ptr< KDL::Trajectory > > trajectories
Definition: BasicCartesianControl.hpp:215
+
bool tool(const std::vector< double > &x) override
Change tool.
Definition: ICartesianControlImpl.cpp:402
+
bool wait(double timeout) override
Wait until completion.
Definition: ICartesianControlImpl.cpp:373
+
std::vector< double > fd
Definition: BasicCartesianControl.hpp:218
+
double movementStartTime
Definition: BasicCartesianControl.hpp:212
+
bool stopControl() override
Stop control.
Definition: ICartesianControlImpl.cpp:348
+
bool getParameters(std::map< int, double > ¶ms) override
Retrieve multiple configuration parameters.
Definition: ICartesianControlImpl.cpp:693
+
bool getParameter(int vocab, double *value) override
Retrieve a configuration parameter.
Definition: ICartesianControlImpl.cpp:641
+
std::vector< double > vmoStored
Definition: BasicCartesianControl.hpp:209
+
void twist(const std::vector< double > &xdot) override
Instantaneous velocity steps.
Definition: ICartesianControlImpl.cpp:475
+
bool movj(const std::vector< double > &xd) override
Move in joint space, absolute coordinates.
Definition: ICartesianControlImpl.cpp:89
+
void pose(const std::vector< double > &x) override
Achieve pose.
Definition: ICartesianControlImpl.cpp:429
+
bool stat(std::vector< double > &x, int *state=nullptr, double *timestamp=nullptr) override
Current state and position.
Definition: ICartesianControlImpl.cpp:37
+
bool forc(const std::vector< double > &fd) override
Force control.
Definition: ICartesianControlImpl.cpp:320
+
bool movv(const std::vector< double > &xdotd) override
Linear move with given velocity.
Definition: ICartesianControlImpl.cpp:251
+
bool gcmp() override
Gravity compensation.
Definition: ICartesianControlImpl.cpp:306
+
bool relj(const std::vector< double > &xd) override
Move in joint space, relative coordinates.
Definition: ICartesianControlImpl.cpp:150
+
bool setParameters(const std::map< int, double > ¶ms) override
Set multiple configuration parameters.
Definition: ICartesianControlImpl.cpp:673
+
bool setParameter(int vocab, double value) override
Set a configuration parameter.
Definition: ICartesianControlImpl.cpp:573
+
bool inv(const std::vector< double > &xd, std::vector< double > &q) override
Inverse kinematics.
Definition: ICartesianControlImpl.cpp:68
+
Abstract base class for a cartesian controller.
Definition: ICartesianControl.h:146
+
Abstract base class for a cartesian solver.
Definition: ICartesianSolver.h:23
+
reference_frame
Lists supported reference frames.
Definition: ICartesianSolver.h:27
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __CARTESIAN_CONTROL_CLIENT_HPP__
+
4 #define __CARTESIAN_CONTROL_CLIENT_HPP__
+
+
+
+
8 #include <yarp/os/Bottle.h>
+
9 #include <yarp/os/BufferedPort.h>
+
10 #include <yarp/os/PortReaderBuffer.h>
+
11 #include <yarp/os/RpcClient.h>
+
+
13 #include <yarp/dev/Drivers.h>
+
+
+
+
+
+
+
+
+
+
+
+
+
37 void onRead(yarp::os::Bottle& b)
override;
+
38 bool getLastStatData(std::vector<double> &x,
int *state,
double * timestamp,
double timeout);
+
+
+
41 double localArrivalTime;
+
+
+
44 std::vector<double> x;
+
45 mutable std::mutex mtx;
+
+
+
+
+
+
+
+
57 bool stat(std::vector<double> &x,
int * state =
nullptr,
double * timestamp =
nullptr)
override;
+
58 bool inv(
const std::vector<double> &xd, std::vector<double> &q)
override;
+
59 bool movj(
const std::vector<double> &xd)
override;
+
60 bool relj(
const std::vector<double> &xd)
override;
+
61 bool movl(
const std::vector<double> &xd)
override;
+
62 bool movv(
const std::vector<double> &xdotd)
override;
+
+
64 bool forc(
const std::vector<double> &fd)
override;
+
+
66 bool wait(
double timeout)
override;
+
67 bool tool(
const std::vector<double> &x)
override;
+
68 bool act(
int command)
override;
+
69 void pose(
const std::vector<double> &x)
override;
+
70 void twist(
const std::vector<double> &xdot)
override;
+
71 void wrench(
const std::vector<double> &w)
override;
+
+
+
74 bool setParameters(
const std::map<int, double> & params)
override;
+
+
+
+
78 bool open(yarp::os::Searchable& config)
override;
+
79 bool close()
override;
+
+
+
82 bool handleRpcRunnableCmd(
int vocab);
+
83 bool handleRpcConsumerCmd(
int vocab,
const std::vector<double>& in);
+
84 bool handleRpcFunctionCmd(
int vocab,
const std::vector<double>& in, std::vector<double>& out);
+
+
86 void handleStreamingConsumerCmd(
int vocab,
const std::vector<double>& in);
+
87 void handleStreamingBiConsumerCmd(
int vocab,
const std::vector<double>& in1,
double in2);
+
+
89 yarp::os::RpcClient rpcClient;
+
90 yarp::os::BufferedPort<yarp::os::Bottle> fkInPort, commandPort;
+
+
+
93 double fkStreamTimeoutSecs;
+
+
+
+
+
+
Contains roboticslab::ICartesianControl and related vocabs.
+
The CartesianControlClient class implements ICartesianControl client side.
Definition: CartesianControlClient.hpp:54
+
bool stopControl() override
Stop control.
Definition: ICartesianControlImpl.cpp:237
+
bool forc(const std::vector< double > &fd) override
Force control.
Definition: ICartesianControlImpl.cpp:230
+
bool tool(const std::vector< double > &x) override
Change tool.
Definition: ICartesianControlImpl.cpp:258
+
void pose(const std::vector< double > &x) override
Achieve pose.
Definition: ICartesianControlImpl.cpp:279
+
bool movl(const std::vector< double > &xd) override
Linear move to target position.
Definition: ICartesianControlImpl.cpp:209
+
bool inv(const std::vector< double > &xd, std::vector< double > &q) override
Inverse kinematics.
Definition: ICartesianControlImpl.cpp:188
+
bool stat(std::vector< double > &x, int *state=nullptr, double *timestamp=nullptr) override
Current state and position.
Definition: ICartesianControlImpl.cpp:141
+
void twist(const std::vector< double > &xdot) override
Instantaneous velocity steps.
Definition: ICartesianControlImpl.cpp:286
+
bool gcmp() override
Gravity compensation.
Definition: ICartesianControlImpl.cpp:223
+
bool setParameter(int vocab, double value) override
Set a configuration parameter.
Definition: ICartesianControlImpl.cpp:300
+
bool relj(const std::vector< double > &xd) override
Move in joint space, relative coordinates.
Definition: ICartesianControlImpl.cpp:202
+
void wrench(const std::vector< double > &w) override
Exert force.
Definition: ICartesianControlImpl.cpp:293
+
bool getParameter(int vocab, double *value) override
Retrieve a configuration parameter.
Definition: ICartesianControlImpl.cpp:315
+
bool movv(const std::vector< double > &xdotd) override
Linear move with given velocity.
Definition: ICartesianControlImpl.cpp:216
+
bool movj(const std::vector< double > &xd) override
Move in joint space, absolute coordinates.
Definition: ICartesianControlImpl.cpp:195
+
bool setParameters(const std::map< int, double > ¶ms) override
Set multiple configuration parameters.
Definition: ICartesianControlImpl.cpp:336
+
bool getParameters(std::map< int, double > ¶ms) override
Retrieve multiple configuration parameters.
Definition: ICartesianControlImpl.cpp:357
+
bool act(int command) override
Actuate tool.
Definition: ICartesianControlImpl.cpp:265
+
bool wait(double timeout) override
Wait until completion.
Definition: ICartesianControlImpl.cpp:244
+
Responds to streaming FK messages.
Definition: CartesianControlClient.hpp:34
+
Abstract base class for a cartesian controller.
Definition: ICartesianControl.h:146
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __CARTESIAN_CONTROL_SERVER_HPP__
+
4 #define __CARTESIAN_CONTROL_SERVER_HPP__
+
+
+
+
8 #include <yarp/os/Bottle.h>
+
9 #include <yarp/os/BufferedPort.h>
+
10 #include <yarp/os/PeriodicThread.h>
+
11 #include <yarp/os/RpcServer.h>
+
+
13 #include <yarp/dev/Drivers.h>
+
14 #include <yarp/dev/PolyDriver.h>
+
+
+
17 #include "KinematicRepresentation.hpp"
+
+
+
+
+
+
30 class RpcTransformResponder;
+
31 class StreamResponder;
+
+
+
38 public yarp::os::PeriodicThread
+
+
+
+
+
+
+
+
46 bool open(yarp::os::Searchable & config)
override;
+
47 bool close()
override;
+
+
+
+
+
+
53 yarp::dev::PolyDriver cartesianControlDevice;
+
+
55 yarp::os::RpcServer rpcServer, rpcTransformServer;
+
56 yarp::os::BufferedPort<yarp::os::Bottle> fkOutPort, commandPort;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
75 : iCartesianControl(_iCartesianControl)
+
+
+
+
+
+
87 bool respond(
const yarp::os::Bottle & in, yarp::os::Bottle & out)
override;
+
+
+
+
+
95 virtual bool transformIncomingData(std::vector<double> & vin)
+
+
+
98 virtual bool transformOutgoingData(std::vector<double> & vout)
+
+
+
+
+
+
104 using FunctionFun = bool (
ICartesianControl::*)(
const std::vector<double> &, std::vector<double> &);
+
+
106 bool handleStatMsg(
const yarp::os::Bottle & in, yarp::os::Bottle & out);
+
107 bool handleWaitMsg(
const yarp::os::Bottle & in, yarp::os::Bottle & out);
+
108 bool handleActMsg(
const yarp::os::Bottle & in, yarp::os::Bottle & out);
+
+
110 bool handleRunnableCmdMsg(
const yarp::os::Bottle & in, yarp::os::Bottle & out, RunnableFun cmd);
+
111 bool handleConsumerCmdMsg(
const yarp::os::Bottle & in, yarp::os::Bottle & out, ConsumerFun cmd);
+
112 bool handleFunctionCmdMsg(
const yarp::os::Bottle & in, yarp::os::Bottle & out, FunctionFun cmd);
+
+
114 bool handleParameterSetter(
const yarp::os::Bottle & in, yarp::os::Bottle & out);
+
115 bool handleParameterGetter(
const yarp::os::Bottle & in, yarp::os::Bottle & out);
+
+
117 bool handleParameterSetterGroup(
const yarp::os::Bottle & in, yarp::os::Bottle & out);
+
118 bool handleParameterGetterGroup(
const yarp::os::Bottle & in, yarp::os::Bottle & out);
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
141 bool transformIncomingData(std::vector<double> & vin)
override;
+
142 bool transformOutgoingData(std::vector<double> & vout)
override;
+
+
+
+
+
+
+
+
+
+
+
157 : iCartesianControl(_iCartesianControl)
+
+
+
160 void onRead(yarp::os::Bottle & b)
override;
+
+
+
+
164 using BiConsumerFun = void (
ICartesianControl::*)(
const std::vector<double> &, double);
+
+
166 void handleConsumerCmdMsg(
const yarp::os::Bottle & in, ConsumerFun cmd);
+
167 void handleBiConsumerCmdMsg(
const yarp::os::Bottle & in, BiConsumerFun cmd);
+
+
+
+
+
+
+
+
Contains roboticslab::ICartesianControl and related vocabs.
+
The CartesianControlServer class implements ICartesianControl server side.
Definition: CartesianControlServer.hpp:39
+
Abstract base class for a cartesian controller.
Definition: ICartesianControl.h:146
+
Responds to RPC command messages.
Definition: CartesianControlServer.hpp:72
+
void makeUsage()
Definition: RpcResponder.cpp:91
+
bool respond(const yarp::os::Bottle &in, yarp::os::Bottle &out) override
Definition: RpcResponder.cpp:52
+
+
Responds to streaming command messages.
Definition: CartesianControlServer.hpp:154
+
coordinate_system
Lists available translational representations.
Definition: KinematicRepresentation.hpp:27
+
orientation_system
Lists available rotational representations.
Definition: KinematicRepresentation.hpp:36
+
angular_units
Lists recognized angular units.
Definition: KinematicRepresentation.hpp:48
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __CENTROID_TRANSFORM_HPP__
+
2 #define __CENTROID_TRANSFORM_HPP__
+
+
4 #include <yarp/os/Bottle.h>
+
5 #include <yarp/os/Stamp.h>
+
+
7 #include <kdl/frames.hpp>
+
+
9 #include "StreamingDevice.hpp"
+
+
+
+
+
14 class StreamingDevice;
+
+
+
+
+
+
+
+
29 { this->streamingDevice = streamingDevice; }
+
+
+
+
+
36 { this->permanenceTime = permanenceTime; }
+
+
+
+
+
+
+
+
46 double permanenceTime;
+
47 yarp::os::Bottle lastBottle;
+
48 yarp::os::Stamp lastAcquisition;
+
49 KDL::Rotation rot_tcp_camera;
+
+
+
+
+
+
+
+
+
+
+
+
+
Abstract class for a YARP streaming device.
Definition: StreamingDevice.hpp:46
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __CHAIN_FK_SOLVER_POS_ST_HPP__
+
4 #define __CHAIN_FK_SOLVER_POS_ST_HPP__
+
+
6 #include <kdl/chainfksolver.hpp>
+
+
8 #include "ProductOfExponentials.hpp"
+
+
+
+
+
+
+
+
33 int JntToCart(
const KDL::JntArray & q_in, KDL::Frame & p_out,
int segmentNr = -1)
override;
+
+
46 int JntToCart(
const KDL::JntArray & q_in, std::vector<KDL::Frame> & p_out,
int segmentNr = -1)
override;
+
+
+
+
65 const char *
strError(
const int error)
const override;
+
+
74 static KDL::ChainFkSolverPos *
create(
const KDL::Chain & chain);
+
+
+
+
+
+
+
+
+
85 const KDL::Chain & chain;
+
+
+
+
+
+
+
+
FK solver using Screw Theory.
Definition: ChainFkSolverPos_ST.hpp:22
+
void updateInternalDataStructures() override
Update the internal data structures.
Definition: ChainFkSolverPos_ST.cpp:40
+
static const int E_ILLEGAL_ARGUMENT_SIZE
Return code, input vector size does not match expected output vector size.
Definition: ChainFkSolverPos_ST.hpp:80
+
static const int E_OPERATION_NOT_SUPPORTED
Return code, operation not supported.
Definition: ChainFkSolverPos_ST.hpp:77
+
static KDL::ChainFkSolverPos * create(const KDL::Chain &chain)
Create an instance of ChainFkSolverPos_ST.
Definition: ChainFkSolverPos_ST.cpp:62
+
const char * strError(const int error) const override
Return a description of the last error.
Definition: ChainFkSolverPos_ST.cpp:47
+
int JntToCart(const KDL::JntArray &q_in, KDL::Frame &p_out, int segmentNr=-1) override
Perform FK on the selected segment.
Definition: ChainFkSolverPos_ST.cpp:16
+
Abstraction of a product of exponentials (POE) formula.
Definition: ProductOfExponentials.hpp:28
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __CHAIN_IK_SOLVER_POS_ID_HPP__
+
4 #define __CHAIN_IK_SOLVER_POS_ID_HPP__
+
+
6 #include <kdl/chain.hpp>
+
7 #include <kdl/chainfksolver.hpp>
+
8 #include <kdl/chainiksolver.hpp>
+
9 #include <kdl/chainjnttojacsolver.hpp>
+
10 #include <kdl/jacobian.hpp>
+
11 #include <kdl/jntarray.hpp>
+
+
+
+
+
+
+
+
36 ChainIkSolverPos_ID(
const KDL::Chain & chain,
const KDL::JntArray & q_min,
const KDL::JntArray & q_max, KDL::ChainFkSolverPos & fksolver);
+
+
48 int CartToJnt(
const KDL::JntArray & q_init,
const KDL::Frame & p_in, KDL::JntArray & q_out)
override;
+
+
+
+
67 const char *
strError(
const int error)
const override;
+
+
+
+
+
+
+
76 KDL::JntArray computeDiffInvKin(
const KDL::Twist & delta_twist);
+
+
78 const KDL::Chain & chain;
+
+
+
+
+
+
84 KDL::ChainFkSolverPos & fkSolverPos;
+
85 KDL::ChainJntToJacSolver jacSolver;
+
+
87 KDL::Jacobian jacobian;
+
+
+
+
+
+
IK solver using infinitesimal displacement twists.
Definition: ChainIkSolverPos_ID.hpp:25
+
void updateInternalDataStructures() override
Update the internal data structures.
Definition: ChainIkSolverPos_ID.cpp:107
+
static const int E_FKSOLVERPOS_FAILED
Return code, internal FK position solver failed.
Definition: ChainIkSolverPos_ID.hpp:70
+
static const int E_JACSOLVER_FAILED
Return code, internal Jacobian solver failed.
Definition: ChainIkSolverPos_ID.hpp:73
+
ChainIkSolverPos_ID(const KDL::Chain &chain, const KDL::JntArray &q_min, const KDL::JntArray &q_max, KDL::ChainFkSolverPos &fksolver)
Constructor.
Definition: ChainIkSolverPos_ID.cpp:16
+
int CartToJnt(const KDL::JntArray &q_init, const KDL::Frame &p_in, KDL::JntArray &q_out) override
Calculate inverse position kinematics.
Definition: ChainIkSolverPos_ID.cpp:29
+
const char * strError(const int error) const override
Return a description of the last error.
Definition: ChainIkSolverPos_ID.cpp:119
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __CHAIN_IK_SOLVER_POS_ST_HPP__
+
4 #define __CHAIN_IK_SOLVER_POS_ST_HPP__
+
+
6 #include <kdl/chainiksolver.hpp>
+
+
8 #include "ScrewTheoryIkProblem.hpp"
+
9 #include "ConfigurationSelector.hpp"
+
+
+
+
+
+
+
+
+
+
39 int CartToJnt(
const KDL::JntArray & q_init,
const KDL::Frame & p_in, KDL::JntArray & q_out)
override;
+
+
+
+
58 const char *
strError(
const int error)
const override;
+
+
+
+
+
+
+
+
+
+
+
+
+
83 const KDL::Chain & chain;
+
+
+
+
+
+
+
+
+
+
IK solver using Screw Theory.
Definition: ChainIkSolverPos_ST.hpp:24
+
static KDL::ChainIkSolverPos * create(const KDL::Chain &chain, const ConfigurationSelectorFactory &configFactory)
Create an instance of ChainIkSolverPos_ST.
Definition: ChainIkSolverPos_ST.cpp:82
+
static const int E_SOLUTION_NOT_FOUND
Return code, IK solution not found.
Definition: ChainIkSolverPos_ST.hpp:72
+
void updateInternalDataStructures() override
Update the internal data structures.
Definition: ChainIkSolverPos_ST.cpp:64
+
int CartToJnt(const KDL::JntArray &q_init, const KDL::Frame &p_in, KDL::JntArray &q_out) override
Calculate inverse position kinematics.
Definition: ChainIkSolverPos_ST.cpp:36
+
static const int E_OUT_OF_LIMITS
Return code, target pose out of robot limits.
Definition: ChainIkSolverPos_ST.hpp:75
+
virtual ~ChainIkSolverPos_ST()
Destructor.
Definition: ChainIkSolverPos_ST.cpp:25
+
static const int E_NOT_REACHABLE
Return code, solution out of reach.
Definition: ChainIkSolverPos_ST.hpp:78
+
const char * strError(const int error) const override
Return a description of the last error.
Definition: ChainIkSolverPos_ST.cpp:106
+
Base factory class for ConfigurationSelector.
Definition: ConfigurationSelector.hpp:183
+
Abstract base class for a robot configuration strategy selector.
Definition: ConfigurationSelector.hpp:20
+
Proxy IK problem solver class that iterates over a sequence of subproblems.
Definition: ScrewTheoryIkProblem.hpp:95
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __CONFIGURATION_SELECTOR_HPP__
+
4 #define __CONFIGURATION_SELECTOR_HPP__
+
+
+
+
8 #include <kdl/frames.hpp>
+
9 #include <kdl/jntarray.hpp>
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
44 virtual bool configure(
const std::vector<KDL::JntArray> & solutions);
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
79 void store(
const KDL::JntArray * q)
+
+
+
83 void validate(
const KDL::JntArray & qMin,
const KDL::JntArray & qMax);
+
+
+
+
+
+
+
+
+
+
+
+
98 const KDL::JntArray * q;
+
+
+
+
102 KDL::JntArray _qMin, _qMax;
+
+
104 Configuration optimalConfig;
+
+
106 std::vector<Configuration> configs;
+
+
+
+
+
+
+
+
132 lastValid(INVALID_CONFIG)
+
+
+
+
+
+
139 std::vector<double>
getDiffs(
const KDL::JntArray & qGuess,
const Configuration & config);
+
+
+
+
143 static const int INVALID_CONFIG = -1;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
201 : _qMin(qMin), _qMax(qMax)
+
+
+
204 KDL::JntArray _qMin, _qMax;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
255 if (_qMin.rows() == 6 && _qMax.rows() == 6)
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Base factory class for ConfigurationSelector.
Definition: ConfigurationSelector.hpp:183
+
ConfigurationSelectorFactory(const KDL::JntArray &qMin, const KDL::JntArray &qMax)
Constructor.
Definition: ConfigurationSelector.hpp:200
+
virtual ConfigurationSelector * create() const =0
Creates an instance of the concrete class.
+
Implementation factory class for ConfigurationSelectorHumanoidGait.
Definition: ConfigurationSelector.hpp:241
+
ConfigurationSelectorHumanoidGaitFactory(const KDL::JntArray &qMin, const KDL::JntArray &qMax)
Constructor.
Definition: ConfigurationSelector.hpp:249
+
ConfigurationSelector * create() const override
Creates an instance of the concrete class.
Definition: ConfigurationSelector.hpp:253
+
IK solver configuration strategy selector based on human walking.
Definition: ConfigurationSelector.hpp:155
+
bool applyConstraints(const Configuration &config)
Determines whether the configuration is valid according to this selector's premises.
Definition: ConfigurationSelectorHumanoidGait.cpp:29
+
bool findOptimalConfiguration(const KDL::JntArray &qGuess) override
Analyzes available configurations and selects the optimal one.
Definition: ConfigurationSelectorHumanoidGait.cpp:11
+
ConfigurationSelectorHumanoidGait(const KDL::JntArray &qMin, const KDL::JntArray &qMax)
Constructor.
Definition: ConfigurationSelector.hpp:163
+
Implementation factory class for ConfigurationSelectorLeastOverallAngularDisplacement.
Definition: ConfigurationSelector.hpp:215
+
ConfigurationSelector * create() const override
Creates an instance of the concrete class.
Definition: ConfigurationSelector.hpp:227
+
ConfigurationSelectorLeastOverallAngularDisplacementFactory(const KDL::JntArray &qMin, const KDL::JntArray &qMax)
Constructor.
Definition: ConfigurationSelector.hpp:223
+
IK solver configuration strategy selector based on the overall displacement of all joints.
Definition: ConfigurationSelector.hpp:122
+
ConfigurationSelectorLeastOverallAngularDisplacement(const KDL::JntArray &qMin, const KDL::JntArray &qMax)
Constructor.
Definition: ConfigurationSelector.hpp:130
+
std::vector< double > getDiffs(const KDL::JntArray &qGuess, const Configuration &config)
Obtains vector of differences between current and desired joint values.
Definition: ConfigurationSelectorLeastOverallAngularDisplacement.cpp:58
+
bool findOptimalConfiguration(const KDL::JntArray &qGuess) override
Analyzes available configurations and selects the optimal one.
Definition: ConfigurationSelectorLeastOverallAngularDisplacement.cpp:12
+
Helper class to store a specific robot configuration.
Definition: ConfigurationSelector.hpp:70
+
const KDL::JntArray * retrievePose() const
Retrieves stored joint values.
Definition: ConfigurationSelector.hpp:86
+
Configuration()
Constructor.
Definition: ConfigurationSelector.hpp:73
+
void validate(const KDL::JntArray &qMin, const KDL::JntArray &qMax)
Checks reachability against provided joint limits.
Definition: ConfigurationSelector.cpp:39
+
void store(const KDL::JntArray *q)
Initializes joint values.
Definition: ConfigurationSelector.hpp:79
+
bool isValid() const
Whether this configuration is attainable or not.
Definition: ConfigurationSelector.hpp:90
+
void invalidate()
Mark this configuration as invalid.
Definition: ConfigurationSelector.hpp:94
+
Abstract base class for a robot configuration strategy selector.
Definition: ConfigurationSelector.hpp:20
+
ConfigurationSelector(const KDL::JntArray &qMin, const KDL::JntArray &qMax)
Constructor.
Definition: ConfigurationSelector.hpp:28
+
virtual bool findOptimalConfiguration(const KDL::JntArray &qGuess)=0
Analyzes available configurations and selects the optimal one.
+
virtual ~ConfigurationSelector()=default
Destructor.
+
virtual bool configure(const std::vector< KDL::JntArray > &solutions)
Stores initial values for a specific pose.
Definition: ConfigurationSelector.cpp:21
+
virtual void retrievePose(KDL::JntArray &q) const
Queries computed joint values for the optimal configuration.
Definition: ConfigurationSelector.hpp:60
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __FT_COMPENSATION_HPP__
+
4 #define __FT_COMPENSATION_HPP__
+
+
6 #include <yarp/os/PeriodicThread.h>
+
7 #include <yarp/os/RFModule.h>
+
+
9 #include <yarp/dev/MultipleAnalogSensorsInterfaces.h>
+
10 #include <yarp/dev/PolyDriver.h>
+
+
12 #include <kdl/frames.hpp>
+
+
+
+
+
+
+
+
27 public yarp::os::PeriodicThread
+
+
+
+
31 : yarp::os::PeriodicThread(1.0, yarp::os::ShouldUseSystemClock::Yes, yarp::os::PeriodicThreadClock::Absolute)
+
+
+
+
+
+
37 bool configure(yarp::os::ResourceFinder & rf)
override;
+
38 bool updateModule()
override;
+
39 bool interruptModule()
override;
+
40 double getPeriod()
override;
+
41 bool close()
override;
+
+
+
+
+
+
47 bool readSensor(KDL::Wrench & wrench)
const;
+
48 bool compensateTool(KDL::Wrench & wrench)
const;
+
49 bool applyImpedance(KDL::Wrench & wrench);
+
+
51 yarp::dev::PolyDriver cartesianDevice;
+
+
+
+
55 yarp::dev::PolyDriver sensorDevice;
+
56 yarp::dev::ISixAxisForceTorqueSensors * sensor;
+
+
58 KDL::Rotation R_N_sensor;
+
59 KDL::Vector toolCoM_N;
+
60 KDL::Wrench toolWeight_0;
+
61 KDL::Wrench initialOffset;
+
62 KDL::Frame initialPose;
+
63 KDL::Frame previousPose;
+
+
+
66 cartesian_cmd command;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
82 double torqueDeadband;
+
+
+
+
+
+
Contains roboticslab::ICartesianControl and related vocabs.
+
Produces motion in the direction of an externally applied force measured by a force-torque sensor (pr...
Definition: FtCompensation.hpp:28
+
Abstract base class for a cartesian controller.
Definition: ICartesianControl.h:146
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __GRABBER_RESPONDER_HPP__
+
4 #define __GRABBER_RESPONDER_HPP__
+
+
6 #include <yarp/os/Bottle.h>
+
7 #include <yarp/os/PortReaderBuffer.h>
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
28 void onRead(yarp::os::Bottle &b)
override;
+
+
+
+
32 this->iCartesianControl = iCartesianControl;
+
+
+
35 void setNoApproachSetting(
bool noApproach)
+
+
37 this->noApproach = noApproach;
+
+
+
+
+
+
43 bool isStopped, noApproach;
+
+
+
+
+
+
Contains roboticslab::ICartesianControl and related vocabs.
+
Callback class for dealing with incoming grabber data streams.
Definition: GrabberResponder.hpp:21
+
Abstract base class for a cartesian controller.
Definition: ICartesianControl.h:146
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __HAAR_DETECTION_CONTROLLER_HPP__
+
4 #define __HAAR_DETECTION_CONTROLLER_HPP__
+
+
6 #include <yarp/os/BufferedPort.h>
+
7 #include <yarp/os/RFModule.h>
+
+
9 #include <yarp/dev/PolyDriver.h>
+
+
+
12 #include "IProximitySensors.h"
+
+
14 #include "GrabberResponder.hpp"
+
+
+
+
+
+
+
+
+
+
+
31 bool configure(yarp::os::ResourceFinder & rf)
override;
+
32 bool updateModule()
override;
+
33 bool interruptModule()
override;
+
34 bool close()
override;
+
35 double getPeriod()
override;
+
+
+
+
39 yarp::os::BufferedPort<yarp::os::Bottle> grabberPort;
+
+
41 yarp::dev::PolyDriver cartesianControlDevice;
+
+
+
44 yarp::dev::PolyDriver sensorsClientDevice;
+
45 roboticslab::IProximitySensors * iProximitySensors;
+
+
+
+
+
+
+
+
Contains roboticslab::ICartesianControl and related vocabs.
+
Callback class for dealing with incoming grabber data streams.
Definition: GrabberResponder.hpp:21
+
Create seek-and-follow trajectories based on Haar detection algorithms.
Definition: HaarDetectionController.hpp:26
+
Abstract base class for a cartesian controller.
Definition: ICartesianControl.h:146
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Contains roboticslab::ICartesianControl and related vocabs.
+More...
+
#include <map>
+
#include <vector>
+
#include <yarp/os/Vocab.h>
+
#include <ICartesianSolver.h>
+
+
Go to the source code of this file.
+
+ |
+| | roboticslab |
+| | The main, catch-all namespace for Robotics Lab UC3M.
|
+| |
+
+ |
+ |
+Used in acknowledge responses, configuration accessors, etc..
+ |
+|
+constexpr int | VOCAB_CC_OK = yarp::os::createVocab32('o','k') |
+| | Success.
|
+| |
+|
+constexpr int | VOCAB_CC_FAILED = yarp::os::createVocab32('f','a','i','l') |
+| | Failure.
|
+| |
+|
+constexpr int | VOCAB_CC_SET = yarp::os::createVocab32('s','e','t') |
+| | Setter.
|
+| |
+|
+constexpr int | VOCAB_CC_GET = yarp::os::createVocab32('g','e','t') |
+| | Getter.
|
+| |
+|
+constexpr int | VOCAB_CC_NOT_SET = yarp::os::createVocab32('n','s','e','t') |
+| | State: not set.
|
+| |
+ |
+ |
+|
+constexpr int | VOCAB_CC_STAT = yarp::os::createVocab32('s','t','a','t') |
+| | Current state and position.
|
+| |
+|
+constexpr int | VOCAB_CC_INV = yarp::os::createVocab32('i','n','v') |
+| | Inverse kinematics.
|
+| |
+|
+constexpr int | VOCAB_CC_MOVJ = yarp::os::createVocab32('m','o','v','j') |
+| | Move in joint space, absolute coordinates.
|
+| |
+|
+constexpr int | VOCAB_CC_RELJ = yarp::os::createVocab32('r','e','l','j') |
+| | Move in joint space, relative coordinates.
|
+| |
+|
+constexpr int | VOCAB_CC_MOVL = yarp::os::createVocab32('m','o','v','l') |
+| | Linear move to target position.
|
+| |
+|
+constexpr int | VOCAB_CC_MOVV = yarp::os::createVocab32('m','o','v','v') |
+| | Linear move with given velocity.
|
+| |
+|
+constexpr int | VOCAB_CC_GCMP = yarp::os::createVocab32('g','c','m','p') |
+| | Gravity compensation.
|
+| |
+|
+constexpr int | VOCAB_CC_FORC = yarp::os::createVocab32('f','o','r','c') |
+| | Force control.
|
+| |
+|
+constexpr int | VOCAB_CC_STOP = yarp::os::createVocab32('s','t','o','p') |
+| | Stop control.
|
+| |
+|
+constexpr int | VOCAB_CC_WAIT = yarp::os::createVocab32('w','a','i','t') |
+| | Wait motion done.
|
+| |
+|
+constexpr int | VOCAB_CC_TOOL = yarp::os::createVocab32('t','o','o','l') |
+| | Change tool.
|
+| |
+|
+constexpr int | VOCAB_CC_ACT = yarp::os::createVocab32('a','c','t') |
+| | Actuate tool.
|
+| |
+ |
+ |
+|
+constexpr int | VOCAB_CC_POSE = yarp::os::createVocab32('p','o','s','e') |
+| | Achieve pose.
|
+| |
+|
+constexpr int | VOCAB_CC_MOVI = yarp::os::createVocab32('m','o','v','i') |
+| |
+|
+constexpr int | VOCAB_CC_TWIST = yarp::os::createVocab32('t','w','s','t') |
+| | Instantaneous velocity steps.
|
+| |
+|
+constexpr int | VOCAB_CC_WRENCH = yarp::os::createVocab32('w','r','n','c') |
+| | Exert force.
|
+| |
+ |
+Used by roboticslab::ICartesianControl::stat to reflect current control state.
+ |
+|
+constexpr int | VOCAB_CC_NOT_CONTROLLING = yarp::os::createVocab32('c','c','n','c') |
+| | Not controlling.
|
+| |
+|
+constexpr int | VOCAB_CC_MOVJ_CONTROLLING = yarp::os::createVocab32('c','c','j','c') |
+| | Controlling MOVJ commands.
|
+| |
+|
+constexpr int | VOCAB_CC_MOVL_CONTROLLING = yarp::os::createVocab32('c','c','l','c') |
+| | Controlling MOVL commands.
|
+| |
+|
+constexpr int | VOCAB_CC_MOVV_CONTROLLING = yarp::os::createVocab32('c','c','v','c') |
+| | Controlling MOVV commands.
|
+| |
+|
+constexpr int | VOCAB_CC_GCMP_CONTROLLING = yarp::os::createVocab32('c','c','g','c') |
+| | Controlling GCMP commands.
|
+| |
+|
+constexpr int | VOCAB_CC_FORC_CONTROLLING = yarp::os::createVocab32('c','c','f','c') |
+| | Controlling FORC commands.
|
+| |
+ |
+
+ Used by roboticslab::ICartesianControl::act to control the actuator.
+ |
+|
+constexpr int | VOCAB_CC_ACTUATOR_NONE = yarp::os::createVocab32('a','c','n') |
+| | No actuator or no action.
|
+| |
+|
+constexpr int | VOCAB_CC_ACTUATOR_CLOSE_GRIPPER = yarp::os::createVocab32('a','c','c','g') |
+| | Close gripper.
|
+| |
+|
+constexpr int | VOCAB_CC_ACTUATOR_OPEN_GRIPPER = yarp::os::createVocab32('a','c','o','g') |
+| | Open gripper.
|
+| |
+|
+constexpr int | VOCAB_CC_ACTUATOR_STOP_GRIPPER = yarp::os::createVocab32('a','c','s','g') |
+| | Stop gripper.
|
+| |
+|
+constexpr int | VOCAB_CC_ACTUATOR_GENERIC = yarp::os::createVocab32('a','c','g') |
+| | Generic actuator.
|
+| |
+ |
+ |
+|
+constexpr int | VOCAB_CC_CONFIG_PARAMS = yarp::os::createVocab32('p','r','m','s') |
+| | Parameter group.
|
+| |
+|
+constexpr int | VOCAB_CC_CONFIG_GAIN = yarp::os::createVocab32('c','p','c','g') |
+| | Controller gain.
|
+| |
+|
+constexpr int | VOCAB_CC_CONFIG_TRAJ_DURATION = yarp::os::createVocab32('c','p','t','d') |
+| | Trajectory duration.
|
+| |
+|
+constexpr int | VOCAB_CC_CONFIG_CMC_PERIOD = yarp::os::createVocab32('c','p','c','p') |
+| | CMC period [ms].
|
+| |
+|
+constexpr int | VOCAB_CC_CONFIG_WAIT_PERIOD = yarp::os::createVocab32('c','p','w','p') |
+| | Check period of 'wait' command [ms].
|
+| |
+|
+constexpr int | VOCAB_CC_CONFIG_FRAME = yarp::os::createVocab32('c','p','f') |
+| | Reference frame.
|
+| |
+|
+constexpr int | VOCAB_CC_CONFIG_STREAMING_CMD = yarp::os::createVocab32('c','p','s','c') |
+| | Preset streaming command.
|
+| |
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Go to the documentation of this file.
+
+
3 #ifndef __I_CARTESIAN_CONTROL__
+
4 #define __I_CARTESIAN_CONTROL__
+
+
+
+
+
9 #include <yarp/os/Vocab.h>
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
77 #ifndef SWIG_PREPROCESSOR_SHOULD_SKIP_THIS
+
78 [[deprecated(
"use `VOCAB_CC_POSE` instead")]]
+
79 constexpr
int VOCAB_CC_MOVI = yarp::os::createVocab32(
'm',
'o',
'v',
'i');
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
175 virtual bool stat(std::vector<double> &x,
int * state =
nullptr,
double * timestamp =
nullptr) = 0;
+
+
189 virtual bool inv(
const std::vector<double> &xd, std::vector<double> &q) = 0;
+
+
205 virtual bool movj(
const std::vector<double> &xd) = 0;
+
+
221 virtual bool relj(
const std::vector<double> &xd) = 0;
+
+
234 virtual bool movl(
const std::vector<double> &xd) = 0;
+
+
247 virtual bool movv(
const std::vector<double> &xdotd) = 0;
+
+
+
+
269 virtual bool forc(
const std::vector<double> &fd) = 0;
+
+
+
+
291 virtual bool wait(
double timeout = 0.0) = 0;
+
+
304 virtual bool tool(
const std::vector<double> &x) = 0;
+
+
315 virtual bool act(
int command) = 0;
+
+
+
+
340 virtual void pose(
const std::vector<double> &x) = 0;
+
+
342 #ifndef SWIG_PREPROCESSOR_SHOULD_SKIP_THIS
+
343 [[deprecated(
"use `pose` instead")]]
+
344 virtual void movi(
const std::vector<double> &x)
+
+
+
+
+
+
359 virtual void twist(
const std::vector<double> &xdot) = 0;
+
+
369 virtual void wrench(
const std::vector<double> &w) = 0;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
constexpr int VOCAB_CC_STAT
Current state and position.
Definition: ICartesianControl.h:52
+
constexpr int VOCAB_CC_RELJ
Move in joint space, relative coordinates.
Definition: ICartesianControl.h:55
+
constexpr int VOCAB_CC_ACTUATOR_CLOSE_GRIPPER
Close gripper.
Definition: ICartesianControl.h:115
+
constexpr int VOCAB_CC_MOVJ
Move in joint space, absolute coordinates.
Definition: ICartesianControl.h:54
+
constexpr int VOCAB_CC_ACTUATOR_NONE
No actuator or no action.
Definition: ICartesianControl.h:114
+
constexpr int VOCAB_CC_TOOL
Change tool.
Definition: ICartesianControl.h:62
+
constexpr int VOCAB_CC_FORC
Force control.
Definition: ICartesianControl.h:59
+
constexpr int VOCAB_CC_FORC_CONTROLLING
Controlling FORC commands.
Definition: ICartesianControl.h:100
+
constexpr int VOCAB_CC_GCMP_CONTROLLING
Controlling GCMP commands.
Definition: ICartesianControl.h:99
+
constexpr int VOCAB_CC_CONFIG_TRAJ_DURATION
Trajectory duration.
Definition: ICartesianControl.h:131
+
constexpr int VOCAB_CC_GCMP
Gravity compensation.
Definition: ICartesianControl.h:58
+
constexpr int VOCAB_CC_SET
Setter.
Definition: ICartesianControl.h:37
+
constexpr int VOCAB_CC_CONFIG_PARAMS
Parameter group.
Definition: ICartesianControl.h:129
+
constexpr int VOCAB_CC_INV
Inverse kinematics.
Definition: ICartesianControl.h:53
+
constexpr int VOCAB_CC_CONFIG_FRAME
Reference frame.
Definition: ICartesianControl.h:134
+
constexpr int VOCAB_CC_ACTUATOR_STOP_GRIPPER
Stop gripper.
Definition: ICartesianControl.h:117
+
constexpr int VOCAB_CC_OK
Success.
Definition: ICartesianControl.h:35
+
constexpr int VOCAB_CC_GET
Getter.
Definition: ICartesianControl.h:38
+
constexpr int VOCAB_CC_WRENCH
Exert force.
Definition: ICartesianControl.h:82
+
constexpr int VOCAB_CC_NOT_SET
State: not set.
Definition: ICartesianControl.h:39
+
constexpr int VOCAB_CC_ACTUATOR_GENERIC
Generic actuator.
Definition: ICartesianControl.h:118
+
constexpr int VOCAB_CC_ACT
Actuate tool.
Definition: ICartesianControl.h:63
+
constexpr int VOCAB_CC_TWIST
Instantaneous velocity steps.
Definition: ICartesianControl.h:81
+
constexpr int VOCAB_CC_CONFIG_WAIT_PERIOD
Check period of 'wait' command [ms].
Definition: ICartesianControl.h:133
+
constexpr int VOCAB_CC_WAIT
Wait motion done.
Definition: ICartesianControl.h:61
+
constexpr int VOCAB_CC_FAILED
Failure.
Definition: ICartesianControl.h:36
+
constexpr int VOCAB_CC_NOT_CONTROLLING
Not controlling.
Definition: ICartesianControl.h:95
+
constexpr int VOCAB_CC_CONFIG_CMC_PERIOD
CMC period [ms].
Definition: ICartesianControl.h:132
+
constexpr int VOCAB_CC_MOVV_CONTROLLING
Controlling MOVV commands.
Definition: ICartesianControl.h:98
+
constexpr int VOCAB_CC_CONFIG_GAIN
Controller gain.
Definition: ICartesianControl.h:130
+
constexpr int VOCAB_CC_CONFIG_STREAMING_CMD
Preset streaming command.
Definition: ICartesianControl.h:135
+
constexpr int VOCAB_CC_MOVL_CONTROLLING
Controlling MOVL commands.
Definition: ICartesianControl.h:97
+
constexpr int VOCAB_CC_STOP
Stop control.
Definition: ICartesianControl.h:60
+
constexpr int VOCAB_CC_ACTUATOR_OPEN_GRIPPER
Open gripper.
Definition: ICartesianControl.h:116
+
constexpr int VOCAB_CC_POSE
Achieve pose.
Definition: ICartesianControl.h:76
+
constexpr int VOCAB_CC_MOVL
Linear move to target position.
Definition: ICartesianControl.h:56
+
constexpr int VOCAB_CC_MOVV
Linear move with given velocity.
Definition: ICartesianControl.h:57
+
constexpr int VOCAB_CC_MOVJ_CONTROLLING
Controlling MOVJ commands.
Definition: ICartesianControl.h:96
+
Contains roboticslab::ICartesianSolver.
+
Abstract base class for a cartesian controller.
Definition: ICartesianControl.h:146
+
virtual ~ICartesianControl()=default
Destructor.
+
virtual bool stat(std::vector< double > &x, int *state=nullptr, double *timestamp=nullptr)=0
Current state and position.
+
virtual bool act(int command)=0
Actuate tool.
+
virtual bool tool(const std::vector< double > &x)=0
Change tool.
+
virtual bool relj(const std::vector< double > &xd)=0
Move in joint space, relative coordinates.
+
virtual bool setParameter(int vocab, double value)=0
Set a configuration parameter.
+
virtual bool setParameters(const std::map< int, double > ¶ms)=0
Set multiple configuration parameters.
+
virtual bool getParameter(int vocab, double *value)=0
Retrieve a configuration parameter.
+
virtual bool movl(const std::vector< double > &xd)=0
Linear move to target position.
+
virtual bool wait(double timeout=0.0)=0
Wait until completion.
+
virtual void twist(const std::vector< double > &xdot)=0
Instantaneous velocity steps.
+
virtual bool gcmp()=0
Gravity compensation.
+
virtual bool movv(const std::vector< double > &xdotd)=0
Linear move with given velocity.
+
virtual bool inv(const std::vector< double > &xd, std::vector< double > &q)=0
Inverse kinematics.
+
virtual bool getParameters(std::map< int, double > ¶ms)=0
Retrieve multiple configuration parameters.
+
virtual void pose(const std::vector< double > &x)=0
Achieve pose.
+
virtual bool forc(const std::vector< double > &fd)=0
Force control.
+
virtual bool movj(const std::vector< double > &xd)=0
Move in joint space, absolute coordinates.
+
virtual bool stopControl()=0
Stop control.
+
virtual void wrench(const std::vector< double > &w)=0
Exert force.
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Contains roboticslab::ICartesianSolver.
+More...
+
#include <vector>
+#include <yarp/os/Vocab.h>
+
+
Go to the source code of this file.
+
+ |
+| | roboticslab |
+| | The main, catch-all namespace for Robotics Lab UC3M.
|
+| |
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Go to the documentation of this file.
+
+
3 #ifndef __I_CARTESIAN_SOLVER__
+
4 #define __I_CARTESIAN_SOLVER__
+
+
+
7 #include <yarp/os/Vocab.h>
+
+
+
+
+
+
+
+
+
+
+
29 TCP_FRAME = yarp::os::createVocab32(
'c',
'p',
'f',
't')
+
+
+
+
+
+
+
+
+
58 virtual bool appendLink(
const std::vector<double>& x) = 0;
+
+
+
+
+
83 const std::vector<double> &x_new_old,
+
84 std::vector<double> &x_new_obj) = 0;
+
+
96 virtual bool fwdKin(
const std::vector<double> &q, std::vector<double> &x) = 0;
+
+
116 virtual bool poseDiff(
const std::vector<double> &xLhs,
const std::vector<double> &xRhs, std::vector<double> &xOut) = 0;
+
+
130 virtual bool invKin(
const std::vector<double> &xd,
const std::vector<double> &qGuess, std::vector<double> &q,
+
+
+
145 virtual bool diffInvKin(
const std::vector<double> &q,
const std::vector<double> &xdot, std::vector<double> &qdot,
+
+
+
160 virtual bool invDyn(
const std::vector<double> &q, std::vector<double> &t) = 0;
+
+
162 #ifndef SWIG_PREPROCESSOR_SHOULD_SKIP_THIS
+
178 [[deprecated(
"use `const std::vector<double> &ftip` signature instead")]]
+
179 virtual bool invDyn(
const std::vector<double> &q,
const std::vector<double> &qdot,
const std::vector<double> &qdotdot,
+
180 const std::vector<std::vector<double>> &fexts, std::vector<double> &t)
+
+
182 return invDyn(q, qdot, qdotdot, fexts.back(), t);
+
+
+
+
202 virtual bool invDyn(
const std::vector<double> &q,
const std::vector<double> &qdot,
const std::vector<double> &qdotdot,
+
+
+
+
+
+
+
Abstract base class for a cartesian solver.
Definition: ICartesianSolver.h:23
+
virtual int getNumTcps()=0
Get number of TCPs for which the solver has been configured.
+
virtual bool appendLink(const std::vector< double > &x)=0
Append an additional link.
+
virtual bool invDyn(const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< double > &ftip, std::vector< double > &t, reference_frame frame=BASE_FRAME)=0
Perform inverse dynamics.
+
virtual bool fwdKin(const std::vector< double > &q, std::vector< double > &x)=0
Perform forward kinematics.
+
virtual bool restoreOriginalChain()=0
Restore original kinematic chain.
+
virtual bool invKin(const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame=BASE_FRAME)=0
Perform inverse kinematics.
+
virtual bool changeOrigin(const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj)=0
Change origin in which a pose is expressed.
+
virtual ~ICartesianSolver()=default
Destructor.
+
virtual bool diffInvKin(const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame=BASE_FRAME)=0
Perform differential inverse kinematics.
+
virtual bool invDyn(const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< std::vector< double >> &fexts, std::vector< double > &t)
Perform inverse dynamics.
Definition: ICartesianSolver.h:179
+
virtual int getNumJoints()=0
Get number of joints for which the solver has been configured.
+
reference_frame
Lists supported reference frames.
Definition: ICartesianSolver.h:27
+
@ TCP_FRAME
End-effector frame (TCP)
Definition: ICartesianSolver.h:29
+
@ BASE_FRAME
Base frame.
Definition: ICartesianSolver.h:28
+
virtual bool poseDiff(const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut)=0
Obtain difference between supplied pose inputs.
+
virtual bool invDyn(const std::vector< double > &q, std::vector< double > &t)=0
Perform inverse dynamics.
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __KDL_SOLVER_HPP__
+
4 #define __KDL_SOLVER_HPP__
+
+
+
+
8 #include <yarp/dev/DeviceDriver.h>
+
+
10 #include <kdl/chain.hpp>
+
11 #include <kdl/chainfksolver.hpp>
+
12 #include <kdl/chainiksolver.hpp>
+
13 #include <kdl/chainidsolver.hpp>
+
+
+
16 #include "LogComponent.hpp"
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
45 bool appendLink(
const std::vector<double>& x)
override;
+
+
+
+
+
+
+
52 const std::vector<double> &x_new_old,
+
53 std::vector<double> &x_new_obj)
override;
+
+
+
56 bool fwdKin(
const std::vector<double> &q, std::vector<double> &x)
override;
+
+
+
59 bool poseDiff(
const std::vector<double> &xLhs,
const std::vector<double> &xRhs, std::vector<double> &xOut)
override;
+
+
+
62 bool invKin(
const std::vector<double> &xd,
const std::vector<double> &qGuess, std::vector<double> &q,
+
+
+
+
66 bool diffInvKin(
const std::vector<double> &q,
const std::vector<double> &xdot, std::vector<double> &qdot,
+
+
+
+
70 bool invDyn(
const std::vector<double> &q, std::vector<double> &t)
override;
+
+
+
73 bool invDyn(
const std::vector<double> &q,
const std::vector<double> &qdot,
const std::vector<double> &qdotdot,
+
74 const std::vector<double> &ftip, std::vector<double> &t,
reference_frame frame)
override;
+
+
+
+
78 bool open(yarp::os::Searchable & config)
override;
+
79 bool close()
override;
+
+
+
82 inline const yarp::os::LogComponent & logc()
const
+
83 {
return !isQuiet ? KDLS() : KDLS_QUIET(); }
+
+
85 mutable std::mutex mtx;
+
+
+
+
+
+
93 KDL::ChainFkSolverPos * fkSolverPos {
nullptr};
+
94 KDL::ChainIkSolverPos * ikSolverPos {
nullptr};
+
95 KDL::ChainIkSolverVel * ikSolverVel {
nullptr};
+
96 KDL::ChainIdSolver * idSolver {
nullptr};
+
+
+
+
+
+
+
+
Contains roboticslab::ICartesianSolver.
+
Abstract base class for a cartesian solver.
Definition: ICartesianSolver.h:23
+
reference_frame
Lists supported reference frames.
Definition: ICartesianSolver.h:27
+
The KdlSolver class implements ICartesianSolver.
Definition: KdlSolver.hpp:34
+
bool restoreOriginalChain() override
Restore original kinematic chain.
Definition: ICartesianSolverImpl.cpp:51
+
bool invDyn(const std::vector< double > &q, std::vector< double > &t) override
Perform inverse dynamics.
Definition: ICartesianSolverImpl.cpp:225
+
bool poseDiff(const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut) override
Obtain difference between supplied pose inputs.
Definition: ICartesianSolverImpl.cpp:103
+
bool invKin(const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame) override
Perform inverse kinematics.
Definition: ICartesianSolverImpl.cpp:116
+
bool changeOrigin(const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj) override
Change origin in which a pose is expressed.
Definition: ICartesianSolverImpl.cpp:67
+
KDL::Chain chain
Definition: KdlSolver.hpp:88
+
int getNumJoints() override
Get number of joints for which the solver has been configured.
Definition: ICartesianSolverImpl.cpp:19
+
int getNumTcps() override
Get number of TCPs for which the solver has been configured.
Definition: ICartesianSolverImpl.cpp:26
+
bool diffInvKin(const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame) override
Perform differential inverse kinematics.
Definition: ICartesianSolverImpl.cpp:169
+
bool fwdKin(const std::vector< double > &q, std::vector< double > &x) override
Perform forward kinematics.
Definition: ICartesianSolverImpl.cpp:80
+
KDL::Chain originalChain
Definition: KdlSolver.hpp:91
+
bool appendLink(const std::vector< double > &x) override
Append an additional link.
Definition: ICartesianSolverImpl.cpp:33
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __KDL_TREE_SOLVER_HPP__
+
4 #define __KDL_TREE_SOLVER_HPP__
+
+
+
+
+
+
10 #include <yarp/dev/DeviceDriver.h>
+
+
12 #include <kdl/tree.hpp>
+
13 #include <kdl/treefksolver.hpp>
+
14 #include <kdl/treeiksolver.hpp>
+
15 #include <kdl/treeidsolver.hpp>
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
52 bool appendLink(
const std::vector<double> & x)
override;
+
+
+
+
+
+
+
59 const std::vector<double> & x_new_old,
+
60 std::vector<double> & x_new_obj)
override;
+
+
+
63 bool fwdKin(
const std::vector<double> & q, std::vector<double> & x)
override;
+
+
+
66 bool poseDiff(
const std::vector<double> & xLhs,
const std::vector<double> & xRhs, std::vector<double> & xOut)
override;
+
+
+
69 bool invKin(
const std::vector<double> & xd,
const std::vector<double> & qGuess, std::vector<double> & q,
+
+
+
+
73 bool diffInvKin(
const std::vector<double> & q,
const std::vector<double> & xdot, std::vector<double> & qdot,
+
+
+
+
77 bool invDyn(
const std::vector<double> & q, std::vector<double> & t)
override;
+
+
+
80 bool invDyn(
const std::vector<double> & q,
const std::vector<double> & qdot,
const std::vector<double> & qdotdot,
+
81 const std::vector<double> & ftip, std::vector<double> & t,
reference_frame frame)
override;
+
+
+
+
85 bool open(yarp::os::Searchable & config)
override;
+
+
87 bool close()
override;
+
+
+
90 std::vector<std::string> endpoints;
+
91 std::map<std::string, std::string> mergedEndpoints;
+
+
93 KDL::TreeFkSolverPos * fkSolverPos;
+
94 KDL::TreeIkSolverPos * ikSolverPos;
+
95 KDL::TreeIkSolverVel * ikSolverVel;
+
96 KDL::TreeIdSolver * idSolver;
+
+
+
+
+
+
Contains roboticslab::ICartesianSolver.
+
Abstract base class for a cartesian solver.
Definition: ICartesianSolver.h:23
+
reference_frame
Lists supported reference frames.
Definition: ICartesianSolver.h:27
+
The KdlTreeSolver class implements ICartesianSolver.
Definition: KdlTreeSolver.hpp:35
+
bool poseDiff(const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut) override
Obtain difference between supplied pose inputs.
Definition: ICartesianSolverImpl.cpp:103
+
bool invDyn(const std::vector< double > &q, std::vector< double > &t) override
Perform inverse dynamics.
Definition: ICartesianSolverImpl.cpp:262
+
bool diffInvKin(const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame) override
Perform differential inverse kinematics.
Definition: ICartesianSolverImpl.cpp:193
+
bool restoreOriginalChain() override
Restore original kinematic chain.
Definition: ICartesianSolverImpl.cpp:42
+
bool invKin(const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame) override
Perform inverse kinematics.
Definition: ICartesianSolverImpl.cpp:127
+
int getNumJoints() override
Get number of joints for which the solver has been configured.
Definition: ICartesianSolverImpl.cpp:20
+
bool fwdKin(const std::vector< double > &q, std::vector< double > &x) override
Perform forward kinematics.
Definition: ICartesianSolverImpl.cpp:73
+
bool appendLink(const std::vector< double > &x) override
Append an additional link.
Definition: ICartesianSolverImpl.cpp:34
+
int getNumTcps() override
Get number of TCPs for which the solver has been configured.
Definition: ICartesianSolverImpl.cpp:27
+
bool changeOrigin(const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj) override
Change origin in which a pose is expressed.
Definition: ICartesianSolverImpl.cpp:50
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __KDL_VECTOR_CONVERTER_HPP__
+
4 #define __KDL_VECTOR_CONVERTER_HPP__
+
+
+
+
8 #include <kdl/frames.hpp>
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Collection of utilities related to KDL and std::vector classes.
Definition: KdlVectorConverter.cpp:14
+
KDL::Frame vectorToFrame(const std::vector< double > &x)
Convert from std::vector<double> to KDL::Frame.
Definition: KdlVectorConverter.cpp:18
+
std::vector< double > frameToVector(const KDL::Frame &f)
Convert from KDL::Frame to std::vector<double>
Definition: KdlVectorConverter.cpp:41
+
KDL::Twist vectorToTwist(const std::vector< double > &xdot)
Convert from std::vector<double> to KDL::Twist.
Definition: KdlVectorConverter.cpp:60
+
KDL::Wrench vectorToWrench(const std::vector< double > &f)
Convert from std::vector<double> to KDL::Wrench.
Definition: KdlVectorConverter.cpp:100
+
std::vector< double > twistToVector(const KDL::Twist &t)
Convert from KDL::Twist to std::vector<double>
Definition: KdlVectorConverter.cpp:83
+
std::vector< double > wrenchToVector(const KDL::Wrench &w)
Convert from KDL::Wrench to std::vector<double>
Definition: KdlVectorConverter.cpp:123
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __KEYBOARD_CONTROLLER_HPP__
+
4 #define __KEYBOARD_CONTROLLER_HPP__
+
+
+
+
+
+
10 #include <yarp/os/RFModule.h>
+
11 #include <yarp/os/ResourceFinder.h>
+
+
13 #include <yarp/dev/PolyDriver.h>
+
14 #include <yarp/dev/IControlLimits.h>
+
15 #include <yarp/dev/IControlMode.h>
+
16 #include <yarp/dev/IEncoders.h>
+
17 #include <yarp/dev/IVelocityControl.h>
+
+
19 #include "LinearTrajectoryThread.hpp"
+
+
21 #include "KinematicRepresentation.hpp"
+
+
+
+
+
+
+
+
+
+
+
+
42 enum joint { Q1 = 0, Q2, Q3, Q4, Q5, Q6, Q7, Q8, Q9, MAX_JOINTS };
+
43 enum cart { X = 0, Y, Z, ROTX, ROTY, ROTZ, NUM_CART_COORDS };
+
+
45 bool configure(yarp::os::ResourceFinder & rf)
override;
+
46 bool updateModule()
override;
+
47 bool interruptModule()
override;
+
48 double getPeriod()
override;
+
49 bool close()
override;
+
+
+
52 enum control_modes { NOT_CONTROLLING, JOINT_MODE, CARTESIAN_MODE };
+
+
54 static const std::plus<double> increment_functor;
+
55 static const std::minus<double> decrement_functor;
+
+
57 template <
typename func>
+
58 void incrementOrDecrementJointVelocity(joint q, func op);
+
+
60 template <
typename func>
+
61 void incrementOrDecrementCartesianVelocity(cart coord, func op);
+
+
63 void toggleReferenceFrame();
+
+
65 void actuateTool(
int command);
+
+
67 void printJointPositions();
+
68 void printCartesianPositions();
+
+
+
+
+
+
+
+
+
+
78 std::string angleRepr;
+
+
80 control_modes controlMode {NOT_CONTROLLING};
+
+
82 bool usingThread {
false};
+
+
+
85 yarp::dev::PolyDriver controlBoardDevice;
+
86 yarp::dev::PolyDriver cartesianControlDevice;
+
+
88 yarp::dev::IEncoders * iEncoders {
nullptr};
+
89 yarp::dev::IControlMode * iControlMode {
nullptr};
+
90 yarp::dev::IControlLimits * iControlLimits {
nullptr};
+
91 yarp::dev::IVelocityControl * iVelocityControl {
nullptr};
+
+
+
+
95 std::vector<double> maxVelocityLimits;
+
96 std::vector<double> currentJointVels;
+
97 std::vector<double> currentCartVels;
+
+
+
+
+
+
Contains roboticslab::ICartesianControl and related vocabs.
+
constexpr int VOCAB_CC_ACTUATOR_NONE
No actuator or no action.
Definition: ICartesianControl.h:114
+
Abstract base class for a cartesian controller.
Definition: ICartesianControl.h:146
+
reference_frame
Lists supported reference frames.
Definition: ICartesianSolver.h:27
+
@ BASE_FRAME
Base frame.
Definition: ICartesianSolver.h:28
+
Sends streaming commands to the cartesian controller from a standard keyboard.
Definition: KeyboardController.hpp:36
+
Periodic thread that encapsulates a linear trajectory.
Definition: LinearTrajectoryThread.hpp:24
+
orientation_system
Lists available rotational representations.
Definition: KinematicRepresentation.hpp:36
+
@ AXIS_ANGLE
(axis_x, axis_y, axis_z, rotation angle) [axis needs not to be normalized]
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __KINEMATIC_REPRESENTATION_HPP__
+
4 #define __KINEMATIC_REPRESENTATION_HPP__
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
68 bool encodePose(
const std::vector<double> & x_in, std::vector<double> & x_out,
+
+
+
85 bool decodePose(
const std::vector<double> & x_in, std::vector<double> & x_out,
+
+
+
104 bool encodeVelocity(
const std::vector<double> & x_in,
const std::vector<double> & xdot_in,
+
+
+
+
124 bool decodeVelocity(
const std::vector<double> & x_in,
const std::vector<double> & xdot_in,
+
+
+
+
145 bool encodeAcceleration(
const std::vector<double> & x_in,
const std::vector<double> & xdot_in,
+
146 const std::vector<double> & xdotdot_in, std::vector<double> & xdotdot_out,
+
+
+
167 bool decodeAcceleration(
const std::vector<double> & x_in,
const std::vector<double> & xdot_in,
+
168 const std::vector<double> & xdotdot_in, std::vector<double> & xdotdot_out,
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Collection of static methods to perform geometric transformations.
Definition: KinematicRepresentation.cpp:72
+
coordinate_system
Lists available translational representations.
Definition: KinematicRepresentation.hpp:27
+
@ SPHERICAL
(radial distance, polar angle, azimuthal angle)
+
@ NONE
omit coordinate system in resulting combined coord+orient representation
+
@ CARTESIAN
(x distance, y distance, z distance)
+
@ CYLINDRICAL
(radial distance, azimuthal angle, height)
+
double radToDeg(double rad)
Converts radians to degrees.
Definition: KinematicRepresentation.cpp:523
+
bool encodePose(const std::vector< double > &x_in, std::vector< double > &x_out, coordinate_system coord, orientation_system orient, angular_units angle)
Converts the translation and rotation values of a specific pose to coordinate_system::CARTESIAN and o...
Definition: KinematicRepresentation.cpp:76
+
bool parseEnumerator(const std::string &str, coordinate_system *coord, coordinate_system fallback)
Parses input string, returns matching enumerator value.
Definition: KinematicRepresentation.cpp:530
+
double degToRad(double deg)
Converts degrees to radians.
Definition: KinematicRepresentation.cpp:516
+
bool encodeAcceleration(const std::vector< double > &x_in, const std::vector< double > &xdot_in, const std::vector< double > &xdotdot_in, std::vector< double > &xdotdot_out, coordinate_system coord, orientation_system orient, angular_units angle)
Converts the translation and rotation values of a specific acceleration to coordinate_system::CARTESI...
Definition: KinematicRepresentation.cpp:496
+
orientation_system
Lists available rotational representations.
Definition: KinematicRepresentation.hpp:36
+
@ RPY
fixed axes, roll is axis_x
+
@ EULER_YZ
as EULER_ZYZ, preceded by rotation about the azimuthal angle got from x-y coordinates
+
@ AXIS_ANGLE
(axis_x, axis_y, axis_z, rotation angle) [axis needs not to be normalized]
+
+
@ NONE
omit orientation system in resulting combined coord+orient representation
+
@ POLAR_AZIMUTH
(polar angle, azimuthal angle)
+
@ AXIS_ANGLE_SCALED
(axis_x, axis_y, axis_z) [axis' norm is the rotation angle]
+
bool decodeVelocity(const std::vector< double > &x_in, const std::vector< double > &xdot_in, std::vector< double > &xdot_out, coordinate_system coord, orientation_system orient, angular_units angle)
Converts the translation and rotation values of a specific velocity to the chosen representation syst...
Definition: KinematicRepresentation.cpp:403
+
angular_units
Lists recognized angular units.
Definition: KinematicRepresentation.hpp:48
+
+
+
bool encodeVelocity(const std::vector< double > &x_in, const std::vector< double > &xdot_in, std::vector< double > &xdot_out, coordinate_system coord, orientation_system orient, angular_units angle)
Converts the translation and rotation values of a specific velocity to coordinate_system::CARTESIAN a...
Definition: KinematicRepresentation.cpp:307
+
bool decodePose(const std::vector< double > &x_in, std::vector< double > &x_out, coordinate_system coord, orientation_system orient, angular_units angle)
Converts the translation and rotation values of a specific pose to the chosen representation systems.
Definition: KinematicRepresentation.cpp:187
+
bool decodeAcceleration(const std::vector< double > &x_in, const std::vector< double > &xdot_in, const std::vector< double > &xdotdot_in, std::vector< double > &xdotdot_out, coordinate_system coord, orientation_system orient, angular_units angle)
Converts the translation and rotation values of a specific acceleration to the chosen representation ...
Definition: KinematicRepresentation.cpp:506
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __LEAP_MOTION_SENSOR_DEVICE_HPP__
+
2 #define __LEAP_MOTION_SENSOR_DEVICE_HPP__
+
+
4 #include "StreamingDevice.hpp"
+
+
+
+
8 #include <kdl/frames.hpp>
+
+
10 #include <yarp/dev/IAnalogSensor.h>
+
+
+
+
+
+
+
+
+
+
+
+
29 bool initialize(
bool usingStreamingPreset)
override;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
43 yarp::dev::IAnalogSensor * iAnalogSensor;
+
+
+
+
47 std::vector<double> initialTcpOffset;
+
48 std::vector<double> initialLeapOffset;
+
+
50 KDL::Frame frame_base_leap, frame_ee_leap, frame_leap_ee;
+
+
52 KDL::Frame previousPose;
+
53 double previousTimestamp;
+
+
+
+
+
+
+
+
+
Represents a LeapMotion device wrapped as an analog sensor by YARP.
Definition: LeapMotionSensorDevice.hpp:22
+
void sendMovementCommand(double timestamp) override
Sends movement command to the cartesian controller.
Definition: LeapMotionSensorDevice.cpp:212
+
LeapMotionSensorDevice(yarp::os::Searchable &config, bool usingPose)
Constructor.
Definition: LeapMotionSensorDevice.cpp:18
+
bool transformData(double scaling) override
Performs required operations on stored data.
Definition: LeapMotionSensorDevice.cpp:141
+
bool initialize(bool usingStreamingPreset) override
Perform any custom initialization needed. This method is called after the successful creation of the ...
Definition: LeapMotionSensorDevice.cpp:59
+
int getActuatorState() override
If actuator command data is available, return its current state.
Definition: LeapMotionSensorDevice.cpp:178
+
bool acquireInterfaces() override
Acquires plugin interfaces.
Definition: LeapMotionSensorDevice.cpp:46
+
void stopMotion() override
Sends a movement command that would stop motion.
Definition: LeapMotionSensorDevice.hpp:39
+
bool acquireData() override
Acquires data from remote device.
Definition: LeapMotionSensorDevice.cpp:107
+
Abstract class for a YARP streaming device.
Definition: StreamingDevice.hpp:46
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __LINEAR_TRAJECTORY_THREAD_HPP__
+
4 #define __LINEAR_TRAJECTORY_THREAD_HPP__
+
+
+
+
+
9 #include <yarp/os/PeriodicThread.h>
+
+
11 #include <kdl/trajectory.hpp>
+
+
+
+
+
+
+
+
+
+
+
+
+
29 bool checkStreamingConfig();
+
30 bool configure(
const std::vector<double> & vels);
+
31 void useTcpFrame(
bool enableTcpFrame) { usingTcpFrame = enableTcpFrame; }
+
+
+
+
+
+
+
+
39 KDL::Trajectory * trajectory {
nullptr};
+
40 double startTime {0.0};
+
41 bool usingStreamingCommandConfig {
false};
+
42 bool usingTcpFrame {
false};
+
43 std::vector<double> deltaX;
+
44 mutable std::mutex mtx;
+
+
+
+
+
+
Contains roboticslab::ICartesianControl and related vocabs.
+
Abstract base class for a cartesian controller.
Definition: ICartesianControl.h:146
+
Periodic thread that encapsulates a linear trajectory.
Definition: LinearTrajectoryThread.hpp:24
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __MATRIX_EXPONENTIAL_HPP__
+
4 #define __MATRIX_EXPONENTIAL_HPP__
+
+
6 #include <kdl/frames.hpp>
+
+
+
+
+
+
+
+
+
+
+
+
+
+
36 MatrixExponential(
motion motionType,
const KDL::Vector & axis,
const KDL::Vector & origin = KDL::Vector::Zero());
+
+
45 KDL::Frame
asFrame(
double theta)
const;
+
+
+
53 {
return motionType; }
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Abstraction of a term in a product of exponentials (POE) formula.
Definition: MatrixExponential.hpp:19
+
MatrixExponential cloneWithBase(const KDL::Frame &H_new_old) const
Clones this instance and refers the internal coordinates of the screw to a different base.
Definition: MatrixExponential.cpp:70
+
motion
Lists available screw motion types.
Definition: MatrixExponential.hpp:23
+
@ TRANSLATION
Prismatic joint (infinite-pitch twist).
Definition: MatrixExponential.hpp:25
+
@ ROTATION
Revolute joint (zero-pitch twist).
Definition: MatrixExponential.hpp:24
+
KDL::Frame asFrame(double theta) const
Evaluates this term for the given magnitude of the screw.
Definition: MatrixExponential.cpp:36
+
const KDL::Vector & getOrigin() const
A point along the screw axis.
Definition: MatrixExponential.hpp:68
+
const KDL::Vector & getAxis() const
Screw axis.
Definition: MatrixExponential.hpp:60
+
motion getMotionType() const
Retrieves the motion type of this screw.
Definition: MatrixExponential.hpp:52
+
void changeBase(const KDL::Frame &H_new_old)
Refers the internal coordinates of this screw to a different base.
Definition: MatrixExponential.cpp:58
+
MatrixExponential(motion motionType, const KDL::Vector &axis, const KDL::Vector &origin=KDL::Vector::Zero())
Constructor.
Definition: MatrixExponential.cpp:26
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __PRODUCT_OF_EXPONENTIALS_HPP__
+
4 #define __PRODUCT_OF_EXPONENTIALS_HPP__
+
+
+
+
8 #include <kdl/chain.hpp>
+
9 #include <kdl/frames.hpp>
+
10 #include <kdl/jntarray.hpp>
+
+
12 #include "MatrixExponential.hpp"
+
+
+
+
+
+
+
+
35 explicit PoeExpression(
const KDL::Frame & H_S_T = KDL::Frame::Identity()) : H_S_T(H_S_T) {}
+
+
+
+
+
61 void append(
const PoeExpression & poe,
const KDL::Frame & H_new_old = KDL::Frame::Identity());
+
+
+
+
+
+
77 {
return exps.size(); }
+
+
+
87 {
return exps.at(i); }
+
+
+
+
+
105 { H_S_T = H_S_T * H_new_old; }
+
+
116 bool evaluate(
const KDL::JntArray & q, KDL::Frame & H)
const;
+
+
+
+
+
+
+
+
+
+
+
161 std::vector<MatrixExponential> exps;
+
+
+
+
+
+
+
Abstraction of a term in a product of exponentials (POE) formula.
Definition: MatrixExponential.hpp:19
+
MatrixExponential cloneWithBase(const KDL::Frame &H_new_old) const
Clones this instance and refers the internal coordinates of the screw to a different base.
Definition: MatrixExponential.cpp:70
+
Abstraction of a product of exponentials (POE) formula.
Definition: ProductOfExponentials.hpp:28
+
KDL::Chain toChain() const
Makes a KDL::Chain from this instance.
Definition: ProductOfExponentials.cpp:138
+
void reverseSelf()
Inverts this POE formula.
Definition: ProductOfExponentials.cpp:104
+
bool evaluate(const KDL::JntArray &q, KDL::Frame &H) const
Performs forward kinematics.
Definition: ProductOfExponentials.cpp:82
+
static PoeExpression fromChain(const KDL::Chain &chain)
Builds a PoeExpression from a KDL::Chain.
Definition: ProductOfExponentials.cpp:167
+
void changeBaseFrame(const KDL::Frame &H_new_old)
Refers the internal coordinates of this POE to a different base.
Definition: ProductOfExponentials.cpp:70
+
const MatrixExponential & exponentialAtJoint(int i) const
Retrieves a term of the POE formula.
Definition: ProductOfExponentials.hpp:86
+
const KDL::Frame & getTransform() const
Retrieves the transformation between base and tool frames.
Definition: ProductOfExponentials.hpp:68
+
void append(const MatrixExponential &exp, const KDL::Frame &H_new_old=KDL::Frame::Identity())
Appends a new term to this POE formula.
Definition: ProductOfExponentials.hpp:47
+
int size() const
Size of this POE.
Definition: ProductOfExponentials.hpp:76
+
PoeExpression(const KDL::Frame &H_S_T=KDL::Frame::Identity())
Constructor.
Definition: ProductOfExponentials.hpp:35
+
PoeExpression makeReverse() const
Creates a new POE entity from the inverse of this POE formula.
Definition: ProductOfExponentials.cpp:118
+
void changeToolFrame(const KDL::Frame &H_new_old)
Updates the tool frame.
Definition: ProductOfExponentials.hpp:104
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __SCREW_THEORY_IK_PROBLEM_HPP__
+
4 #define __SCREW_THEORY_IK_PROBLEM_HPP__
+
+
+
+
+
9 #include <kdl/frames.hpp>
+
10 #include <kdl/jntarray.hpp>
+
+
12 #include "ProductOfExponentials.hpp"
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
98 using Steps = std::vector<const ScrewTheoryIkSubproblem *>;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
151 using Frames = std::vector<KDL::Frame>;
+
152 using PoeTerms = std::vector<poe_term>;
+
+
+
155 ScrewTheoryIkProblem(
const PoeExpression & poe,
const Steps & steps,
bool reversed);
+
+
157 void recalculateFrames(
const Solutions &
solutions, Frames & frames, PoeTerms & poeTerms);
+
158 bool recalculateFrames(
const Solutions &
solutions, Frames & frames, PoeTerms & poeTerms,
bool backwards);
+
+
160 KDL::Frame transformPoint(
const KDL::JntArray & jointValues,
const PoeTerms & poeTerms);
+
+
162 const PoeExpression poe;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
188 PoeTerm() : known(
false), simplified(
false) {}
+
189 bool known, simplified;
+
+
+
+
+
+
+
+
207 static std::vector<KDL::Vector> searchPoints(
const PoeExpression & poe);
+
+
+
+
211 void refreshSimplificationState();
+
+
213 void simplify(
int depth);
+
214 void simplifyWithPadenKahanOne(
const KDL::Vector & point);
+
215 void simplifyWithPadenKahanThree(
const KDL::Vector & point);
+
216 void simplifyWithPardosOne();
+
+
+
+
+
+
222 std::vector<KDL::Vector> points;
+
223 std::vector<KDL::Vector> testPoints;
+
+
225 std::vector<PoeTerm> poeTerms;
+
+
227 static const int MAX_SIMPLIFICATION_DEPTH = 2;
+
+
+
+
+
+
Abstraction of a product of exponentials (POE) formula.
Definition: ProductOfExponentials.hpp:28
+
Automated IK solution finder.
Definition: ScrewTheoryIkProblem.hpp:183
+
ScrewTheoryIkProblem * build()
Finds a valid sequence of geometric subproblems that solve a global IK problem.
Definition: ScrewTheoryIkProblemBuilder.cpp:231
+
ScrewTheoryIkProblemBuilder(const PoeExpression &poe)
Constructor.
Definition: ScrewTheoryIkProblemBuilder.cpp:144
+
Proxy IK problem solver class that iterates over a sequence of subproblems.
Definition: ScrewTheoryIkProblem.hpp:95
+
static ScrewTheoryIkProblem * create(const PoeExpression &poe, const Steps &steps, bool reversed=false)
Creates an IK solver instance given a sequence of known subproblems.
Definition: ScrewTheoryIkProblem.cpp:265
+
const Steps & getSteps() const
Solution of the IK problem (if available)
Definition: ScrewTheoryIkProblem.hpp:125
+
bool solve(const KDL::Frame &H_S_T, Solutions &solutions)
Find all available solutions.
Definition: ScrewTheoryIkProblem.cpp:62
+
std::vector< KDL::JntArray > Solutions
Collection of global IK solutions.
Definition: ScrewTheoryIkProblem.hpp:101
+
~ScrewTheoryIkProblem()
Destructor.
Definition: ScrewTheoryIkProblem.cpp:52
+
bool isReversed() const
Whether the computed solution is reversed.
Definition: ScrewTheoryIkProblem.hpp:129
+
std::vector< const ScrewTheoryIkSubproblem * > Steps
Ordered sequence of IK subproblems needed to solve a IK problem.
Definition: ScrewTheoryIkProblem.hpp:98
+
int solutions() const
Number of global IK solutions.
Definition: ScrewTheoryIkProblem.hpp:121
+
Interface shared by all IK subproblems found in Screw Theory applied to Robotics.
Definition: ScrewTheoryIkProblem.hpp:26
+
std::vector< JointIdsToSolutions > Solutions
Collection of local IK solutions.
Definition: ScrewTheoryIkProblem.hpp:35
+
std::vector< JointIdToSolution > JointIdsToSolutions
At least one joint-id+value pair per solution.
Definition: ScrewTheoryIkProblem.hpp:32
+
virtual int solutions() const =0
Number of local IK solutions.
+
virtual ~ScrewTheoryIkSubproblem()=default
Destructor.
+
virtual bool solve(const KDL::Frame &rhs, const KDL::Frame &pointTransform, Solutions &solutions) const =0
Finds a closed geometric solution for this IK subproblem.
+
virtual const char * describe() const =0
Return a human-readable description of this IK subproblem.
+
std::pair< int, double > JointIdToSolution
Maps a joint id to a screw magnitude.
Definition: ScrewTheoryIkProblem.hpp:29
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
Helper structure that holds the state of a POE term.
Definition: ScrewTheoryIkProblem.hpp:187
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __SCREW_THEORY_IK_SUBPROBLEMS_HPP__
+
4 #define __SCREW_THEORY_IK_SUBPROBLEMS_HPP__
+
+
6 #include <kdl/frames.hpp>
+
+
8 #include "ScrewTheoryIkProblem.hpp"
+
9 #include "MatrixExponential.hpp"
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
47 const KDL::Rotation axisPow;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
85 const KDL::Vector p, r, axesCross;
+
86 const KDL::Rotation axisPow1, axisPow2;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
123 const KDL::Vector p, k;
+
124 const KDL::Rotation axisPow;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
196 const KDL::Vector p, crossPr2;
+
197 const double crossPr2Norm;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
234 const KDL::Vector p, k;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
272 const KDL::Vector p, n;
+
273 const KDL::Rotation axisPow;
+
+
+
+
+
+
Abstraction of a term in a product of exponentials (POE) formula.
Definition: MatrixExponential.hpp:19
+
First Paden-Kahan subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:24
+
PadenKahanOne(int id, const MatrixExponential &exp, const KDL::Vector &p)
Constructor.
Definition: PadenKahanSubproblems.cpp:13
+
bool solve(const KDL::Frame &rhs, const KDL::Frame &pointTransform, Solutions &solutions) const override
Finds a closed geometric solution for this IK subproblem.
Definition: PadenKahanSubproblems.cpp:22
+
const char * describe() const override
Return a human-readable description of this IK subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:40
+
int solutions() const override
Number of local IK solutions.
Definition: ScrewTheoryIkSubproblems.hpp:37
+
Third Paden-Kahan subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:100
+
bool solve(const KDL::Frame &rhs, const KDL::Frame &pointTransform, Solutions &solutions) const override
Finds a closed geometric solution for this IK subproblem.
Definition: PadenKahanSubproblems.cpp:161
+
const char * describe() const override
Return a human-readable description of this IK subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:117
+
int solutions() const override
Number of local IK solutions.
Definition: ScrewTheoryIkSubproblems.hpp:114
+
PadenKahanThree(int id, const MatrixExponential &exp, const KDL::Vector &p, const KDL::Vector &k)
Constructor.
Definition: PadenKahanSubproblems.cpp:151
+
Second Paden-Kahan subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:60
+
bool solve(const KDL::Frame &rhs, const KDL::Frame &pointTransform, Solutions &solutions) const override
Finds a closed geometric solution for this IK subproblem.
Definition: PadenKahanSubproblems.cpp:64
+
PadenKahanTwo(int id1, int id2, const MatrixExponential &exp1, const MatrixExponential &exp2, const KDL::Vector &p, const KDL::Vector &r)
Constructor.
Definition: PadenKahanSubproblems.cpp:49
+
int solutions() const override
Number of local IK solutions.
Definition: ScrewTheoryIkSubproblems.hpp:76
+
const char * describe() const override
Return a human-readable description of this IK subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:79
+
Fourth Pardos-Gotor subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:248
+
PardosGotorFour(int id1, int id2, const MatrixExponential &exp1, const MatrixExponential &exp2, const KDL::Vector &p)
Constructor.
Definition: PardosGotorSubproblems.cpp:148
+
bool solve(const KDL::Frame &rhs, const KDL::Frame &pointTransform, Solutions &solutions) const override
Finds a closed geometric solution for this IK subproblem.
Definition: PardosGotorSubproblems.cpp:160
+
int solutions() const override
Number of local IK solutions.
Definition: ScrewTheoryIkSubproblems.hpp:263
+
const char * describe() const override
Return a human-readable description of this IK subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:266
+
First Pardos-Gotor subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:137
+
int solutions() const override
Number of local IK solutions.
Definition: ScrewTheoryIkSubproblems.hpp:150
+
bool solve(const KDL::Frame &rhs, const KDL::Frame &pointTransform, Solutions &solutions) const override
Finds a closed geometric solution for this IK subproblem.
Definition: PardosGotorSubproblems.cpp:32
+
PardosGotorOne(int id, const MatrixExponential &exp, const KDL::Vector &p)
Constructor.
Definition: PardosGotorSubproblems.cpp:24
+
const char * describe() const override
Return a human-readable description of this IK subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:153
+
Third Pardos-Gotor subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:211
+
const char * describe() const override
Return a human-readable description of this IK subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:228
+
int solutions() const override
Number of local IK solutions.
Definition: ScrewTheoryIkSubproblems.hpp:225
+
bool solve(const KDL::Frame &rhs, const KDL::Frame &pointTransform, Solutions &solutions) const override
Finds a closed geometric solution for this IK subproblem.
Definition: PardosGotorSubproblems.cpp:107
+
PardosGotorThree(int id, const MatrixExponential &exp, const KDL::Vector &p, const KDL::Vector &k)
Constructor.
Definition: PardosGotorSubproblems.cpp:98
+
Second Pardos-Gotor subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:172
+
bool solve(const KDL::Frame &rhs, const KDL::Frame &pointTransform, Solutions &solutions) const override
Finds a closed geometric solution for this IK subproblem.
Definition: PardosGotorSubproblems.cpp:63
+
PardosGotorTwo(int id1, int id2, const MatrixExponential &exp1, const MatrixExponential &exp2, const KDL::Vector &p)
Constructor.
Definition: PardosGotorSubproblems.cpp:51
+
const char * describe() const override
Return a human-readable description of this IK subproblem.
Definition: ScrewTheoryIkSubproblems.hpp:190
+
int solutions() const override
Number of local IK solutions.
Definition: ScrewTheoryIkSubproblems.hpp:187
+
Interface shared by all IK subproblems found in Screw Theory applied to Robotics.
Definition: ScrewTheoryIkProblem.hpp:26
+
std::vector< JointIdsToSolutions > Solutions
Collection of local IK solutions.
Definition: ScrewTheoryIkProblem.hpp:35
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __SCREW_THEORY_TOOLS_HPP__
+
4 #define __SCREW_THEORY_TOOLS_HPP__
+
+
+
+
8 #include <kdl/frames.hpp>
+
9 #include <kdl/utilities/utility.h>
+
+
+
+
+
+
+
47 return KDL::Rotation(v.x() * v.x(), v.x() * v.y(), v.x() * v.z(),
+
48 v.x() * v.y(), v.y() * v.y(), v.y() * v.z(),
+
49 v.x() * v.z(), v.y() * v.z(), v.z() * v.z());
+
+
+
+
+
66 if (KDL::Equal(std::abs(angle), KDL::PI))
+
+
+
+
70 else if (angle > KDL::PI)
+
+
72 return angle - 2 * KDL::PI;
+
+
74 else if (angle < -KDL::PI)
+
+
76 return angle + 2 * KDL::PI;
+
+
+
+
+
+
+
+
+
+
+
KDL::Rotation vectorPow2(const KDL::Vector &v)
Multiply a vector by itself to obtain a square matrix.
Definition: ScrewTheoryTools.hpp:45
+
double normalizeAngle(double angle)
Clip an angle value between certain bounds.
Definition: ScrewTheoryTools.hpp:64
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __SPNAV_SENSOR_DEVICE_HPP__
+
2 #define __SPNAV_SENSOR_DEVICE_HPP__
+
+
4 #include "StreamingDevice.hpp"
+
+
6 #include <yarp/dev/IAnalogSensor.h>
+
+
+
+
+
+
+
+
21 SpnavSensorDevice(yarp::os::Searchable & config,
bool usingMovi,
double gain = 0.0);
+
+
+
+
25 bool initialize(
bool usingStreamingPreset)
override;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
40 yarp::dev::IAnalogSensor * iAnalogSensor;
+
+
42 std::vector<double> currentX;
+
+
+
+
+
+
+
+
+
+
+
Represents a spacenav-compatible device, like the SpaceNavigator 6-DOF mouse from 3Dconnexion.
Definition: SpnavSensorDevice.hpp:18
+
bool acquireData() override
Acquires data from remote device.
Definition: SpnavSensorDevice.cpp:66
+
void stopMotion() override
Sends a movement command that would stop motion.
Definition: SpnavSensorDevice.cpp:183
+
void sendMovementCommand(double timestamp) override
Sends movement command to the cartesian controller.
Definition: SpnavSensorDevice.cpp:166
+
bool transformData(double scaling) override
Performs required operations on stored data.
Definition: SpnavSensorDevice.cpp:93
+
SpnavSensorDevice(yarp::os::Searchable &config, bool usingMovi, double gain=0.0)
Constructor.
Definition: SpnavSensorDevice.cpp:10
+
bool acquireInterfaces() override
Acquires plugin interfaces.
Definition: SpnavSensorDevice.cpp:19
+
int getActuatorState() override
If actuator command data is available, return its current state.
Definition: SpnavSensorDevice.cpp:117
+
bool initialize(bool usingStreamingPreset) override
Perform any custom initialization needed. This method is called after the successful creation of the ...
Definition: SpnavSensorDevice.cpp:32
+
bool hasValidMovementData() const override
Checks whether the device may forward acquired and processed data to the controller.
Definition: SpnavSensorDevice.cpp:146
+
Abstract class for a YARP streaming device.
Definition: StreamingDevice.hpp:46
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __STREAMING_DEVICE_CONTROLLER_HPP__
+
2 #define __STREAMING_DEVICE_CONTROLLER_HPP__
+
+
+
+
6 #include <yarp/os/Bottle.h>
+
7 #include <yarp/os/BufferedPort.h>
+
8 #include <yarp/os/RFModule.h>
+
9 #include <yarp/os/TypedReaderCallback.h>
+
+
11 #include <yarp/dev/PolyDriver.h>
+
+
13 #include "StreamingDevice.hpp"
+
14 #include "CentroidTransform.hpp"
+
+
+
+
+
+
+
+
30 public yarp::os::TypedReaderCallback<yarp::os::Bottle>
+
+
+
+
+
+
36 bool configure(yarp::os::ResourceFinder & rf)
override;
+
37 bool updateModule()
override;
+
38 bool interruptModule()
override;
+
39 bool close()
override;
+
40 double getPeriod()
override;
+
41 void onRead(yarp::os::Bottle & bot)
override;
+
+
+
44 bool update(
double timestamp);
+
+
+
+
48 yarp::dev::PolyDriver cartesianControlClientDevice;
+
+
+
51 yarp::os::BufferedPort<yarp::os::Bottle> proximityPort;
+
52 int thresholdAlertHigh;
+
53 int thresholdAlertLow;
+
54 bool disableSensorsLowLevel;
+
+
56 yarp::os::BufferedPort<yarp::os::Bottle> centroidPort;
+
+
+
59 yarp::os::BufferedPort<yarp::os::Bottle> syncPort;
+
+
+
+
+
+
+
+
+
+
Contains roboticslab::ICartesianControl and related vocabs.
+
+
Abstract base class for a cartesian controller.
Definition: ICartesianControl.h:146
+
Sends streaming commands to the cartesian controller from a streaming input device like the 3Dconnexi...
Definition: StreamingDeviceController.hpp:31
+
Abstract class for a YARP streaming device.
Definition: StreamingDevice.hpp:46
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __STREAMING_DEVICE_HPP__
+
2 #define __STREAMING_DEVICE_HPP__
+
+
+
+
+
7 #include <yarp/os/Searchable.h>
+
8 #include <yarp/os/Value.h>
+
9 #include <yarp/dev/PolyDriver.h>
+
+
+
12 #include "CentroidTransform.hpp"
+
+
+
+
+
17 class StreamingDevice;
+
18 class CentroidTransform;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
50 using PolyDriver::isValid;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
100 return actuatorState;
+
+
+
+
+
+
+
+
+
+
+
127 this->iCartesianControl = iCartesianControl;
+
+
+
+
+
+
133 std::vector<double> data;
+
134 std::vector<bool> fixedAxes;
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Contains roboticslab::ICartesianControl and related vocabs.
+
+
Abstract base class for a cartesian controller.
Definition: ICartesianControl.h:146
+
Represents an invalid device.
Definition: StreamingDevice.hpp:153
+
void stopMotion() override
Sends a movement command that would stop motion.
Definition: StreamingDevice.hpp:173
+
bool acquireInterfaces() override
Acquires plugin interfaces.
Definition: StreamingDevice.hpp:160
+
bool acquireData() override
Acquires data from remote device.
Definition: StreamingDevice.hpp:165
+
void sendMovementCommand(double timestamp) override
Sends movement command to the cartesian controller.
Definition: StreamingDevice.hpp:170
+
InvalidDevice()
Creates an invalid device.
Definition: StreamingDevice.hpp:156
+
Factory class for creating instances of StreamingDevice.
Definition: StreamingDevice.hpp:26
+
static StreamingDevice * makeDevice(const std::string &deviceName, yarp::os::Searchable &config)
Creates a new YARP device handle.
Definition: StreamingDevice.cpp:15
+
Abstract class for a YARP streaming device.
Definition: StreamingDevice.hpp:46
+
virtual bool transformData(double scaling)
Performs required operations on stored data.
Definition: StreamingDevice.cpp:62
+
virtual bool acquireData()=0
Acquires data from remote device.
+
virtual void stopMotion()=0
Sends a movement command that would stop motion.
+
virtual bool hasValidMovementData() const
Checks whether the device may forward acquired and processed data to the controller.
Definition: StreamingDevice.cpp:79
+
virtual int getActuatorState()
If actuator command data is available, return its current state.
Definition: StreamingDevice.hpp:98
+
virtual void sendMovementCommand(double timestamp)=0
Sends movement command to the cartesian controller.
+
virtual bool acquireInterfaces()=0
Acquires plugin interfaces.
+
void setCartesianControllerHandle(ICartesianControl *iCartesianControl)
Stores handle to an ICartesianControl instance.
Definition: StreamingDevice.hpp:125
+
virtual bool initialize(bool usingStreamingPreset)
Perform any custom initialization needed. This method is called after the successful creation of the ...
Definition: StreamingDevice.hpp:75
+
virtual ~StreamingDevice()
Destructor.
Definition: StreamingDevice.cpp:57
+
void configureFixedAxes(const yarp::os::Value &v)
Stores vector of values representing axes that are always fixed.
Definition: StreamingDevice.cpp:97
+
StreamingDevice(yarp::os::Searchable &config)
Constructor.
Definition: StreamingDevice.cpp:46
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __TRAJ_GEN_HPP__
+
4 #define __TRAJ_GEN_HPP__
+
+
6 #include <yarp/os/Log.h>
+
+
+
+
+
+
29 virtual bool configure(
const double xi,
const double xf,
const double _T) = 0;
+
30 virtual bool configure(
const double xi,
const double xf,
const double xdoti,
const double xdotf,
const double _T) = 0;
+
31 virtual double get(
const double ti)
const = 0;
+
32 virtual double getdot(
const double ti)
const = 0;
+
33 virtual double getdotdot(
const double ti)
const = 0;
+
34 virtual bool maxVelBelow(
const double thresVel)
const = 0;
+
35 virtual bool maxAccBelow(
const double thresAcc)
const = 0;
+
36 virtual double getT()
const = 0;
+
37 virtual void dump(
double samples)
const = 0;
+
+
+
+
+
+
+
+
50 bool configure(
const double xi,
const double xf,
const double _T)
+
+
+
+
+
+
+
+
58 bool configure(
const double xi,
const double xf,
const double xdoti,
const double xdotf,
const double _T)
+
+
+
+
+
63 double get(
const double ti)
const
+
+
+
+
+
68 double getdot(
const double ti)
const
+
+
+
+
+
73 double getdotdot(
const double ti)
const
+
+
+
+
+
78 bool maxVelBelow(
const double thresVel)
const
+
+
+
+
+
83 bool maxAccBelow(
const double thresAcc)
const
+
+
+
+
+
+
+
+
+
+
93 void dump(
double samples)
const
+
+
95 for (
double i = 0; i < T; i += (T / samples))
+
+
97 yInfo(
"%05.2f %+02.6f %+02.6f %+02.6f", i, get(i), getdot(i), getdotdot(i));
+
+
+
+
+
+
+
+
+
+
+
+
+
118 bool configure(
const double xi,
const double xf,
const double _T)
+
+
+
+
+
123 a3 = 2 * (xi - xf) / (T * T * T);
+
124 a2 = (xf - xi) / (T * T) - a3 * T;
+
+
+
+
131 bool configure(
const double xi,
const double xf,
const double xdoti,
const double xdotf,
const double _T)
+
+
+
+
+
136 a3 = 2.0 * (xi - xf) / (T * T * T) + (xdotf + xdoti) / (T * T);
+
137 a2 = (xf - xi - xdoti * T) / (T * T) - a3 * T;
+
+
+
+
144 double get(
const double ti)
const
+
+
+
+
148 return a3 * T * T * T + a2 * T * T + a1 * T + a0;
+
+
150 return a3 * ti * ti * ti + a2 * ti * ti + a1 * ti + a0;
+
+
+
+
+
+
+
160 return 3 * a3 * T * T + 2 * a2 * T + a1;
+
+
162 return 3 * a3 * ti * ti + 2 * a2 * ti + a1;
+
+
+
+
+
+
+
172 return 6 * a3 * T + 2 * a2;
+
+
174 return 6 * a3 * ti + 2 * a2;
+
+
+
+
+
182 return getdot(T / 2) < thresVel;
+
+
+
+
+
+
+
+
+
+
+
+
+
205 void dump(
double samples)
const
+
+
207 for (
double i = 0; i < T; i += (T / samples))
+
+
+
+
+
+
+
214 double a3, a2, a1, a0, T;
+
+
+
+
+
Generates a 1DOF order-one trajectory.
Definition: TrajGen.hpp:46
+
Generates a 1DOF order-three trajectory.
Definition: TrajGen.hpp:111
+
void dump(double samples) const
Definition: TrajGen.hpp:205
+
bool maxVelBelow(const double thresVel) const
Definition: TrajGen.hpp:180
+
bool maxAccBelow(const double thresAcc) const
Definition: TrajGen.hpp:188
+
double getdot(const double ti) const
Definition: TrajGen.hpp:156
+
double getT() const
Definition: TrajGen.hpp:196
+
double getdotdot(const double ti) const
Definition: TrajGen.hpp:168
+
double get(const double ti) const
Definition: TrajGen.hpp:144
+
bool configure(const double xi, const double xf, const double xdoti, const double xdotf, const double _T)
Definition: TrajGen.hpp:131
+
bool configure(const double xi, const double xf, const double _T)
Definition: TrajGen.hpp:118
+
A base class for 1 degree-of-freedom trajectories.
Definition: TrajGen.hpp:26
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __TRAJECTORY_THREAD_HPP__
+
4 #define __TRAJECTORY_THREAD_HPP__
+
+
6 #include <yarp/os/PeriodicThread.h>
+
+
8 #include <yarp/dev/IEncoders.h>
+
9 #include <yarp/dev/IPositionDirect.h>
+
+
11 #include <kdl/trajectory.hpp>
+
+
13 #include <ScrewTheoryIkProblem.hpp>
+
14 #include <ConfigurationSelector.hpp>
+
+
+
+
+
+
20 yarp::dev::IPositionDirect * iPosDirect,
+
+
+
23 KDL::Trajectory * trajectory,
+
+
25 : yarp::os::PeriodicThread(period * 0.001, yarp::os::PeriodicThreadClock::Absolute),
+
+
27 iPosDirect(iPosDirect),
+
+
+
30 trajectory(trajectory),
+
+
+
+
+
+
36 bool threadInit()
override;
+
+
+
+
40 yarp::dev::IEncoders * iEncoders;
+
41 yarp::dev::IPositionDirect * iPosDirect;
+
+
+
44 KDL::Trajectory * trajectory;
+
+
+
+
+
+
Definition: TrajectoryThread.hpp:17
+
Abstract base class for a robot configuration strategy selector.
Definition: ConfigurationSelector.hpp:20
+
Proxy IK problem solver class that iterates over a sequence of subproblems.
Definition: ScrewTheoryIkProblem.hpp:95
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __WIIMOTE_SENSOR_DEVICE_HPP__
+
2 #define __WIIMOTE_SENSOR_DEVICE_HPP__
+
+
4 #include "StreamingDevice.hpp"
+
+
+
+
8 #include <yarp/os/Value.h>
+
9 #include <yarp/dev/IAnalogSensor.h>
+
+
11 #define DEFAULT_STEP 0.01
+
+
+
+
+
+
+
+
+
+
+
+
30 bool initialize(
bool usingStreamingPreset)
override;
+
+
+
+
+
+
+
+
+
+
+
+
+
43 enum cmd_mode { NONE, FWD, BKWD, ROT };
+
+
45 yarp::dev::IAnalogSensor * iAnalogSensor;
+
+
+
+
49 std::vector<double> buffer;
+
+
+
+
+
+
+
+
+
Abstract class for a YARP streaming device.
Definition: StreamingDevice.hpp:46
+
Represents a Wiimote device wrapped as an analog sensor by YARP.
Definition: WiimoteSensorDevice.hpp:23
+
WiimoteSensorDevice(yarp::os::Searchable &config, bool usingPose)
Constructor.
Definition: WiimoteSensorDevice.cpp:13
+
void sendMovementCommand(double timestamp) override
Sends movement command to the cartesian controller.
Definition: WiimoteSensorDevice.cpp:132
+
bool hasValidMovementData() const override
Checks whether the device may forward acquired and processed data to the controller.
Definition: WiimoteSensorDevice.cpp:127
+
bool transformData(double scaling) override
Performs required operations on stored data.
Definition: WiimoteSensorDevice.cpp:87
+
bool initialize(bool usingStreamingPreset) override
Perform any custom initialization needed. This method is called after the successful creation of the ...
Definition: WiimoteSensorDevice.cpp:38
+
bool acquireInterfaces() override
Acquires plugin interfaces.
Definition: WiimoteSensorDevice.cpp:25
+
void stopMotion() override
Sends a movement command that would stop motion.
Definition: WiimoteSensorDevice.cpp:162
+
bool acquireData() override
Acquires data from remote device.
Definition: WiimoteSensorDevice.cpp:66
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
3 #ifndef __YARP_TINY_MATH_HPP__
+
4 #define __YARP_TINY_MATH_HPP__
+
+
6 #define _USE_MATH_DEFINES
+
+
+
9 #include <yarp/sig/Vector.h>
+
10 #include <yarp/sig/Matrix.h>
+
+
+
+
+
26 double toDeg(
const double inRad);
+
+
33 double toRad(
const double inDeg);
+
+
40 void xUpdateH(
const yarp::sig::Vector &x, yarp::sig::Matrix &H);
+
+
42 yarp::sig::Matrix rotX(
const double &inDeg);
+
43 yarp::sig::Matrix rotY(
const double &inDeg);
+
44 yarp::sig::Matrix rotZ(
const double &inDeg);
+
+
51 yarp::sig::Matrix
eulerZYZtoH(
const yarp::sig::Vector &x,
const yarp::sig::Vector &o);
+
+
59 yarp::sig::Matrix
eulerYZtoH(
const yarp::sig::Vector &x,
const yarp::sig::Vector &o);
+
+
67 yarp::sig::Matrix
axisAngleToH(
const yarp::sig::Vector &x,
const yarp::sig::Vector &o);
+
+
+
+
+
+
The main, catch-all namespace for Robotics Lab UC3M.
Definition: groups.dox:6
+
yarp::sig::Matrix axisAngleToH(const yarp::sig::Vector &x, const yarp::sig::Vector &o)
Definition: YarpTinyMath.cpp:99
+
double toDeg(const double inRad)
Definition: YarpTinyMath.cpp:9
+
void xUpdateH(const yarp::sig::Vector &x, yarp::sig::Matrix &H)
Definition: YarpTinyMath.cpp:23
+
yarp::sig::Matrix eulerZYZtoH(const yarp::sig::Vector &x, const yarp::sig::Vector &o)
Definition: YarpTinyMath.cpp:77
+
double toRad(const double inDeg)
Definition: YarpTinyMath.cpp:16
+
yarp::sig::Matrix eulerYZtoH(const yarp::sig::Vector &x, const yarp::sig::Vector &o)
Definition: YarpTinyMath.cpp:88
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here are the classes, structs, unions and interfaces with brief descriptions:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+- [1]
+Bartek Lukawski, Ignacio Montesino Valle, Juan G. Victores, Alberto Jardón, and Carlos Balaguer. An inverse kinematics problem solver based on screw theory for manipulator arms. In XLIII Jornadas de Automática, pages 864–869. Universidade da Coruña, 2022.
+
+- [2]
+Bartek Lukawski, Juan G. Victores, and Carlos Balaguer. A generic controller for teleoperation on robotic manipulators using low-cost devices. In XLIV Jornadas de Automática, pages 785–788. Universidade da Coruña, 2023.
+
+- [3]
+Edwin Daniel Oña, Bartek Lukawski, Alberto Jardón, and Carlos Balaguer. A modular framework to facilitate the control of an assistive robotic arm using visual servoing and proximity sensing. In IEEE Int. Conf. on Autonomous Robot Systems and Competitions (ICARSC), pages 28–33, 2020.
+
+- [4]
+José Manuel Pardos-Gotor. Screw Theory for Robotics - A practical approach for Modern Robot KINEMATICS - An Illustrated Handbook. Amazon Fulfillment, 9 2018. ISBN 978-1-7179-3181-8.
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for OrderOneTraj, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Generates a 1DOF order-one trajectory.
+
+
+
#include <TrajGen.hpp>
+
+
+
+

+
+
+
+ |
+|
+bool | configure (const double xi, const double xf, const double _T) |
+| |
+|
+bool | configure (const double xi, const double xf, const double xdoti, const double xdotf, const double _T) |
+| |
+|
+double | get (const double ti) const |
+| |
+|
+double | getdot (const double ti) const |
+| |
+|
+double | getdotdot (const double ti) const |
+| |
+|
+bool | maxVelBelow (const double thresVel) const |
+| |
+|
+bool | maxAccBelow (const double thresAcc) const |
+| |
+|
+double | getT () const |
+| |
+|
+void | dump (double samples) const |
+| |
+
+ |
+|
+double | T |
+| |
+|
+double | m |
+| |
+|
+double | b |
+| |
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for OrderThreeTraj, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Generates a 1DOF order-three trajectory.
+
+
+
#include <TrajGen.hpp>
+
+
+
+

+
+
+
+ |
+| bool | configure (const double xi, const double xf, const double _T) |
+| |
+| bool | configure (const double xi, const double xf, const double xdoti, const double xdotf, const double _T) |
+| |
+| double | get (const double ti) const |
+| |
+| double | getdot (const double ti) const |
+| |
+| double | getdotdot (const double ti) const |
+| |
+| bool | maxVelBelow (const double thresVel) const |
+| |
+| bool | maxAccBelow (const double thresAcc) const |
+| |
+| double | getT () const |
+| |
+| void | dump (double samples) const |
+| |
+
+ |
+|
+double | a3 |
+| |
+|
+double | a2 |
+| |
+|
+double | a1 |
+| |
+|
+double | a0 |
+| |
+|
+double | T |
+| |
+
+
+
+
◆ configure() [1/2]
+
+
+
+
+
+
+
+
+ | bool OrderThreeTraj::configure |
+ ( |
+ const double |
+ xi, |
+
+
+ |
+ |
+ const double |
+ xf, |
+
+
+ |
+ |
+ const double |
+ _T |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
Configure the trajectory. Forces null initial and final velocities.
+
+
Implements Traj.
+
+
+
+
+
◆ configure() [2/2]
+
+
+
+
+
+
+
+
+ | bool OrderThreeTraj::configure |
+ ( |
+ const double |
+ xi, |
+
+
+ |
+ |
+ const double |
+ xf, |
+
+
+ |
+ |
+ const double |
+ xdoti, |
+
+
+ |
+ |
+ const double |
+ xdotf, |
+
+
+ |
+ |
+ const double |
+ _T |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
Configure the trajectory setting an initial and final velocity too (warning: possible overshoot).
+
+
Implements Traj.
+
+
+
+
+
◆ dump()
+
+
+
+
+
+
+
+
+ | void OrderThreeTraj::dump |
+ ( |
+ double |
+ samples | ) |
+ const |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
Printf of ti, f(ti), fdot(ti), fdotdot(ti) for whole duration interval.
- Parameters
-
+
+ | samples | number of lines to print. |
+
+
+
+
+
Implements Traj.
+
+
+
+
+
◆ get()
+
+
+
+
+
+
+
+
+ | double OrderThreeTraj::get |
+ ( |
+ const double |
+ ti | ) |
+ const |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
- Returns
- the value of the function at instant ti.
+
+
Implements Traj.
+
+
+
+
+
◆ getdot()
+
+
+
+
+
+
+
+
+ | double OrderThreeTraj::getdot |
+ ( |
+ const double |
+ ti | ) |
+ const |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
- Returns
- the value of the first derivative of the function at instant ti.
+
+
Implements Traj.
+
+
+
+
+
◆ getdotdot()
+
+
+
+
+
+
+
+
+ | double OrderThreeTraj::getdotdot |
+ ( |
+ const double |
+ ti | ) |
+ const |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
- Returns
- the value of the second derivative of the function at instant ti.
+
+
Implements Traj.
+
+
+
+
+
◆ getT()
+
+
+
+
+
+
+
+
+ | double OrderThreeTraj::getT |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
- Returns
- duration assigned to the trajectory instance.
+
+
Implements Traj.
+
+
+
+
+
◆ maxAccBelow()
+
+
+
+
+
+
+
+
+ | bool OrderThreeTraj::maxAccBelow |
+ ( |
+ const double |
+ thresAcc | ) |
+ const |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
Check if the maximum of the second derivative is below a certain threshold.
+
+
Implements Traj.
+
+
+
+
+
◆ maxVelBelow()
+
+
+
+
+
+
+
+
+ | bool OrderThreeTraj::maxVelBelow |
+ ( |
+ const double |
+ thresVel | ) |
+ const |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
Check if the maximum of the first derivative is below a certain threshold.
+
+
Implements Traj.
+
+
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for Traj, including all inherited members.
+
+ | configure(const double xi, const double xf, const double _T)=0 (defined in Traj) | Traj | pure virtual |
+ | configure(const double xi, const double xf, const double xdoti, const double xdotf, const double _T)=0 (defined in Traj) | Traj | pure virtual |
+ | dump(double samples) const =0 (defined in Traj) | Traj | pure virtual |
+ | get(const double ti) const =0 (defined in Traj) | Traj | pure virtual |
+ | getdot(const double ti) const =0 (defined in Traj) | Traj | pure virtual |
+ | getdotdot(const double ti) const =0 (defined in Traj) | Traj | pure virtual |
+ | getT() const =0 (defined in Traj) | Traj | pure virtual |
+ | maxAccBelow(const double thresAcc) const =0 (defined in Traj) | Traj | pure virtual |
+ | maxVelBelow(const double thresVel) const =0 (defined in Traj) | Traj | pure virtual |
+ | ~Traj() (defined in Traj) | Traj | inlinevirtual |
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
A base class for 1 degree-of-freedom trajectories.
+
+
+
#include <TrajGen.hpp>
+
+
+
+

+
+
+
+ |
+|
+virtual bool | configure (const double xi, const double xf, const double _T)=0 |
+| |
+|
+virtual bool | configure (const double xi, const double xf, const double xdoti, const double xdotf, const double _T)=0 |
+| |
+|
+virtual double | get (const double ti) const =0 |
+| |
+|
+virtual double | getdot (const double ti) const =0 |
+| |
+|
+virtual double | getdotdot (const double ti) const =0 |
+| |
+|
+virtual bool | maxVelBelow (const double thresVel) const =0 |
+| |
+|
+virtual bool | maxAccBelow (const double thresAcc) const =0 |
+| |
+|
+virtual double | getT () const =0 |
+| |
+|
+virtual void | dump (double samples) const =0 |
+| |
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for TrajectoryThread, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+

+
+
+ |
+|
+bool | threadInit () override |
+| |
+|
+void | run () override |
+| |
+
+
The documentation for this class was generated from the following files:
+- examples/cpp/exampleScrewTheoryTrajectory/TrajectoryThread.hpp
+- examples/cpp/exampleScrewTheoryTrajectory/TrajectoryThread.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/classroboticslab_1_1AsibotConfiguration-members.html b/classroboticslab_1_1AsibotConfiguration-members.html
new file mode 100644
index 000000000..d824a12e1
--- /dev/null
+++ b/classroboticslab_1_1AsibotConfiguration-members.html
@@ -0,0 +1,102 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Member List
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::AsibotConfiguration, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Abstract base class for a robot configuration strategy selector.
+ More...
+
+
#include <AsibotConfiguration.hpp>
+
+
+
+

+
+
+
+ |
+| struct | Pose |
+| | Helper class to store a specific robot configuration. More...
|
+| |
+
+ |
+|
+using | JointsIn = const std::vector< double > & |
+| | Const vector of joint angles (input parameter).
|
+| |
+|
+using | JointsOut = std::vector< double > & |
+| | Vector of joint angles (output parameter).
|
+| |
+
+
+
Designed with ASIBOT's specific case in mind, which entails up to four different configurations depending on initial angles provided.
+
+
+
◆ AsibotConfiguration()
+
+
+
+
+
+
+
+
+ | roboticslab::AsibotConfiguration::AsibotConfiguration |
+ ( |
+ JointsIn |
+ qMin, |
+
+
+ |
+ |
+ JointsIn |
+ qMax |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+inline |
+
+
+
+
- Parameters
-
+
+ | qMin | vector of minimum joint limits [deg] |
+ | qMax | vector of maximum joint limits [deg] |
+
+
+
+
+
+
+
+
+
◆ configure()
+
+
+
+
+
+
+
+
+ | bool AsibotConfiguration::configure |
+ ( |
+ double |
+ q1, |
+
+
+ |
+ |
+ double |
+ q2u, |
+
+
+ |
+ |
+ double |
+ q2d, |
+
+
+ |
+ |
+ double |
+ q3, |
+
+
+ |
+ |
+ double |
+ q4u, |
+
+
+ |
+ |
+ double |
+ q4d, |
+
+
+ |
+ |
+ double |
+ q5 |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+virtual |
+
+
+
+
Distinguishes between elbow up and down poses. Make sure that:
+
oyP = q2u + q3 + q4u = q2d - q3 + q4d
+
- Parameters
-
+
+ | q1 | IK solution for joint 1 [deg] |
+ | q2u | IK solution for joint 2 (elbow up) [deg] |
+ | q2d | IK solution for joint 2 (elbow down) [deg] |
+ | q3 | IK solution for joint 3 [deg] |
+ | q4u | IK solution for joint 4 (elbow up) [deg] |
+ | q4d | IK solution for joint 4 (elbow down) [deg] |
+ | q5 | IK solution for joint 5 [deg] |
+
+
+
+
- Returns
- true/false on success/failure
+
+
+
+
+
◆ findOptimalConfiguration()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::AsibotConfiguration::findOptimalConfiguration |
+ ( |
+ JointsIn |
+ qGuess | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ retrieveAngles()
+
+
+
+
+
+
+
+
+ | virtual void roboticslab::AsibotConfiguration::retrieveAngles |
+ ( |
+ JointsOut |
+ q | ) |
+ const |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
- Parameters
-
+
+ | q | vector of joint angles [deg] |
+
+
+
+
+
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/AsibotSolver/AsibotConfiguration.hpp
+- libraries/YarpPlugins/AsibotSolver/AsibotConfiguration.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::AsibotConfigurationFactory, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Base factory class for AsibotConfiguration.
+ More...
+
+
#include <AsibotConfiguration.hpp>
+
+
+
+

+
+
+
+
+
Acts as the base class in the abstract factory pattern, encapsulates individual factories.
+
+
+
◆ AsibotConfigurationFactory()
+
+
+
+
+
+ |
+
+ |
+
+inlineprotected |
+
+
+
+
- Parameters
-
+
+ | qMin | vector of minimum joint limits [deg] |
+ | qMax | vector of maximum joint limits [deg] |
+
+
+
+
+
+
+
+
+
◆ create()
+
+
+
+
+
+
+
+
+ | virtual AsibotConfiguration* roboticslab::AsibotConfigurationFactory::create |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::AsibotConfigurationLeastOverallAngularDisplacement, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
IK solver configuration strategy selector based on the overall angle displacement of all joints.
+ More...
+
+
#include <AsibotConfiguration.hpp>
+
+
+
+

+
+
+
+ |
+|
+std::vector< double > | getDiffs (JointsIn qGuess, const Pose &pose) |
+| | Obtains vector of differences between current and desired joint angles [deg].
|
+| |
+
+ |
+
+|
+using | JointsIn = const std::vector< double > & |
+| | Const vector of joint angles (input parameter).
|
+| |
+|
+using | JointsOut = std::vector< double > & |
+| | Vector of joint angles (output parameter).
|
+| |
+
+|
+JointsIn | _qMin |
+| |
+|
+JointsIn | _qMax |
+| |
+|
+Pose | optimalPose |
+| |
+|
+Pose | forwardElbowUp |
+| |
+|
+Pose | forwardElbowDown |
+| |
+|
+Pose | reversedElbowUp |
+| |
+|
+Pose | reversedElbowDown |
+| |
+
+
+
Selects the configuration that entails the lowest sum of angular displacements across all joints. Upon choosing between elbow up and down alternatives, a small angular travel distance for joint 2 is preferred.
+
+
+
◆ AsibotConfigurationLeastOverallAngularDisplacement()
+
+
+
+
+
+
+
+
+ | roboticslab::AsibotConfigurationLeastOverallAngularDisplacement::AsibotConfigurationLeastOverallAngularDisplacement |
+ ( |
+ JointsIn |
+ qMin, |
+
+
+ |
+ |
+ JointsIn |
+ qMax |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+inline |
+
+
+
+
- Parameters
-
+
+ | qMin | vector of minimum joint limits [deg] |
+ | qMax | vector of maximum joint limits [deg] |
+
+
+
+
+
+
+
+
+
◆ findOptimalConfiguration()
+
+
+
+
+
+
+
+
+ | bool AsibotConfigurationLeastOverallAngularDisplacement::findOptimalConfiguration |
+ ( |
+ JointsIn |
+ qGuess | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | qGuess | vector of joint angles for current robot position [deg] |
+
+
+
+
- Returns
- true/false on success/failure
+
+
Implements roboticslab::AsibotConfiguration.
+
+
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/AsibotSolver/AsibotConfiguration.hpp
+- libraries/YarpPlugins/AsibotSolver/AsibotConfigurationLeastOverallAngularDisplacement.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::AsibotConfigurationLeastOverallAngularDisplacementFactory, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Implementation factory class for AsibotConfigurationLeastOverallAngularDisplacement.
+ More...
+
+
#include <AsibotConfiguration.hpp>
+
+
+
+

+
+
+
+
+
+
+
◆ AsibotConfigurationLeastOverallAngularDisplacementFactory()
+
+
+
+
- Parameters
-
+
+ | qMin | vector of minimum joint limits [deg] |
+ | qMax | vector of maximum joint limits [deg] |
+
+
+
+
+
+
+
+
+
◆ create()
+
+
+
+
+
+
+
+
+ | AsibotConfiguration* roboticslab::AsibotConfigurationLeastOverallAngularDisplacementFactory::create |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+inlineoverridevirtual |
+
+
+
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::AsibotSolver, including all inherited members.
+
+ | A0 (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | private |
+ | A1 (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | private |
+ | A2 (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | private |
+ | A3 (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | private |
+ | appendLink(const std::vector< double > &x) override | roboticslab::AsibotSolver | virtual |
+ | BASE_FRAME enum value | roboticslab::ICartesianSolver | |
+ | changeOrigin(const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj) override | roboticslab::AsibotSolver | virtual |
+ | close() override (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | |
+ | confFactory (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | private |
+ | diffInvKin(const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame) override | roboticslab::AsibotSolver | virtual |
+ | fwdKin(const std::vector< double > &q, std::vector< double > &x) override | roboticslab::AsibotSolver | virtual |
+ | getConfiguration() const (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | private |
+ | getNumJoints() override | roboticslab::AsibotSolver | virtual |
+ | getNumTcps() override | roboticslab::AsibotSolver | virtual |
+ | getTcpFrame() const (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | private |
+ | invDyn(const std::vector< double > &q, std::vector< double > &t) override | roboticslab::AsibotSolver | virtual |
+ | invDyn(const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< double > &ftip, std::vector< double > &t, reference_frame frame) override | roboticslab::AsibotSolver | virtual |
+ | roboticslab::ICartesianSolver::invDyn(const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< std::vector< double >> &fexts, std::vector< double > &t) | roboticslab::ICartesianSolver | inlinevirtual |
+ | invKin(const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame) override | roboticslab::AsibotSolver | virtual |
+ | mtx (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | mutableprivate |
+ | open(yarp::os::Searchable &config) override (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | |
+ | poseDiff(const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut) override | roboticslab::AsibotSolver | virtual |
+ | qMax (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | private |
+ | qMin (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | private |
+ | reference_frame enum name | roboticslab::ICartesianSolver | |
+ | restoreOriginalChain() override | roboticslab::AsibotSolver | virtual |
+ | setTcpFrame(const AsibotTcpFrame &tcpFrameStruct) (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | private |
+ | TCP_FRAME enum value | roboticslab::ICartesianSolver | |
+ | tcpFrameStruct (defined in roboticslab::AsibotSolver) | roboticslab::AsibotSolver | private |
+ | ~ICartesianSolver()=default | roboticslab::ICartesianSolver | virtual |
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
The AsibotSolver implements ICartesianSolver.
+
+
+
#include <AsibotSolver.hpp>
+
+
+
+

+
+
+
+ |
+| int | getNumJoints () override |
+| | Get number of joints for which the solver has been configured. More...
|
+| |
+| int | getNumTcps () override |
+| | Get number of TCPs for which the solver has been configured. More...
|
+| |
+| bool | appendLink (const std::vector< double > &x) override |
+| | Append an additional link. More...
|
+| |
+| bool | restoreOriginalChain () override |
+| | Restore original kinematic chain. More...
|
+| |
+| bool | changeOrigin (const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj) override |
+| | Change origin in which a pose is expressed. More...
|
+| |
+| bool | fwdKin (const std::vector< double > &q, std::vector< double > &x) override |
+| | Perform forward kinematics. More...
|
+| |
+| bool | poseDiff (const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut) override |
+| | Obtain difference between supplied pose inputs. More...
|
+| |
+| bool | invKin (const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame) override |
+| | Perform inverse kinematics. More...
|
+| |
+| bool | diffInvKin (const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame) override |
+| | Perform differential inverse kinematics. More...
|
+| |
+| bool | invDyn (const std::vector< double > &q, std::vector< double > &t) override |
+| | Perform inverse dynamics. More...
|
+| |
+| bool | invDyn (const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< double > &ftip, std::vector< double > &t, reference_frame frame) override |
+| | Perform inverse dynamics. More...
|
+| |
+|
+bool | open (yarp::os::Searchable &config) override |
+| |
+|
+bool | close () override |
+| |
+
+|
+virtual | ~ICartesianSolver ()=default |
+| | Destructor.
|
+| |
+| virtual bool | invDyn (const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< std::vector< double >> &fexts, std::vector< double > &t) |
+| | Perform inverse dynamics. More...
|
+| |
+
+ |
+|
+double | A0 |
+| |
+|
+double | A1 |
+| |
+|
+double | A2 |
+| |
+|
+double | A3 |
+| |
+|
+std::vector< double > | qMin |
+| |
+|
+std::vector< double > | qMax |
+| |
+|
+AsibotConfigurationFactory * | confFactory {nullptr} |
+| |
+|
+AsibotTcpFrame | tcpFrameStruct |
+| |
+|
+std::mutex | mtx |
+| |
+
+
+
+
◆ appendLink()
+
+
+
+
+
+
+
+
+ | bool AsibotSolver::appendLink |
+ ( |
+ const std::vector< double > & |
+ x | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | x | 6-element vector describing end-effector frame in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ changeOrigin()
+
+
+
+
+
+
+
+
+ | bool AsibotSolver::changeOrigin |
+ ( |
+ const std::vector< double > & |
+ x_old_obj, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ x_new_old, |
+
+
+ |
+ |
+ std::vector< double > & |
+ x_new_obj |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | x_old_obj_in | 6-element vector describing a pose in cartesian space, expressed in the old frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | x_new_old | 6-element vector describing a transformation from the new to the old frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | x_new_obj | 6-element vector describing a pose in cartesian space, expressed in the new frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ diffInvKin()
+
+
+
+
+
+
+
+
+ | bool AsibotSolver::diffInvKin |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ xdot, |
+
+
+ |
+ |
+ std::vector< double > & |
+ qdot, |
+
+
+ |
+ |
+ reference_frame |
+ frame |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | xdot | 6-element vector describing desired velocity in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second). |
+ | qdot | Vector describing target velocity in joint space (meters/second or degrees/second). |
+ | frame | Points at the reference_frame the desired position is expressed in. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ fwdKin()
+
+
+
+
+
+
+
+
+ | bool AsibotSolver::fwdKin |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ std::vector< double > & |
+ x |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing a position in joint space (meters or degrees). |
+ | x | 6-element vector describing same position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ getNumJoints()
+
+
+
+
+
+
+
+
+ | int AsibotSolver::getNumJoints |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ getNumTcps()
+
+
+
+
+
+
+
+
+ | int AsibotSolver::getNumTcps |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ invDyn() [1/2]
+
+
+
+
+
+
+
+
+ | bool AsibotSolver::invDyn |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qdot, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qdotdot, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ ftip, |
+
+
+ |
+ |
+ std::vector< double > & |
+ t, |
+
+
+ |
+ |
+ reference_frame |
+ frame |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | qdot | Vector describing current velocity in joint space (meters/second or degrees/second). |
+ | qdotdot | Vector describing current acceleration in joint space (meters/second² or degrees/second²). |
+ | ftip | Vector describing an external force applied to the robot tip, expressed in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+ | t | 6-element vector describing desired forces in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+ | frame | Points at the reference_frame ftip is expressed in. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ invDyn() [2/2]
+
+
+
+
+
+
+
+
+ | bool AsibotSolver::invDyn |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ std::vector< double > & |
+ t |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Assumes null joint velocities and accelerations, and no external forces.
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | t | 6-element vector describing desired forces in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ invKin()
+
+
+
+
+
+
+
+
+ | bool AsibotSolver::invKin |
+ ( |
+ const std::vector< double > & |
+ xd, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qGuess, |
+
+
+ |
+ |
+ std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ reference_frame |
+ frame |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | qGuess | Vector describing current position in joint space (meters or degrees). |
+ | q | Vector describing target position in joint space (meters or degrees). |
+ | frame | Points at the reference_frame the desired position is expressed in. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ poseDiff()
+
+
+
+
+
+
+
+
+ | bool AsibotSolver::poseDiff |
+ ( |
+ const std::vector< double > & |
+ xLhs, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ xRhs, |
+
+
+ |
+ |
+ std::vector< double > & |
+ xOut |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
The result is an infinitesimal displacement twist, i.e. a vector, for which the operation of addition makes physical sense.
+
- Parameters
-
+
+ | xLhs | 6-element vector describing a pose in cartesian space (left hand side); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | xRhs | 6-element vector describing a pose in cartesian space (right hand side); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | xOut | 6-element vector describing a pose in cartesian space (result); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ restoreOriginalChain()
+
+
+
+
+
+
+
+
+ | bool AsibotSolver::restoreOriginalChain |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/AsibotSolver/AsibotSolver.hpp
+- libraries/YarpPlugins/AsibotSolver/AsibotSolver.cpp
+- libraries/YarpPlugins/AsibotSolver/DeviceDriverImpl.cpp
+- libraries/YarpPlugins/AsibotSolver/ICartesianSolverImpl.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::BasicCartesianControl, including all inherited members.
+
+ | act(int command) override | roboticslab::BasicCartesianControl | virtual |
+ | BasicCartesianControl() (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | inline |
+ | checkControlModes(int mode) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | checkJointLimits(const std::vector< double > &q) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | checkJointLimits(const std::vector< double > &q, const std::vector< double > &qdot) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | checkJointVelocities(const std::vector< double > &qdot) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | close() override (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | |
+ | cmcPeriodMs (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | cmcSuccess (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | computeIsocronousSpeeds(const std::vector< double > &q, const std::vector< double > &qd, std::vector< double > &qdot) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | currentState (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | doFailFastChecks(const std::vector< double > &initialQ) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | duration (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | enableFailFast (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | encoderErrors (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | fd | roboticslab::BasicCartesianControl | private |
+ | forc(const std::vector< double > &fd) override | roboticslab::BasicCartesianControl | virtual |
+ | gain (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | gcmp() override | roboticslab::BasicCartesianControl | virtual |
+ | getCurrentState() const (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | getParameter(int vocab, double *value) override | roboticslab::BasicCartesianControl | virtual |
+ | getParameters(std::map< int, double > ¶ms) override | roboticslab::BasicCartesianControl | virtual |
+ | handleForc(const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const StateWatcher &watcher) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | handleGcmp(const std::vector< double > &q, const StateWatcher &watcher) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | handleMovj(const std::vector< double > &q, const StateWatcher &watcher) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | handleMovlPosd(const std::vector< double > &q, const StateWatcher &watcher) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | handleMovlVel(const std::vector< double > &q, const StateWatcher &watcher) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | handleMovv(const std::vector< double > &q, const StateWatcher &watcher) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | iCartesianSolver (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | iControlMode (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | iEncoders (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | inv(const std::vector< double > &xd, std::vector< double > &q) override | roboticslab::BasicCartesianControl | virtual |
+ | iPositionControl (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | iPositionDirect (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | iPreciselyTimed (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | iTorqueControl (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | iVelocityControl (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | movementStartTime | roboticslab::BasicCartesianControl | private |
+ | movi(const std::vector< double > &x) (defined in roboticslab::ICartesianControl) | roboticslab::ICartesianControl | inlinevirtual |
+ | movj(const std::vector< double > &xd) override | roboticslab::BasicCartesianControl | virtual |
+ | movl(const std::vector< double > &xd) override | roboticslab::BasicCartesianControl | virtual |
+ | movv(const std::vector< double > &xdotd) override | roboticslab::BasicCartesianControl | virtual |
+ | numJoints (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | open(yarp::os::Searchable &config) override (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | |
+ | pose(const std::vector< double > &x) override | roboticslab::BasicCartesianControl | virtual |
+ | presetStreamingCommand(int command) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | qdotMax (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | qdotMin (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | qMax (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | qMin (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | qRefSpeeds (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | referenceFrame (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | relj(const std::vector< double > &xd) override | roboticslab::BasicCartesianControl | virtual |
+ | robotDevice (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | run() override (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | |
+ | setControlModes(int mode) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | setCurrentState(int value) (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | setParameter(int vocab, double value) override | roboticslab::BasicCartesianControl | virtual |
+ | setParameters(const std::map< int, double > ¶ms) override | roboticslab::BasicCartesianControl | virtual |
+ | solverDevice (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | stat(std::vector< double > &x, int *state=nullptr, double *timestamp=nullptr) override | roboticslab::BasicCartesianControl | virtual |
+ | stateMutex (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | mutableprivate |
+ | stopControl() override | roboticslab::BasicCartesianControl | virtual |
+ | streamingCommand (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | tool(const std::vector< double > &x) override | roboticslab::BasicCartesianControl | virtual |
+ | trajectories | roboticslab::BasicCartesianControl | private |
+ | twist(const std::vector< double > &xdot) override | roboticslab::BasicCartesianControl | virtual |
+ | usePosdMovl (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | vmoStored | roboticslab::BasicCartesianControl | private |
+ | wait(double timeout) override | roboticslab::BasicCartesianControl | virtual |
+ | waitPeriodMs (defined in roboticslab::BasicCartesianControl) | roboticslab::BasicCartesianControl | private |
+ | wrench(const std::vector< double > &w) override | roboticslab::BasicCartesianControl | virtual |
+ | ~ICartesianControl()=default | roboticslab::ICartesianControl | virtual |
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
The BasicCartesianControl class implements ICartesianControl.
+
+
+
#include <BasicCartesianControl.hpp>
+
+
+
+

+
+
+
+ |
+| bool | stat (std::vector< double > &x, int *state=nullptr, double *timestamp=nullptr) override |
+| | Current state and position. More...
|
+| |
+| bool | inv (const std::vector< double > &xd, std::vector< double > &q) override |
+| | Inverse kinematics. More...
|
+| |
+| bool | movj (const std::vector< double > &xd) override |
+| | Move in joint space, absolute coordinates. More...
|
+| |
+| bool | relj (const std::vector< double > &xd) override |
+| | Move in joint space, relative coordinates. More...
|
+| |
+| bool | movl (const std::vector< double > &xd) override |
+| | Linear move to target position. More...
|
+| |
+| bool | movv (const std::vector< double > &xdotd) override |
+| | Linear move with given velocity. More...
|
+| |
+| bool | gcmp () override |
+| | Gravity compensation. More...
|
+| |
+| bool | forc (const std::vector< double > &fd) override |
+| | Force control. More...
|
+| |
+| bool | stopControl () override |
+| | Stop control. More...
|
+| |
+| bool | wait (double timeout) override |
+| | Wait until completion. More...
|
+| |
+| bool | tool (const std::vector< double > &x) override |
+| | Change tool. More...
|
+| |
+| bool | act (int command) override |
+| | Actuate tool. More...
|
+| |
+| void | pose (const std::vector< double > &x) override |
+| | Achieve pose. More...
|
+| |
+| void | twist (const std::vector< double > &xdot) override |
+| | Instantaneous velocity steps. More...
|
+| |
+| void | wrench (const std::vector< double > &w) override |
+| | Exert force. More...
|
+| |
+| bool | setParameter (int vocab, double value) override |
+| | Set a configuration parameter. More...
|
+| |
+| bool | getParameter (int vocab, double *value) override |
+| | Retrieve a configuration parameter. More...
|
+| |
+| bool | setParameters (const std::map< int, double > ¶ms) override |
+| | Set multiple configuration parameters. More...
|
+| |
+| bool | getParameters (std::map< int, double > ¶ms) override |
+| | Retrieve multiple configuration parameters. More...
|
+| |
+|
+void | run () override |
+| |
+|
+bool | open (yarp::os::Searchable &config) override |
+| |
+|
+bool | close () override |
+| |
+
+|
+virtual | ~ICartesianControl ()=default |
+| | Destructor.
|
+| |
+|
+virtual void | movi (const std::vector< double > &x) |
+| |
+
+ |
+|
+int | getCurrentState () const |
+| |
+|
+void | setCurrentState (int value) |
+| |
+|
+bool | checkJointLimits (const std::vector< double > &q) |
+| |
+|
+bool | checkJointLimits (const std::vector< double > &q, const std::vector< double > &qdot) |
+| |
+|
+bool | checkJointVelocities (const std::vector< double > &qdot) |
+| |
+|
+bool | doFailFastChecks (const std::vector< double > &initialQ) |
+| |
+|
+bool | checkControlModes (int mode) |
+| |
+|
+bool | setControlModes (int mode) |
+| |
+|
+bool | presetStreamingCommand (int command) |
+| |
+|
+bool | computeIsocronousSpeeds (const std::vector< double > &q, const std::vector< double > &qd, std::vector< double > &qdot) |
+| |
+|
+void | handleMovj (const std::vector< double > &q, const StateWatcher &watcher) |
+| |
+|
+void | handleMovlVel (const std::vector< double > &q, const StateWatcher &watcher) |
+| |
+|
+void | handleMovlPosd (const std::vector< double > &q, const StateWatcher &watcher) |
+| |
+|
+void | handleMovv (const std::vector< double > &q, const StateWatcher &watcher) |
+| |
+|
+void | handleGcmp (const std::vector< double > &q, const StateWatcher &watcher) |
+| |
+|
+void | handleForc (const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const StateWatcher &watcher) |
+| |
+
+ |
+|
+yarp::dev::PolyDriver | solverDevice |
+| |
+|
+ICartesianSolver * | iCartesianSolver {nullptr} |
+| |
+|
+yarp::dev::PolyDriver | robotDevice |
+| |
+|
+yarp::dev::IControlMode * | iControlMode {nullptr} |
+| |
+|
+yarp::dev::IEncoders * | iEncoders {nullptr} |
+| |
+|
+yarp::dev::IPositionControl * | iPositionControl {nullptr} |
+| |
+|
+yarp::dev::IPositionDirect * | iPositionDirect {nullptr} |
+| |
+|
+yarp::dev::IPreciselyTimed * | iPreciselyTimed {nullptr} |
+| |
+|
+yarp::dev::ITorqueControl * | iTorqueControl {nullptr} |
+| |
+|
+yarp::dev::IVelocityControl * | iVelocityControl {nullptr} |
+| |
+|
+ICartesianSolver::reference_frame | referenceFrame |
+| |
+|
+double | gain |
+| |
+|
+double | duration |
+| |
+|
+int | cmcPeriodMs |
+| |
+|
+int | waitPeriodMs |
+| |
+|
+int | numJoints |
+| |
+|
+int | currentState |
+| |
+|
+int | streamingCommand |
+| |
+|
+bool | usePosdMovl |
+| |
+|
+bool | enableFailFast |
+| |
+|
+std::mutex | stateMutex |
+| |
+| std::vector< double > | vmoStored |
+| |
+| double | movementStartTime |
+| |
+| std::vector< std::unique_ptr< KDL::Trajectory > > | trajectories |
+| |
+| std::vector< double > | fd |
+| |
+|
+int | encoderErrors {0} |
+| |
+|
+std::atomic_bool | cmcSuccess |
+| |
+|
+std::vector< double > | qMin |
+| |
+|
+std::vector< double > | qMax |
+| |
+|
+std::vector< double > | qdotMin |
+| |
+|
+std::vector< double > | qdotMax |
+| |
+|
+std::vector< double > | qRefSpeeds |
+| |
+
+
+
+
◆ act()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::act |
+ ( |
+ int |
+ command | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Send control command to actuate the robot's tool, if available.
+
- Parameters
-
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ forc()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::forc |
+ ( |
+ const std::vector< double > & |
+ fd | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Apply desired forces in task space.
+
- Parameters
-
+
+ | fd | 6-element vector describing desired force exerted by the TCP in cartesian space; first three elements denote linear force (Newton), last three denote torque (Newton*meters). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ gcmp()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::gcmp |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ getParameter()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::getParameter |
+ ( |
+ int |
+ vocab, |
+
+
+ |
+ |
+ double * |
+ value |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Ask the controller to retrieve a parameter of 'double' type.
+
- Parameters
-
+
+ | vocab | YARP-encoded vocab (parameter key). |
+ | value | Parameter value encoded as a double. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ getParameters()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::getParameters |
+ ( |
+ std::map< int, double > & |
+ params | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Ask the controller to retrieve all available parameters at once.
+
- Parameters
-
+
+ | params | Dictionary of YARP-encoded vocabs as keys and their values. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ inv()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::inv |
+ ( |
+ const std::vector< double > & |
+ xd, |
+
+
+ |
+ |
+ std::vector< double > & |
+ q |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Perform inverse kinematics (using robot position as initial guess), but do not move.
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | q | Vector describing current position in joint space (meters or degrees). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ movj()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::movj |
+ ( |
+ const std::vector< double > & |
+ xd | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Perform inverse kinematics and move to desired position in joint space using absolute coordinates.
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- See also
- relj (relative coordinates)
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ movl()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::movl |
+ ( |
+ const std::vector< double > & |
+ xd | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Move to end position along a line trajectory.
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ movv()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::movv |
+ ( |
+ const std::vector< double > & |
+ xdotd | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Move along a line with constant velocity.
+
- Parameters
-
+
+ | xdotd | 6-element vector describing desired velocity in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ pose()
+
+
+
+
+
+
+
+
+ | void BasicCartesianControl::pose |
+ ( |
+ const std::vector< double > & |
+ x | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Move to desired position instantaneously, no further intermediate calculations are expected other than computing the inverse kinematics.
+
- Parameters
-
+
+ | x | 6-element vector describing desired instantaneous pose in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ relj()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::relj |
+ ( |
+ const std::vector< double > & |
+ xd | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Perform inverse kinematics and move to desired position in joint space using relative coordinates.
+
- Parameters
-
+
+ | xd | 6-element vector describing desired offset in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- See also
- movj (absolute coordinates)
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ setParameter()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::setParameter |
+ ( |
+ int |
+ vocab, |
+
+
+ |
+ |
+ double |
+ value |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Ask the controller to store or update a parameter of 'double' type.
+
- Parameters
-
+
+ | vocab | YARP-encoded vocab (parameter key). |
+ | value | Parameter value encoded as a double. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ setParameters()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::setParameters |
+ ( |
+ const std::map< int, double > & |
+ params | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Ask the controller to store or update multiple parameters at once.
+
- Parameters
-
+
+ | params | Dictionary of YARP-encoded vocabs as keys and their values. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ stat()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::stat |
+ ( |
+ std::vector< double > & |
+ x, |
+
+
+ |
+ |
+ int * |
+ state = nullptr, |
+
+
+ |
+ |
+ double * |
+ timestamp = nullptr |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Inform on control state, get robot position and perform forward kinematics.
+
- Parameters
-
+
+ | x | 6-element vector describing current position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | state | Identifier for a cartesian control vocab. |
+ | timestamp | Remote encoder acquisition time. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ stopControl()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::stopControl |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ tool()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::tool |
+ ( |
+ const std::vector< double > & |
+ x | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Unload current tool if any and append new tool frame to the kinematic chain.
+
- Parameters
-
+
+ | x | 6-element vector describing new tool tip with regard to current end-effector frame in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ twist()
+
+
+
+
+
+
+
+
+ | void BasicCartesianControl::twist |
+ ( |
+ const std::vector< double > & |
+ xdot | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Move in instantaneous velocity increments.
+
- Parameters
-
+
+ | xdot | 6-element vector describing velocity increments in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second). |
+
+
+
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ wait()
+
+
+
+
+
+
+
+
+ | bool BasicCartesianControl::wait |
+ ( |
+ double |
+ timeout | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Block execution until the movement is completed, errors occur or timeout is reached.
+
- Parameters
-
+
+ | timeout | Timeout in seconds, '0.0' means no timeout. |
+
+
+
+
- Returns
- true on success, false if errors occurred during the execution of the trajectory
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ wrench()
+
+
+
+
+
+
+
+
+ | void BasicCartesianControl::wrench |
+ ( |
+ const std::vector< double > & |
+ w | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Make the TCP exert the desired force instantaneously.
+
- Parameters
-
+
+ | w | 6-element vector describing desired force exerted by the TCP in cartesian space; first three elements denote linear force (Newton), last three denote torque (Newton*meters). |
+
+
+
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
+
◆ fd
+
+
+
+
+
+
+
+
+ | std::vector<double> roboticslab::BasicCartesianControl::fd |
+
+
+ |
+
+private |
+
+
+
+
FORC desired Cartesian force
+
+
+
+
+
◆ movementStartTime
+
+
+
+
+
+
+
+
+ | double roboticslab::BasicCartesianControl::movementStartTime |
+
+
+ |
+
+private |
+
+
+
+
MOVL keep track of movement start time to know at what time of trajectory movement we are
+
+
+
+
+
◆ trajectories
+
+
+
+
+
+
+
+
+ | std::vector<std::unique_ptr<KDL::Trajectory> > roboticslab::BasicCartesianControl::trajectories |
+
+
+ |
+
+private |
+
+
+
+
MOVL store Cartesian trajectory
+
+
+
+
+
◆ vmoStored
+
+
+
+
+
+
+
+
+ | std::vector<double> roboticslab::BasicCartesianControl::vmoStored |
+
+
+ |
+
+private |
+
+
+
+
MOVJ store previous reference speeds
+
+
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/BasicCartesianControl/BasicCartesianControl.hpp
+- libraries/YarpPlugins/BasicCartesianControl/BasicCartesianControl.cpp
+- libraries/YarpPlugins/BasicCartesianControl/DeviceDriverImpl.cpp
+- libraries/YarpPlugins/BasicCartesianControl/ICartesianControlImpl.cpp
+- libraries/YarpPlugins/BasicCartesianControl/PeriodicThreadImpl.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::BasicCartesianControl::StateWatcher, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+|
+template<typename Fn > |
+| | StateWatcher (Fn &&fn) |
+| |
+|
+void | suppress () const |
+| |
+
+ |
+|
+std::function< void()> | handler |
+| |
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::CartesianControlClient, including all inherited members.
+
+ | act(int command) override | roboticslab::CartesianControlClient | virtual |
+ | close() override (defined in roboticslab::CartesianControlClient) | roboticslab::CartesianControlClient | |
+ | commandPort (defined in roboticslab::CartesianControlClient) | roboticslab::CartesianControlClient | private |
+ | fkInPort (defined in roboticslab::CartesianControlClient) | roboticslab::CartesianControlClient | private |
+ | fkStreamResponder (defined in roboticslab::CartesianControlClient) | roboticslab::CartesianControlClient | private |
+ | fkStreamTimeoutSecs (defined in roboticslab::CartesianControlClient) | roboticslab::CartesianControlClient | private |
+ | forc(const std::vector< double > &fd) override | roboticslab::CartesianControlClient | virtual |
+ | gcmp() override | roboticslab::CartesianControlClient | virtual |
+ | getParameter(int vocab, double *value) override | roboticslab::CartesianControlClient | virtual |
+ | getParameters(std::map< int, double > ¶ms) override | roboticslab::CartesianControlClient | virtual |
+ | handleRpcConsumerCmd(int vocab, const std::vector< double > &in) (defined in roboticslab::CartesianControlClient) | roboticslab::CartesianControlClient | private |
+ | handleRpcFunctionCmd(int vocab, const std::vector< double > &in, std::vector< double > &out) (defined in roboticslab::CartesianControlClient) | roboticslab::CartesianControlClient | private |
+ | handleRpcRunnableCmd(int vocab) (defined in roboticslab::CartesianControlClient) | roboticslab::CartesianControlClient | private |
+ | handleStreamingBiConsumerCmd(int vocab, const std::vector< double > &in1, double in2) (defined in roboticslab::CartesianControlClient) | roboticslab::CartesianControlClient | private |
+ | handleStreamingConsumerCmd(int vocab, const std::vector< double > &in) (defined in roboticslab::CartesianControlClient) | roboticslab::CartesianControlClient | private |
+ | inv(const std::vector< double > &xd, std::vector< double > &q) override | roboticslab::CartesianControlClient | virtual |
+ | movi(const std::vector< double > &x) (defined in roboticslab::ICartesianControl) | roboticslab::ICartesianControl | inlinevirtual |
+ | movj(const std::vector< double > &xd) override | roboticslab::CartesianControlClient | virtual |
+ | movl(const std::vector< double > &xd) override | roboticslab::CartesianControlClient | virtual |
+ | movv(const std::vector< double > &xdotd) override | roboticslab::CartesianControlClient | virtual |
+ | open(yarp::os::Searchable &config) override (defined in roboticslab::CartesianControlClient) | roboticslab::CartesianControlClient | |
+ | pose(const std::vector< double > &x) override | roboticslab::CartesianControlClient | virtual |
+ | relj(const std::vector< double > &xd) override | roboticslab::CartesianControlClient | virtual |
+ | rpcClient (defined in roboticslab::CartesianControlClient) | roboticslab::CartesianControlClient | private |
+ | setParameter(int vocab, double value) override | roboticslab::CartesianControlClient | virtual |
+ | setParameters(const std::map< int, double > ¶ms) override | roboticslab::CartesianControlClient | virtual |
+ | stat(std::vector< double > &x, int *state=nullptr, double *timestamp=nullptr) override | roboticslab::CartesianControlClient | virtual |
+ | stopControl() override | roboticslab::CartesianControlClient | virtual |
+ | tool(const std::vector< double > &x) override | roboticslab::CartesianControlClient | virtual |
+ | twist(const std::vector< double > &xdot) override | roboticslab::CartesianControlClient | virtual |
+ | wait(double timeout) override | roboticslab::CartesianControlClient | virtual |
+ | wrench(const std::vector< double > &w) override | roboticslab::CartesianControlClient | virtual |
+ | ~ICartesianControl()=default | roboticslab::ICartesianControl | virtual |
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
The CartesianControlClient class implements ICartesianControl client side.
+
+
+
#include <CartesianControlClient.hpp>
+
+
+
+

+
+
+
+ |
+| bool | stat (std::vector< double > &x, int *state=nullptr, double *timestamp=nullptr) override |
+| | Current state and position. More...
|
+| |
+| bool | inv (const std::vector< double > &xd, std::vector< double > &q) override |
+| | Inverse kinematics. More...
|
+| |
+| bool | movj (const std::vector< double > &xd) override |
+| | Move in joint space, absolute coordinates. More...
|
+| |
+| bool | relj (const std::vector< double > &xd) override |
+| | Move in joint space, relative coordinates. More...
|
+| |
+| bool | movl (const std::vector< double > &xd) override |
+| | Linear move to target position. More...
|
+| |
+| bool | movv (const std::vector< double > &xdotd) override |
+| | Linear move with given velocity. More...
|
+| |
+| bool | gcmp () override |
+| | Gravity compensation. More...
|
+| |
+| bool | forc (const std::vector< double > &fd) override |
+| | Force control. More...
|
+| |
+| bool | stopControl () override |
+| | Stop control. More...
|
+| |
+| bool | wait (double timeout) override |
+| | Wait until completion. More...
|
+| |
+| bool | tool (const std::vector< double > &x) override |
+| | Change tool. More...
|
+| |
+| bool | act (int command) override |
+| | Actuate tool. More...
|
+| |
+| void | pose (const std::vector< double > &x) override |
+| | Achieve pose. More...
|
+| |
+| void | twist (const std::vector< double > &xdot) override |
+| | Instantaneous velocity steps. More...
|
+| |
+| void | wrench (const std::vector< double > &w) override |
+| | Exert force. More...
|
+| |
+| bool | setParameter (int vocab, double value) override |
+| | Set a configuration parameter. More...
|
+| |
+| bool | getParameter (int vocab, double *value) override |
+| | Retrieve a configuration parameter. More...
|
+| |
+| bool | setParameters (const std::map< int, double > ¶ms) override |
+| | Set multiple configuration parameters. More...
|
+| |
+| bool | getParameters (std::map< int, double > ¶ms) override |
+| | Retrieve multiple configuration parameters. More...
|
+| |
+|
+bool | open (yarp::os::Searchable &config) override |
+| |
+|
+bool | close () override |
+| |
+
+|
+virtual | ~ICartesianControl ()=default |
+| | Destructor.
|
+| |
+|
+virtual void | movi (const std::vector< double > &x) |
+| |
+
+ |
+|
+bool | handleRpcRunnableCmd (int vocab) |
+| |
+|
+bool | handleRpcConsumerCmd (int vocab, const std::vector< double > &in) |
+| |
+|
+bool | handleRpcFunctionCmd (int vocab, const std::vector< double > &in, std::vector< double > &out) |
+| |
+|
+void | handleStreamingConsumerCmd (int vocab, const std::vector< double > &in) |
+| |
+|
+void | handleStreamingBiConsumerCmd (int vocab, const std::vector< double > &in1, double in2) |
+| |
+
+ |
+|
+yarp::os::RpcClient | rpcClient |
+| |
+|
+yarp::os::BufferedPort< yarp::os::Bottle > | fkInPort |
+| |
+|
+yarp::os::BufferedPort< yarp::os::Bottle > | commandPort |
+| |
+|
+FkStreamResponder | fkStreamResponder |
+| |
+|
+double | fkStreamTimeoutSecs |
+| |
+
+
+
+
◆ act()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::act |
+ ( |
+ int |
+ command | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Send control command to actuate the robot's tool, if available.
+
- Parameters
-
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ forc()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::forc |
+ ( |
+ const std::vector< double > & |
+ fd | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Apply desired forces in task space.
+
- Parameters
-
+
+ | fd | 6-element vector describing desired force exerted by the TCP in cartesian space; first three elements denote linear force (Newton), last three denote torque (Newton*meters). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ gcmp()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::gcmp |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ getParameter()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::getParameter |
+ ( |
+ int |
+ vocab, |
+
+
+ |
+ |
+ double * |
+ value |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Ask the controller to retrieve a parameter of 'double' type.
+
- Parameters
-
+
+ | vocab | YARP-encoded vocab (parameter key). |
+ | value | Parameter value encoded as a double. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ getParameters()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::getParameters |
+ ( |
+ std::map< int, double > & |
+ params | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Ask the controller to retrieve all available parameters at once.
+
- Parameters
-
+
+ | params | Dictionary of YARP-encoded vocabs as keys and their values. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ inv()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::inv |
+ ( |
+ const std::vector< double > & |
+ xd, |
+
+
+ |
+ |
+ std::vector< double > & |
+ q |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Perform inverse kinematics (using robot position as initial guess), but do not move.
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | q | Vector describing current position in joint space (meters or degrees). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ movj()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::movj |
+ ( |
+ const std::vector< double > & |
+ xd | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Perform inverse kinematics and move to desired position in joint space using absolute coordinates.
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- See also
- relj (relative coordinates)
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ movl()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::movl |
+ ( |
+ const std::vector< double > & |
+ xd | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Move to end position along a line trajectory.
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ movv()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::movv |
+ ( |
+ const std::vector< double > & |
+ xdotd | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Move along a line with constant velocity.
+
- Parameters
-
+
+ | xdotd | 6-element vector describing desired velocity in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ pose()
+
+
+
+
+
+
+
+
+ | void CartesianControlClient::pose |
+ ( |
+ const std::vector< double > & |
+ x | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Move to desired position instantaneously, no further intermediate calculations are expected other than computing the inverse kinematics.
+
- Parameters
-
+
+ | x | 6-element vector describing desired instantaneous pose in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ relj()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::relj |
+ ( |
+ const std::vector< double > & |
+ xd | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Perform inverse kinematics and move to desired position in joint space using relative coordinates.
+
- Parameters
-
+
+ | xd | 6-element vector describing desired offset in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- See also
- movj (absolute coordinates)
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ setParameter()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::setParameter |
+ ( |
+ int |
+ vocab, |
+
+
+ |
+ |
+ double |
+ value |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Ask the controller to store or update a parameter of 'double' type.
+
- Parameters
-
+
+ | vocab | YARP-encoded vocab (parameter key). |
+ | value | Parameter value encoded as a double. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ setParameters()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::setParameters |
+ ( |
+ const std::map< int, double > & |
+ params | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Ask the controller to store or update multiple parameters at once.
+
- Parameters
-
+
+ | params | Dictionary of YARP-encoded vocabs as keys and their values. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ stat()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::stat |
+ ( |
+ std::vector< double > & |
+ x, |
+
+
+ |
+ |
+ int * |
+ state = nullptr, |
+
+
+ |
+ |
+ double * |
+ timestamp = nullptr |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Inform on control state, get robot position and perform forward kinematics.
+
- Parameters
-
+
+ | x | 6-element vector describing current position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | state | Identifier for a cartesian control vocab. |
+ | timestamp | Remote encoder acquisition time. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ stopControl()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::stopControl |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ tool()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::tool |
+ ( |
+ const std::vector< double > & |
+ x | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Unload current tool if any and append new tool frame to the kinematic chain.
+
- Parameters
-
+
+ | x | 6-element vector describing new tool tip with regard to current end-effector frame in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ twist()
+
+
+
+
+
+
+
+
+ | void CartesianControlClient::twist |
+ ( |
+ const std::vector< double > & |
+ xdot | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Move in instantaneous velocity increments.
+
- Parameters
-
+
+ | xdot | 6-element vector describing velocity increments in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second). |
+
+
+
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ wait()
+
+
+
+
+
+
+
+
+ | bool CartesianControlClient::wait |
+ ( |
+ double |
+ timeout | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Block execution until the movement is completed, errors occur or timeout is reached.
+
- Parameters
-
+
+ | timeout | Timeout in seconds, '0.0' means no timeout. |
+
+
+
+
- Returns
- true on success, false if errors occurred during the execution of the trajectory
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
+
◆ wrench()
+
+
+
+
+
+
+
+
+ | void CartesianControlClient::wrench |
+ ( |
+ const std::vector< double > & |
+ w | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Make the TCP exert the desired force instantaneously.
+
- Parameters
-
+
+ | w | 6-element vector describing desired force exerted by the TCP in cartesian space; first three elements denote linear force (Newton), last three denote torque (Newton*meters). |
+
+
+
+
+
Implements roboticslab::ICartesianControl.
+
+
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/CartesianControlClient/CartesianControlClient.hpp
+- libraries/YarpPlugins/CartesianControlClient/DeviceDriverImpl.cpp
+- libraries/YarpPlugins/CartesianControlClient/ICartesianControlImpl.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::CartesianControlServer, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
The CartesianControlServer class implements ICartesianControl server side.
+
+
+
#include <CartesianControlServer.hpp>
+
+
+
+

+
+
+ |
+|
+bool | open (yarp::os::Searchable &config) override |
+| |
+|
+bool | close () override |
+| |
+|
+void | run () override |
+| |
+
+ |
+|
+yarp::dev::PolyDriver | cartesianControlDevice |
+| |
+|
+yarp::os::RpcServer | rpcServer |
+| |
+|
+yarp::os::RpcServer | rpcTransformServer |
+| |
+|
+yarp::os::BufferedPort< yarp::os::Bottle > | fkOutPort |
+| |
+|
+yarp::os::BufferedPort< yarp::os::Bottle > | commandPort |
+| |
+|
+roboticslab::ICartesianControl * | iCartesianControl {nullptr} |
+| |
+|
+RpcResponder * | rpcResponder {nullptr} |
+| |
+|
+RpcResponder * | rpcTransformResponder {nullptr} |
+| |
+|
+StreamResponder * | streamResponder {nullptr} |
+| |
+|
+bool | fkStreamEnabled |
+| |
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/CartesianControlServer/CartesianControlServer.hpp
+- libraries/YarpPlugins/CartesianControlServer/DeviceDriverImpl.cpp
+- libraries/YarpPlugins/CartesianControlServer/PeriodicThreadImpl.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::CentroidTransform, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
#include <CentroidTransform.hpp>
+
+ |
+|
+StreamingDevice * | streamingDevice |
+| |
+|
+double | permanenceTime |
+| |
+|
+yarp::os::Bottle | lastBottle |
+| |
+|
+yarp::os::Stamp | lastAcquisition |
+| |
+|
+KDL::Rotation | rot_tcp_camera |
+| |
+
+
+
The documentation for this class was generated from the following files:
+- programs/streamingDeviceController/CentroidTransform.hpp
+- programs/streamingDeviceController/CentroidTransform.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ChainFkSolverPos_ST, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
FK solver using Screw Theory.
+ More...
+
+
#include <ChainFkSolverPos_ST.hpp>
+
+
+
+

+
+
+ |
+| int | JntToCart (const KDL::JntArray &q_in, KDL::Frame &p_out, int segmentNr=-1) override |
+| | Perform FK on the selected segment. More...
|
+| |
+| int | JntToCart (const KDL::JntArray &q_in, std::vector< KDL::Frame > &p_out, int segmentNr=-1) override |
+| | Perform FK on the selected segments (unsupported) More...
|
+| |
+| void | updateInternalDataStructures () override |
+| | Update the internal data structures. More...
|
+| |
+| const char * | strError (const int error) const override |
+| | Return a description of the last error. More...
|
+| |
+
+ |
+|
+ | ChainFkSolverPos_ST (const KDL::Chain &chain) |
+| |
+
+
+
Implementation of a forward position kinematics algorithm. This is a thin wrapper around PoeExpression. Methods that retrieve resulting frames for intermediate links are not supported.
+
+
+
◆ create()
+
+
+
+
+
+
+
+
+ | KDL::ChainFkSolverPos * ChainFkSolverPos_ST::create |
+ ( |
+ const KDL::Chain & |
+ chain | ) |
+ |
+
+
+ |
+
+static |
+
+
+
+
- Parameters
-
+
+ | chain | Input kinematic chain. |
+
+
+
+
- Returns
- Solver instance.
+
+
+
+
+
◆ JntToCart() [1/2]
+
+
+
+
+
+
+
+
+ | int ChainFkSolverPos_ST::JntToCart |
+ ( |
+ const KDL::JntArray & |
+ q_in, |
+
+
+ |
+ |
+ KDL::Frame & |
+ p_out, |
+
+
+ |
+ |
+ int |
+ segmentNr = -1 |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+override |
+
+
+
+
- Parameters
-
+
+ | q_in | Input joint coordinates. |
+ | p_out | Reference to output cartesian pose. |
+ | segmentNr | Desired segment frame (unsupported). |
+
+
+
+
- Returns
- Return code, < 0 if something went wrong.
+
+
+
+
+
◆ JntToCart() [2/2]
+
+
+
+
+
+
+
+
+ | int ChainFkSolverPos_ST::JntToCart |
+ ( |
+ const KDL::JntArray & |
+ q_in, |
+
+
+ |
+ |
+ std::vector< KDL::Frame > & |
+ p_out, |
+
+
+ |
+ |
+ int |
+ segmentNr = -1 |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+override |
+
+
+
+
- Parameters
-
+
+ | q_in | Input joint coordinates. |
+ | p_out | Reference to a vector of output cartesian poses for all segments. |
+ | segmentNr | Last selected segment frame. |
+
+
+
+
- Returns
- Return code, < 0 if something went wrong.
+
- Warning
- Unsupported, will return E_OPERATION_NOT_SUPPORTED.
+
+
+
+
+
◆ strError()
+
+
+
+
+
+
+
+
+ | const char * ChainFkSolverPos_ST::strError |
+ ( |
+ const int |
+ error | ) |
+ const |
+
+
+ |
+
+override |
+
+
+
+
- Parameters
-
+
+
+
+
- Returns
- If
error is known then a description of error, otherwise "UNKNOWN ERROR".
+
+
+
+
+
◆ updateInternalDataStructures()
+
+
+
+
+
+
+
+
+ | void ChainFkSolverPos_ST::updateInternalDataStructures |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+override |
+
+
+
+
Update the internal data structures. This is required if the number of segments or number of joints of a chain has changed. This provides a single point of contact for solver memory allocations.
+
+
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/KdlSolver/ChainFkSolverPos_ST.hpp
+- libraries/YarpPlugins/KdlSolver/ChainFkSolverPos_ST.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ChainIkSolverPos_ID, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
IK solver using infinitesimal displacement twists.
+ More...
+
+
#include <ChainIkSolverPos_ID.hpp>
+
+
+
+

+
+
+ |
+| | ChainIkSolverPos_ID (const KDL::Chain &chain, const KDL::JntArray &q_min, const KDL::JntArray &q_max, KDL::ChainFkSolverPos &fksolver) |
+| | Constructor. More...
|
+| |
+| int | CartToJnt (const KDL::JntArray &q_init, const KDL::Frame &p_in, KDL::JntArray &q_out) override |
+| | Calculate inverse position kinematics. More...
|
+| |
+| void | updateInternalDataStructures () override |
+| | Update the internal data structures. More...
|
+| |
+| const char * | strError (const int error) const override |
+| | Return a description of the last error. More...
|
+| |
+
+ |
+|
+static const int | E_FKSOLVERPOS_FAILED = -100 |
+| | Return code, internal FK position solver failed.
|
+| |
+|
+static const int | E_JACSOLVER_FAILED = -101 |
+| | Return code, internal Jacobian solver failed.
|
+| |
+
+ |
+|
+KDL::JntArray | computeDiffInvKin (const KDL::Twist &delta_twist) |
+| |
+
+ |
+|
+const KDL::Chain & | chain |
+| |
+|
+unsigned int | nj |
+| |
+|
+KDL::JntArray | qMin |
+| |
+|
+KDL::JntArray | qMax |
+| |
+|
+KDL::ChainFkSolverPos & | fkSolverPos |
+| |
+|
+KDL::ChainJntToJacSolver | jacSolver |
+| |
+|
+KDL::Jacobian | jacobian |
+| |
+
+
+
Re-implementation of KDL::ChainIkSolverPos_NR_JL in which only one iteration step is performed. Aimed to provide a quick means of obtaining IK whenever the displacements are small enough.
+
+
+
◆ ChainIkSolverPos_ID()
+
+
+
+
+
+ | ChainIkSolverPos_ID::ChainIkSolverPos_ID |
+ ( |
+ const KDL::Chain & |
+ chain, |
+
+
+ |
+ |
+ const KDL::JntArray & |
+ q_min, |
+
+
+ |
+ |
+ const KDL::JntArray & |
+ q_max, |
+
+
+ |
+ |
+ KDL::ChainFkSolverPos & |
+ fksolver |
+
+
+ |
+ ) |
+ | |
+
+
+
+
- Parameters
-
+
+ | chain | The chain to calculate the inverse position for. |
+ | q_min | The minimum joint positions. |
+ | q_max | The maximum joint positions. |
+ | fksolver | A forward position kinematics solver. |
+ | iksolver | An inverse velocity kinematics solver. |
+
+
+
+
+
+
+
+
+
◆ CartToJnt()
+
+
+
+
+
+
+
+
+ | int ChainIkSolverPos_ID::CartToJnt |
+ ( |
+ const KDL::JntArray & |
+ q_init, |
+
+
+ |
+ |
+ const KDL::Frame & |
+ p_in, |
+
+
+ |
+ |
+ KDL::JntArray & |
+ q_out |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+override |
+
+
+
+
- Parameters
-
+
+ | q_init | Initial guess of the joint coordinates (unused). |
+ | p_in | Input cartesian coordinates. |
+ | q_out | Output joint coordinates. |
+
+
+
+
- Returns
- Return code, E_SOLUTION_NOT_FOUND if there is no solution or E_NOT_REACHABLE if at least one of them is out of reach.
+
+
+
+
+
◆ strError()
+
+
+
+
+
+
+
+
+ | const char * ChainIkSolverPos_ID::strError |
+ ( |
+ const int |
+ error | ) |
+ const |
+
+
+ |
+
+override |
+
+
+
+
- Parameters
-
+
+
+
+
- Returns
- If
error is known then a description of error, otherwise "UNKNOWN ERROR".
+
+
+
+
+
◆ updateInternalDataStructures()
+
+
+
+
+
+
+
+
+ | void ChainIkSolverPos_ID::updateInternalDataStructures |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+override |
+
+
+
+
Update the internal data structures. This is required if the number of segments or number of joints of a chain has changed. This provides a single point of contact for solver memory allocations.
+
+
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/KdlSolver/ChainIkSolverPos_ID.hpp
+- libraries/YarpPlugins/KdlSolver/ChainIkSolverPos_ID.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ChainIkSolverPos_ST, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
IK solver using Screw Theory.
+ More...
+
+
#include <ChainIkSolverPos_ST.hpp>
+
+
+
+

+
+
+ |
+|
+static const int | E_SOLUTION_NOT_FOUND = -100 |
+| | Return code, IK solution not found.
|
+| |
+|
+static const int | E_OUT_OF_LIMITS = -101 |
+| | Return code, target pose out of robot limits.
|
+| |
+|
+static const int | E_NOT_REACHABLE = 100 |
+| | Return code, solution out of reach.
|
+| |
+
+
+
Implementation of an inverse position kinematics algorithm. This is a thin wrapper around ScrewTheoryIkProblem. Non-exhaustive tests on TEO's (UC3M) right arm kinematic chain reveal that this is 5-10 faster than a numeric Newton-Raphson solver as provided by KDL (e.g. KDL::ChainIkSolverPos_NR_JL).
+
+
+
◆ CartToJnt()
+
+
+
+
+
+
+
+
+ | int ChainIkSolverPos_ST::CartToJnt |
+ ( |
+ const KDL::JntArray & |
+ q_init, |
+
+
+ |
+ |
+ const KDL::Frame & |
+ p_in, |
+
+
+ |
+ |
+ KDL::JntArray & |
+ q_out |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+override |
+
+
+
+
- Parameters
-
+
+ | q_init | Initial guess of the joint coordinates (unused). |
+ | p_in | Input cartesian coordinates. |
+ | q_out | Output joint coordinates. |
+
+
+
+
- Returns
- Return code, E_SOLUTION_NOT_FOUND if there is no solution or E_NOT_REACHABLE if at least one of them is out of reach.
+
+
+
+
+
◆ create()
+
+
+
+
+
+
+
+
+ | KDL::ChainIkSolverPos * ChainIkSolverPos_ST::create |
+ ( |
+ const KDL::Chain & |
+ chain, |
+
+
+ |
+ |
+ const ConfigurationSelectorFactory & |
+ configFactory |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+static |
+
+
+
+
- Parameters
-
+
+ | chain | Input kinematic chain. |
+ | configFactory | Instance of an abstract factory class that instantiates a ConfigurationSelector. |
+
+
+
+
- Returns
- Solver instance or null if no solution was found.
+
+
+
+
+
◆ strError()
+
+
+
+
+
+
+
+
+ | const char * ChainIkSolverPos_ST::strError |
+ ( |
+ const int |
+ error | ) |
+ const |
+
+
+ |
+
+override |
+
+
+
+
- Parameters
-
+
+
+
+
- Returns
- If
error is known then a description of error, otherwise "UNKNOWN ERROR".
+
+
+
+
+
◆ updateInternalDataStructures()
+
+
+
+
+
+
+
+
+ | void ChainIkSolverPos_ST::updateInternalDataStructures |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+override |
+
+
+
+
Update the internal data structures. This is required if the number of segments or number of joints of a chain has changed. This provides a single point of contact for solver memory allocations.
+
+
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/KdlSolver/ChainIkSolverPos_ST.hpp
+- libraries/YarpPlugins/KdlSolver/ChainIkSolverPos_ST.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ConfigurationSelector, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Abstract base class for a robot configuration strategy selector.
+
+
+
#include <ConfigurationSelector.hpp>
+
+
+
+

+
+
+
+
+
+
◆ ConfigurationSelector()
+
+
+
+
+
+
+
+
+ | roboticslab::ConfigurationSelector::ConfigurationSelector |
+ ( |
+ const KDL::JntArray & |
+ qMin, |
+
+
+ |
+ |
+ const KDL::JntArray & |
+ qMax |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+inline |
+
+
+
+
- Parameters
-
+
+ | qMin | Joint array of minimum joint limits. |
+ | qMax | Joint array of maximum joint limits. |
+
+
+
+
+
+
+
+
+
◆ configure()
+
+
+
+
+
+
+
+
+ | bool ConfigurationSelector::configure |
+ ( |
+ const std::vector< KDL::JntArray > & |
+ solutions | ) |
+ |
+
+
+ |
+
+virtual |
+
+
+
+
- Parameters
-
+
+ | solutions | Vector of joint arrays that represent all available (valid or not) robot joint poses. |
+
+
+
+
- Returns
- True/false on success/failure.
+
+
+
+
+
◆ findOptimalConfiguration()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ConfigurationSelector::findOptimalConfiguration |
+ ( |
+ const KDL::JntArray & |
+ qGuess | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ retrievePose()
+
+
+
+
+
+
+
+
+ | virtual void roboticslab::ConfigurationSelector::retrievePose |
+ ( |
+ KDL::JntArray & |
+ q | ) |
+ const |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ConfigurationSelectorFactory, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Base factory class for ConfigurationSelector.
+ More...
+
+
#include <ConfigurationSelector.hpp>
+
+
+
+

+
+
+
+ |
+|
+KDL::JntArray | _qMin |
+| |
+|
+KDL::JntArray | _qMax |
+| |
+
+
+
Acts as the base class in the abstract factory pattern, encapsulates individual factories.
+
+
+
◆ ConfigurationSelectorFactory()
+
+
+
+
+
+
+
+
+ | roboticslab::ConfigurationSelectorFactory::ConfigurationSelectorFactory |
+ ( |
+ const KDL::JntArray & |
+ qMin, |
+
+
+ |
+ |
+ const KDL::JntArray & |
+ qMax |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+inlineprotected |
+
+
+
+
- Parameters
-
+
+ | qMin | Joint array of minimum joint limits. |
+ | qMax | Joint array of maximum joint limits. |
+
+
+
+
+
+
+
+
+
◆ create()
+
+
+
+
+
+ |
+
+ |
+
+pure virtual |
+
+
+
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ConfigurationSelectorHumanoidGait, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
IK solver configuration strategy selector based on human walking.
+ More...
+
+
#include <ConfigurationSelector.hpp>
+
+
+
+

+
+
+
+ |
+|
+bool | applyConstraints (const Configuration &config) |
+| | Determines whether the configuration is valid according to this selector's premises.
|
+| |
+
+ |
+
+|
+std::vector< double > | getDiffs (const KDL::JntArray &qGuess, const Configuration &config) |
+| | Obtains vector of differences between current and desired joint values.
|
+| |
+
+|
+int | lastValid |
+| |
+
+|
+KDL::JntArray | _qMin |
+| |
+|
+KDL::JntArray | _qMax |
+| |
+|
+Configuration | optimalConfig |
+| |
+|
+std::vector< Configuration > | configs |
+| |
+
+|
+static const int | INVALID_CONFIG = -1 |
+| |
+
+
+
Intended for use on lower-body limbs, specifically UC3M TEO's 6-DOF legs. Discards non-human-like configurations, such as the inverted knee pose.
+
+
+
◆ ConfigurationSelectorHumanoidGait()
+
+
+
+
+
+
+
+
+ | roboticslab::ConfigurationSelectorHumanoidGait::ConfigurationSelectorHumanoidGait |
+ ( |
+ const KDL::JntArray & |
+ qMin, |
+
+
+ |
+ |
+ const KDL::JntArray & |
+ qMax |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+inline |
+
+
+
+
- Parameters
-
+
+ | qMin | Joint array of minimum joint limits. |
+ | qMax | Joint array of maximum joint limits. |
+
+
+
+
+
+
+
+
+
◆ findOptimalConfiguration()
+
+
+
+
+
+
+
+
+ | bool ConfigurationSelectorHumanoidGait::findOptimalConfiguration |
+ ( |
+ const KDL::JntArray & |
+ qGuess | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ConfigurationSelectorHumanoidGaitFactory, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Implementation factory class for ConfigurationSelectorHumanoidGait.
+ More...
+
+
#include <ConfigurationSelector.hpp>
+
+
+
+

+
+
+
+
+
+
+
◆ ConfigurationSelectorHumanoidGaitFactory()
+
+
+
+
+
+
+
+
+ | roboticslab::ConfigurationSelectorHumanoidGaitFactory::ConfigurationSelectorHumanoidGaitFactory |
+ ( |
+ const KDL::JntArray & |
+ qMin, |
+
+
+ |
+ |
+ const KDL::JntArray & |
+ qMax |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+inline |
+
+
+
+
- Parameters
-
+
+ | qMin | Joint array of minimum joint limits. |
+ | qMax | Joint array of maximum joint limits. |
+
+
+
+
+
+
+
+
+
◆ create()
+
+
+
+
+
+
+
+
+ | ConfigurationSelector* roboticslab::ConfigurationSelectorHumanoidGaitFactory::create |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+inlineoverridevirtual |
+
+
+
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ConfigurationSelectorLeastOverallAngularDisplacement, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
IK solver configuration strategy selector based on the overall displacement of all joints.
+ More...
+
+
#include <ConfigurationSelector.hpp>
+
+
+
+

+
+
+
+ |
+|
+std::vector< double > | getDiffs (const KDL::JntArray &qGuess, const Configuration &config) |
+| | Obtains vector of differences between current and desired joint values.
|
+| |
+
+ |
+|
+int | lastValid |
+| |
+
+|
+KDL::JntArray | _qMin |
+| |
+|
+KDL::JntArray | _qMax |
+| |
+|
+Configuration | optimalConfig |
+| |
+|
+std::vector< Configuration > | configs |
+| |
+
+ |
+|
+static const int | INVALID_CONFIG = -1 |
+| |
+
+
+
Selects the configuration that entails the lowest sum of displacements across all joints. Works best for all revolute/all prismatic chain types. If attainable, it retains the previous configuration after the first successful choice and discards all other configs for the rest of the instance's lifetime.
+
+
+
◆ ConfigurationSelectorLeastOverallAngularDisplacement()
+
+
+
+
+
+
+
+
+ | roboticslab::ConfigurationSelectorLeastOverallAngularDisplacement::ConfigurationSelectorLeastOverallAngularDisplacement |
+ ( |
+ const KDL::JntArray & |
+ qMin, |
+
+
+ |
+ |
+ const KDL::JntArray & |
+ qMax |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+inline |
+
+
+
+
- Parameters
-
+
+ | qMin | Joint array of minimum joint limits. |
+ | qMax | Joint array of maximum joint limits. |
+
+
+
+
+
+
+
+
+
◆ findOptimalConfiguration()
+
+
+
+
+
+
+
+
+ | bool ConfigurationSelectorLeastOverallAngularDisplacement::findOptimalConfiguration |
+ ( |
+ const KDL::JntArray & |
+ qGuess | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
The documentation for this class was generated from the following files:
+- libraries/ScrewTheoryLib/ConfigurationSelector.hpp
+- libraries/ScrewTheoryLib/ConfigurationSelectorLeastOverallAngularDisplacement.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ConfigurationSelectorLeastOverallAngularDisplacementFactory, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Implementation factory class for ConfigurationSelectorLeastOverallAngularDisplacement.
+ More...
+
+
#include <ConfigurationSelector.hpp>
+
+
+
+

+
+
+
+
+
+
+
◆ ConfigurationSelectorLeastOverallAngularDisplacementFactory()
+
+
+
+
+
+
+
+
+ | roboticslab::ConfigurationSelectorLeastOverallAngularDisplacementFactory::ConfigurationSelectorLeastOverallAngularDisplacementFactory |
+ ( |
+ const KDL::JntArray & |
+ qMin, |
+
+
+ |
+ |
+ const KDL::JntArray & |
+ qMax |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+inline |
+
+
+
+
- Parameters
-
+
+ | qMin | Joint array of minimum joint limits. |
+ | qMax | Joint array of maximum joint limits. |
+
+
+
+
+
+
+
+
+
◆ create()
+
+
+
+
+
+
+
+
+ | ConfigurationSelector* roboticslab::ConfigurationSelectorLeastOverallAngularDisplacementFactory::create |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+inlineoverridevirtual |
+
+
+
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ConfigurationSelector::Configuration, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Helper class to store a specific robot configuration.
+
+
+
#include <ConfigurationSelector.hpp>
+
+ |
+|
+ | Configuration () |
+| | Constructor.
|
+| |
+|
+void | store (const KDL::JntArray *q) |
+| | Initializes joint values.
|
+| |
+|
+void | validate (const KDL::JntArray &qMin, const KDL::JntArray &qMax) |
+| | Checks reachability against provided joint limits.
|
+| |
+|
+const KDL::JntArray * | retrievePose () const |
+| | Retrieves stored joint values.
|
+| |
+|
+bool | isValid () const |
+| | Whether this configuration is attainable or not.
|
+| |
+|
+void | invalidate () |
+| | Mark this configuration as invalid.
|
+| |
+
+ |
+|
+const KDL::JntArray * | q |
+| |
+|
+bool | valid |
+| |
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::FkStreamResponder, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Responds to streaming FK messages.
+
+
+
#include <CartesianControlClient.hpp>
+
+
+
+

+
+
+ |
+|
+void | onRead (yarp::os::Bottle &b) override |
+| |
+|
+bool | getLastStatData (std::vector< double > &x, int *state, double *timestamp, double timeout) |
+| |
+
+ |
+|
+double | localArrivalTime |
+| |
+|
+int | state |
+| |
+|
+double | timestamp |
+| |
+|
+std::vector< double > | x |
+| |
+|
+std::mutex | mtx |
+| |
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/CartesianControlClient/CartesianControlClient.hpp
+- libraries/YarpPlugins/CartesianControlClient/FkStreamResponder.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::FtCompensation, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Produces motion in the direction of an externally applied force measured by a force-torque sensor (pretty much mimicking a classical gravity compensation app).
+
+
+
#include <FtCompensation.hpp>
+
+
+
+

+
+
+ |
+|
+bool | configure (yarp::os::ResourceFinder &rf) override |
+| |
+|
+bool | updateModule () override |
+| |
+|
+bool | interruptModule () override |
+| |
+|
+double | getPeriod () override |
+| |
+|
+bool | close () override |
+| |
+
+ |
+|
+void | run () override |
+| |
+
+ |
+|
+using | cartesian_cmd = void(ICartesianControl::*)(const std::vector< double > &) |
+| |
+
+ |
+|
+bool | readSensor (KDL::Wrench &wrench) const |
+| |
+|
+bool | compensateTool (KDL::Wrench &wrench) const |
+| |
+|
+bool | applyImpedance (KDL::Wrench &wrench) |
+| |
+
+ |
+|
+yarp::dev::PolyDriver | cartesianDevice |
+| |
+|
+ICartesianControl * | iCartesianControl |
+| |
+|
+int | sensorIndex |
+| |
+|
+yarp::dev::PolyDriver | sensorDevice |
+| |
+|
+yarp::dev::ISixAxisForceTorqueSensors * | sensor |
+| |
+|
+KDL::Rotation | R_N_sensor |
+| |
+|
+KDL::Vector | toolCoM_N |
+| |
+|
+KDL::Wrench | toolWeight_0 |
+| |
+|
+KDL::Wrench | initialOffset |
+| |
+|
+KDL::Frame | initialPose |
+| |
+|
+KDL::Frame | previousPose |
+| |
+|
+cartesian_cmd | command |
+| |
+|
+bool | dryRun |
+| |
+|
+bool | usingTool |
+| |
+|
+bool | enableImpedance |
+| |
+|
+double | linGain |
+| |
+|
+double | rotGain |
+| |
+|
+double | linStiffness |
+| |
+|
+double | rotStiffness |
+| |
+|
+double | linDamping |
+| |
+|
+double | rotDamping |
+| |
+|
+double | forceDeadband |
+| |
+|
+double | torqueDeadband |
+| |
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::GrabberResponder, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Callback class for dealing with incoming grabber data streams.
+
+
+
#include <GrabberResponder.hpp>
+
+
+
+

+
+
+ |
+|
+void | onRead (yarp::os::Bottle &b) override |
+| |
+|
+void | setICartesianControlDriver (roboticslab::ICartesianControl *iCartesianControl) |
+| |
+|
+void | setNoApproachSetting (bool noApproach) |
+| |
+
+
The documentation for this class was generated from the following files:
+- programs/haarDetectionController/GrabberResponder.hpp
+- programs/haarDetectionController/GrabberResponder.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::HaarDetectionController, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Create seek-and-follow trajectories based on Haar detection algorithms.
+
+
+
#include <HaarDetectionController.hpp>
+
+
+
+

+
+
+ |
+|
+bool | configure (yarp::os::ResourceFinder &rf) override |
+| |
+|
+bool | updateModule () override |
+| |
+|
+bool | interruptModule () override |
+| |
+|
+bool | close () override |
+| |
+|
+double | getPeriod () override |
+| |
+
+ |
+|
+GrabberResponder | grabberResponder |
+| |
+|
+yarp::os::BufferedPort< yarp::os::Bottle > | grabberPort |
+| |
+|
+yarp::dev::PolyDriver | cartesianControlDevice |
+| |
+|
+roboticslab::ICartesianControl * | iCartesianControl |
+| |
+|
+yarp::dev::PolyDriver | sensorsClientDevice |
+| |
+|
+roboticslab::IProximitySensors * | iProximitySensors |
+| |
+|
+double | period |
+| |
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ICartesianControl, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Abstract base class for a cartesian controller.
+
+
+
#include <ICartesianControl.h>
+
+
+
+

+
+
+
+ |
+|
+virtual | ~ICartesianControl ()=default |
+| | Destructor.
|
+| |
+ |
+
+ RPC commands with success/failure response.
+ |
+| virtual bool | stat (std::vector< double > &x, int *state=nullptr, double *timestamp=nullptr)=0 |
+| | Current state and position. More...
|
+| |
+| virtual bool | inv (const std::vector< double > &xd, std::vector< double > &q)=0 |
+| | Inverse kinematics. More...
|
+| |
+| virtual bool | movj (const std::vector< double > &xd)=0 |
+| | Move in joint space, absolute coordinates. More...
|
+| |
+| virtual bool | relj (const std::vector< double > &xd)=0 |
+| | Move in joint space, relative coordinates. More...
|
+| |
+| virtual bool | movl (const std::vector< double > &xd)=0 |
+| | Linear move to target position. More...
|
+| |
+| virtual bool | movv (const std::vector< double > &xdotd)=0 |
+| | Linear move with given velocity. More...
|
+| |
+| virtual bool | gcmp ()=0 |
+| | Gravity compensation. More...
|
+| |
+| virtual bool | forc (const std::vector< double > &fd)=0 |
+| | Force control. More...
|
+| |
+| virtual bool | stopControl ()=0 |
+| | Stop control. More...
|
+| |
+| virtual bool | wait (double timeout=0.0)=0 |
+| | Wait until completion. More...
|
+| |
+| virtual bool | tool (const std::vector< double > &x)=0 |
+| | Change tool. More...
|
+| |
+| virtual bool | act (int command)=0 |
+| | Actuate tool. More...
|
+| |
+ |
+
+ High-frequency streaming commands, no acknowledge.
+ |
+| virtual void | pose (const std::vector< double > &x)=0 |
+| | Achieve pose. More...
|
+| |
+|
+virtual void | movi (const std::vector< double > &x) |
+| |
+| virtual void | twist (const std::vector< double > &xdot)=0 |
+| | Instantaneous velocity steps. More...
|
+| |
+| virtual void | wrench (const std::vector< double > &w)=0 |
+| | Exert force. More...
|
+| |
+ |
+
+ Configuration setters and getters with success/failure response.
+ |
+| virtual bool | setParameter (int vocab, double value)=0 |
+| | Set a configuration parameter. More...
|
+| |
+| virtual bool | getParameter (int vocab, double *value)=0 |
+| | Retrieve a configuration parameter. More...
|
+| |
+| virtual bool | setParameters (const std::map< int, double > ¶ms)=0 |
+| | Set multiple configuration parameters. More...
|
+| |
+| virtual bool | getParameters (std::map< int, double > ¶ms)=0 |
+| | Retrieve multiple configuration parameters. More...
|
+| |
+
+
+
+
◆ act()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::act |
+ ( |
+ int |
+ command | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ forc()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::forc |
+ ( |
+ const std::vector< double > & |
+ fd | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
Apply desired forces in task space.
+
- Parameters
-
+
+ | fd | 6-element vector describing desired force exerted by the TCP in cartesian space; first three elements denote linear force (Newton), last three denote torque (Newton*meters). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::CartesianControlClient, and roboticslab::BasicCartesianControl.
+
+
+
+
+
◆ gcmp()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::gcmp |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ getParameter()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::getParameter |
+ ( |
+ int |
+ vocab, |
+
+
+ |
+ |
+ double * |
+ value |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ getParameters()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::getParameters |
+ ( |
+ std::map< int, double > & |
+ params | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ inv()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::inv |
+ ( |
+ const std::vector< double > & |
+ xd, |
+
+
+ |
+ |
+ std::vector< double > & |
+ q |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+pure virtual |
+
+
+
+
Perform inverse kinematics (using robot position as initial guess), but do not move.
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | q | Vector describing current position in joint space (meters or degrees). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::CartesianControlClient, and roboticslab::BasicCartesianControl.
+
+
+
+
+
◆ movj()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::movj |
+ ( |
+ const std::vector< double > & |
+ xd | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
Perform inverse kinematics and move to desired position in joint space using absolute coordinates.
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- See also
- relj (relative coordinates)
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::CartesianControlClient, and roboticslab::BasicCartesianControl.
+
+
+
+
+
◆ movl()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::movl |
+ ( |
+ const std::vector< double > & |
+ xd | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
Move to end position along a line trajectory.
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::CartesianControlClient, and roboticslab::BasicCartesianControl.
+
+
+
+
+
◆ movv()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::movv |
+ ( |
+ const std::vector< double > & |
+ xdotd | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
Move along a line with constant velocity.
+
- Parameters
-
+
+ | xdotd | 6-element vector describing desired velocity in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::CartesianControlClient, and roboticslab::BasicCartesianControl.
+
+
+
+
+
◆ pose()
+
+
+
+
+
+
+
+
+ | virtual void roboticslab::ICartesianControl::pose |
+ ( |
+ const std::vector< double > & |
+ x | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
Move to desired position instantaneously, no further intermediate calculations are expected other than computing the inverse kinematics.
+
- Parameters
-
+
+ | x | 6-element vector describing desired instantaneous pose in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
+
Implemented in roboticslab::CartesianControlClient, and roboticslab::BasicCartesianControl.
+
+
+
+
+
◆ relj()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::relj |
+ ( |
+ const std::vector< double > & |
+ xd | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
Perform inverse kinematics and move to desired position in joint space using relative coordinates.
+
- Parameters
-
+
+ | xd | 6-element vector describing desired offset in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- See also
- movj (absolute coordinates)
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::CartesianControlClient, and roboticslab::BasicCartesianControl.
+
+
+
+
+
◆ setParameter()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::setParameter |
+ ( |
+ int |
+ vocab, |
+
+
+ |
+ |
+ double |
+ value |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ setParameters()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::setParameters |
+ ( |
+ const std::map< int, double > & |
+ params | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ stat()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::stat |
+ ( |
+ std::vector< double > & |
+ x, |
+
+
+ |
+ |
+ int * |
+ state = nullptr, |
+
+
+ |
+ |
+ double * |
+ timestamp = nullptr |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+pure virtual |
+
+
+
+
Inform on control state, get robot position and perform forward kinematics.
+
- Parameters
-
+
+ | x | 6-element vector describing current position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | state | Identifier for a cartesian control vocab. |
+ | timestamp | Remote encoder acquisition time. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::CartesianControlClient, and roboticslab::BasicCartesianControl.
+
+
+
+
+
◆ stopControl()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::stopControl |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ tool()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::tool |
+ ( |
+ const std::vector< double > & |
+ x | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
Unload current tool if any and append new tool frame to the kinematic chain.
+
- Parameters
-
+
+ | x | 6-element vector describing new tool tip with regard to current end-effector frame in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::CartesianControlClient, and roboticslab::BasicCartesianControl.
+
+
+
+
+
◆ twist()
+
+
+
+
+
+
+
+
+ | virtual void roboticslab::ICartesianControl::twist |
+ ( |
+ const std::vector< double > & |
+ xdot | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
Move in instantaneous velocity increments.
+
- Parameters
-
+
+ | xdot | 6-element vector describing velocity increments in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second). |
+
+
+
+
+
Implemented in roboticslab::CartesianControlClient, and roboticslab::BasicCartesianControl.
+
+
+
+
+
◆ wait()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianControl::wait |
+ ( |
+ double |
+ timeout = 0.0 | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
Block execution until the movement is completed, errors occur or timeout is reached.
+
- Parameters
-
+
+ | timeout | Timeout in seconds, '0.0' means no timeout. |
+
+
+
+
- Returns
- true on success, false if errors occurred during the execution of the trajectory
+
+
Implemented in roboticslab::CartesianControlClient, and roboticslab::BasicCartesianControl.
+
+
+
+
+
◆ wrench()
+
+
+
+
+
+
+
+
+ | virtual void roboticslab::ICartesianControl::wrench |
+ ( |
+ const std::vector< double > & |
+ w | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
Make the TCP exert the desired force instantaneously.
+
- Parameters
-
+
+ | w | 6-element vector describing desired force exerted by the TCP in cartesian space; first three elements denote linear force (Newton), last three denote torque (Newton*meters). |
+
+
+
+
+
Implemented in roboticslab::CartesianControlClient, and roboticslab::BasicCartesianControl.
+
+
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ICartesianSolver, including all inherited members.
+
+ | appendLink(const std::vector< double > &x)=0 | roboticslab::ICartesianSolver | pure virtual |
+ | BASE_FRAME enum value | roboticslab::ICartesianSolver | |
+ | changeOrigin(const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj)=0 | roboticslab::ICartesianSolver | pure virtual |
+ | diffInvKin(const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame=BASE_FRAME)=0 | roboticslab::ICartesianSolver | pure virtual |
+ | fwdKin(const std::vector< double > &q, std::vector< double > &x)=0 | roboticslab::ICartesianSolver | pure virtual |
+ | getNumJoints()=0 | roboticslab::ICartesianSolver | pure virtual |
+ | getNumTcps()=0 | roboticslab::ICartesianSolver | pure virtual |
+ | invDyn(const std::vector< double > &q, std::vector< double > &t)=0 | roboticslab::ICartesianSolver | pure virtual |
+ | invDyn(const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< std::vector< double >> &fexts, std::vector< double > &t) | roboticslab::ICartesianSolver | inlinevirtual |
+ | invDyn(const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< double > &ftip, std::vector< double > &t, reference_frame frame=BASE_FRAME)=0 | roboticslab::ICartesianSolver | pure virtual |
+ | invKin(const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame=BASE_FRAME)=0 | roboticslab::ICartesianSolver | pure virtual |
+ | poseDiff(const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut)=0 | roboticslab::ICartesianSolver | pure virtual |
+ | reference_frame enum name | roboticslab::ICartesianSolver | |
+ | restoreOriginalChain()=0 | roboticslab::ICartesianSolver | pure virtual |
+ | TCP_FRAME enum value | roboticslab::ICartesianSolver | |
+ | ~ICartesianSolver()=default | roboticslab::ICartesianSolver | virtual |
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Abstract base class for a cartesian solver.
+
+
+
#include <ICartesianSolver.h>
+
+
+
+

+
+
+
+ |
+|
+virtual | ~ICartesianSolver ()=default |
+| | Destructor.
|
+| |
+| virtual int | getNumJoints ()=0 |
+| | Get number of joints for which the solver has been configured. More...
|
+| |
+| virtual int | getNumTcps ()=0 |
+| | Get number of TCPs for which the solver has been configured. More...
|
+| |
+| virtual bool | appendLink (const std::vector< double > &x)=0 |
+| | Append an additional link. More...
|
+| |
+| virtual bool | restoreOriginalChain ()=0 |
+| | Restore original kinematic chain. More...
|
+| |
+| virtual bool | changeOrigin (const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj)=0 |
+| | Change origin in which a pose is expressed. More...
|
+| |
+| virtual bool | fwdKin (const std::vector< double > &q, std::vector< double > &x)=0 |
+| | Perform forward kinematics. More...
|
+| |
+| virtual bool | poseDiff (const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut)=0 |
+| | Obtain difference between supplied pose inputs. More...
|
+| |
+| virtual bool | invKin (const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame=BASE_FRAME)=0 |
+| | Perform inverse kinematics. More...
|
+| |
+| virtual bool | diffInvKin (const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame=BASE_FRAME)=0 |
+| | Perform differential inverse kinematics. More...
|
+| |
+| virtual bool | invDyn (const std::vector< double > &q, std::vector< double > &t)=0 |
+| | Perform inverse dynamics. More...
|
+| |
+| virtual bool | invDyn (const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< std::vector< double >> &fexts, std::vector< double > &t) |
+| | Perform inverse dynamics. More...
|
+| |
+| virtual bool | invDyn (const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< double > &ftip, std::vector< double > &t, reference_frame frame=BASE_FRAME)=0 |
+| | Perform inverse dynamics. More...
|
+| |
+
+
+
+
◆ reference_frame
+
+
+
+
+| Enumerator |
|---|
| BASE_FRAME | Base frame.
+ |
+| TCP_FRAME | End-effector frame (TCP)
+ |
+
+
+
+
+
+
+
◆ appendLink()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianSolver::appendLink |
+ ( |
+ const std::vector< double > & |
+ x | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ changeOrigin()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianSolver::changeOrigin |
+ ( |
+ const std::vector< double > & |
+ x_old_obj, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ x_new_old, |
+
+
+ |
+ |
+ std::vector< double > & |
+ x_new_obj |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+pure virtual |
+
+
+
+
- Parameters
-
+
+ | x_old_obj_in | 6-element vector describing a pose in cartesian space, expressed in the old frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | x_new_old | 6-element vector describing a transformation from the new to the old frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | x_new_obj | 6-element vector describing a pose in cartesian space, expressed in the new frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::KdlTreeSolver, roboticslab::KdlSolver, and roboticslab::AsibotSolver.
+
+
+
+
+
◆ diffInvKin()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianSolver::diffInvKin |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ xdot, |
+
+
+ |
+ |
+ std::vector< double > & |
+ qdot, |
+
+
+ |
+ |
+ reference_frame |
+ frame = BASE_FRAME |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+pure virtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | xdot | 6-element vector describing desired velocity in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second). |
+ | qdot | Vector describing target velocity in joint space (meters/second or degrees/second). |
+ | frame | Points at the reference_frame the desired position is expressed in. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::KdlTreeSolver, roboticslab::KdlSolver, and roboticslab::AsibotSolver.
+
+
+
+
+
◆ fwdKin()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianSolver::fwdKin |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ std::vector< double > & |
+ x |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+pure virtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing a position in joint space (meters or degrees). |
+ | x | 6-element vector describing same position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::KdlTreeSolver, roboticslab::KdlSolver, and roboticslab::AsibotSolver.
+
+
+
+
+
◆ getNumJoints()
+
+
+
+
+
+
+
+
+ | virtual int roboticslab::ICartesianSolver::getNumJoints |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ getNumTcps()
+
+
+
+
+
+
+
+
+ | virtual int roboticslab::ICartesianSolver::getNumTcps |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ invDyn() [1/3]
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianSolver::invDyn |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qdot, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qdotdot, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ ftip, |
+
+
+ |
+ |
+ std::vector< double > & |
+ t, |
+
+
+ |
+ |
+ reference_frame |
+ frame = BASE_FRAME |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+pure virtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | qdot | Vector describing current velocity in joint space (meters/second or degrees/second). |
+ | qdotdot | Vector describing current acceleration in joint space (meters/second² or degrees/second²). |
+ | ftip | Vector describing an external force applied to the robot tip, expressed in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+ | t | 6-element vector describing desired forces in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+ | frame | Points at the reference_frame ftip is expressed in. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::KdlTreeSolver, roboticslab::KdlSolver, and roboticslab::AsibotSolver.
+
+
+
+
+
◆ invDyn() [2/3]
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianSolver::invDyn |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qdot, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qdotdot, |
+
+
+ |
+ |
+ const std::vector< std::vector< double >> & |
+ fexts, |
+
+
+ |
+ |
+ std::vector< double > & |
+ t |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | qdot | Vector describing current velocity in joint space (meters/second or degrees/second). |
+ | qdotdot | Vector describing current acceleration in joint space (meters/second² or degrees/second²). |
+ | fexts | vector of external forces applied to each robot segment, expressed in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+ | t | 6-element vector describing desired forces in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
+
+
+
◆ invDyn() [3/3]
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianSolver::invDyn |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ std::vector< double > & |
+ t |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+pure virtual |
+
+
+
+
Assumes null joint velocities and accelerations, and no external forces.
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | t | 6-element vector describing desired forces in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::KdlTreeSolver, roboticslab::KdlSolver, and roboticslab::AsibotSolver.
+
+
+
+
+
◆ invKin()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianSolver::invKin |
+ ( |
+ const std::vector< double > & |
+ xd, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qGuess, |
+
+
+ |
+ |
+ std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ reference_frame |
+ frame = BASE_FRAME |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+pure virtual |
+
+
+
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | qGuess | Vector describing current position in joint space (meters or degrees). |
+ | q | Vector describing target position in joint space (meters or degrees). |
+ | frame | Points at the reference_frame the desired position is expressed in. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::KdlTreeSolver, roboticslab::KdlSolver, and roboticslab::AsibotSolver.
+
+
+
+
+
◆ poseDiff()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianSolver::poseDiff |
+ ( |
+ const std::vector< double > & |
+ xLhs, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ xRhs, |
+
+
+ |
+ |
+ std::vector< double > & |
+ xOut |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+pure virtual |
+
+
+
+
The result is an infinitesimal displacement twist, i.e. a vector, for which the operation of addition makes physical sense.
+
- Parameters
-
+
+ | xLhs | 6-element vector describing a pose in cartesian space (left hand side); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | xRhs | 6-element vector describing a pose in cartesian space (right hand side); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | xOut | 6-element vector describing a pose in cartesian space (result); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implemented in roboticslab::KdlTreeSolver, roboticslab::KdlSolver, and roboticslab::AsibotSolver.
+
+
+
+
+
◆ restoreOriginalChain()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ICartesianSolver::restoreOriginalChain |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::InvalidDevice, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Represents an invalid device.
+ More...
+
+
#include <StreamingDevice.hpp>
+
+
+
+

+
+
+
+ |
+
+|
+ICartesianControl * | iCartesianControl |
+| |
+|
+std::vector< double > | data |
+| |
+|
+std::vector< bool > | fixedAxes |
+| |
+|
+int | actuatorState |
+| |
+
+
+
A call to isValid() and other interface methods should yield false.
+
+
+
◆ acquireData()
+
+
+
+
+
+
+
+
+ | bool roboticslab::InvalidDevice::acquireData |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+inlineoverridevirtual |
+
+
+
+
+
+
◆ acquireInterfaces()
+
+
+
+
+
+
+
+
+ | bool roboticslab::InvalidDevice::acquireInterfaces |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+inlineoverridevirtual |
+
+
+
+
+
+
◆ sendMovementCommand()
+
+
+
+
+
+
+
+
+ | void roboticslab::InvalidDevice::sendMovementCommand |
+ ( |
+ double |
+ timestamp | ) |
+ |
+
+
+ |
+
+inlineoverridevirtual |
+
+
+
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::KdlSolver, including all inherited members.
+
+ | appendLink(const std::vector< double > &x) override | roboticslab::KdlSolver | virtual |
+ | BASE_FRAME enum value | roboticslab::ICartesianSolver | |
+ | chain | roboticslab::KdlSolver | private |
+ | changeOrigin(const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj) override | roboticslab::KdlSolver | virtual |
+ | close() override (defined in roboticslab::KdlSolver) | roboticslab::KdlSolver | |
+ | diffInvKin(const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame) override | roboticslab::KdlSolver | virtual |
+ | fkSolverPos (defined in roboticslab::KdlSolver) | roboticslab::KdlSolver | private |
+ | fwdKin(const std::vector< double > &q, std::vector< double > &x) override | roboticslab::KdlSolver | virtual |
+ | getNumJoints() override | roboticslab::KdlSolver | virtual |
+ | getNumTcps() override | roboticslab::KdlSolver | virtual |
+ | idSolver (defined in roboticslab::KdlSolver) | roboticslab::KdlSolver | private |
+ | ikSolverPos (defined in roboticslab::KdlSolver) | roboticslab::KdlSolver | private |
+ | ikSolverVel (defined in roboticslab::KdlSolver) | roboticslab::KdlSolver | private |
+ | invDyn(const std::vector< double > &q, std::vector< double > &t) override | roboticslab::KdlSolver | virtual |
+ | invDyn(const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< double > &ftip, std::vector< double > &t, reference_frame frame) override | roboticslab::KdlSolver | virtual |
+ | roboticslab::ICartesianSolver::invDyn(const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< std::vector< double >> &fexts, std::vector< double > &t) | roboticslab::ICartesianSolver | inlinevirtual |
+ | invKin(const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame) override | roboticslab::KdlSolver | virtual |
+ | isQuiet (defined in roboticslab::KdlSolver) | roboticslab::KdlSolver | private |
+ | logc() const (defined in roboticslab::KdlSolver) | roboticslab::KdlSolver | inlineprivate |
+ | mtx (defined in roboticslab::KdlSolver) | roboticslab::KdlSolver | mutableprivate |
+ | open(yarp::os::Searchable &config) override (defined in roboticslab::KdlSolver) | roboticslab::KdlSolver | |
+ | originalChain | roboticslab::KdlSolver | private |
+ | poseDiff(const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut) override | roboticslab::KdlSolver | virtual |
+ | reference_frame enum name | roboticslab::ICartesianSolver | |
+ | restoreOriginalChain() override | roboticslab::KdlSolver | virtual |
+ | TCP_FRAME enum value | roboticslab::ICartesianSolver | |
+ | ~ICartesianSolver()=default | roboticslab::ICartesianSolver | virtual |
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
The KdlSolver class implements ICartesianSolver.
+
+
+
#include <KdlSolver.hpp>
+
+
+
+

+
+
+
+ |
+| int | getNumJoints () override |
+| | Get number of joints for which the solver has been configured. More...
|
+| |
+| int | getNumTcps () override |
+| | Get number of TCPs for which the solver has been configured. More...
|
+| |
+| bool | appendLink (const std::vector< double > &x) override |
+| | Append an additional link. More...
|
+| |
+| bool | restoreOriginalChain () override |
+| | Restore original kinematic chain. More...
|
+| |
+| bool | changeOrigin (const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj) override |
+| | Change origin in which a pose is expressed. More...
|
+| |
+| bool | fwdKin (const std::vector< double > &q, std::vector< double > &x) override |
+| | Perform forward kinematics. More...
|
+| |
+| bool | poseDiff (const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut) override |
+| | Obtain difference between supplied pose inputs. More...
|
+| |
+| bool | invKin (const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame) override |
+| | Perform inverse kinematics. More...
|
+| |
+| bool | diffInvKin (const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame) override |
+| | Perform differential inverse kinematics. More...
|
+| |
+| bool | invDyn (const std::vector< double > &q, std::vector< double > &t) override |
+| | Perform inverse dynamics. More...
|
+| |
+| bool | invDyn (const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< double > &ftip, std::vector< double > &t, reference_frame frame) override |
+| | Perform inverse dynamics. More...
|
+| |
+|
+bool | open (yarp::os::Searchable &config) override |
+| |
+|
+bool | close () override |
+| |
+
+|
+virtual | ~ICartesianSolver ()=default |
+| | Destructor.
|
+| |
+| virtual bool | invDyn (const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< std::vector< double >> &fexts, std::vector< double > &t) |
+| | Perform inverse dynamics. More...
|
+| |
+
+ |
+|
+const yarp::os::LogComponent & | logc () const |
+| |
+
+ |
+|
+std::mutex | mtx |
+| |
+| KDL::Chain | chain |
+| |
+| KDL::Chain | originalChain |
+| |
+|
+KDL::ChainFkSolverPos * | fkSolverPos {nullptr} |
+| |
+|
+KDL::ChainIkSolverPos * | ikSolverPos {nullptr} |
+| |
+|
+KDL::ChainIkSolverVel * | ikSolverVel {nullptr} |
+| |
+|
+KDL::ChainIdSolver * | idSolver {nullptr} |
+| |
+|
+bool | isQuiet |
+| |
+
+
+
+
◆ appendLink()
+
+
+
+
+
+
+
+
+ | bool KdlSolver::appendLink |
+ ( |
+ const std::vector< double > & |
+ x | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | x | 6-element vector describing end-effector frame in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ changeOrigin()
+
+
+
+
+
+
+
+
+ | bool KdlSolver::changeOrigin |
+ ( |
+ const std::vector< double > & |
+ x_old_obj, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ x_new_old, |
+
+
+ |
+ |
+ std::vector< double > & |
+ x_new_obj |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | x_old_obj_in | 6-element vector describing a pose in cartesian space, expressed in the old frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | x_new_old | 6-element vector describing a transformation from the new to the old frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | x_new_obj | 6-element vector describing a pose in cartesian space, expressed in the new frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ diffInvKin()
+
+
+
+
+
+
+
+
+ | bool KdlSolver::diffInvKin |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ xdot, |
+
+
+ |
+ |
+ std::vector< double > & |
+ qdot, |
+
+
+ |
+ |
+ reference_frame |
+ frame |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | xdot | 6-element vector describing desired velocity in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second). |
+ | qdot | Vector describing target velocity in joint space (meters/second or degrees/second). |
+ | frame | Points at the reference_frame the desired position is expressed in. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ fwdKin()
+
+
+
+
+
+
+
+
+ | bool KdlSolver::fwdKin |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ std::vector< double > & |
+ x |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing a position in joint space (meters or degrees). |
+ | x | 6-element vector describing same position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ getNumJoints()
+
+
+
+
+
+
+
+
+ | int KdlSolver::getNumJoints |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ getNumTcps()
+
+
+
+
+
+
+
+
+ | int KdlSolver::getNumTcps |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ invDyn() [1/2]
+
+
+
+
+
+
+
+
+ | bool KdlSolver::invDyn |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qdot, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qdotdot, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ ftip, |
+
+
+ |
+ |
+ std::vector< double > & |
+ t, |
+
+
+ |
+ |
+ reference_frame |
+ frame |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | qdot | Vector describing current velocity in joint space (meters/second or degrees/second). |
+ | qdotdot | Vector describing current acceleration in joint space (meters/second² or degrees/second²). |
+ | ftip | Vector describing an external force applied to the robot tip, expressed in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+ | t | 6-element vector describing desired forces in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+ | frame | Points at the reference_frame ftip is expressed in. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ invDyn() [2/2]
+
+
+
+
+
+
+
+
+ | bool KdlSolver::invDyn |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ std::vector< double > & |
+ t |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Assumes null joint velocities and accelerations, and no external forces.
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | t | 6-element vector describing desired forces in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ invKin()
+
+
+
+
+
+
+
+
+ | bool KdlSolver::invKin |
+ ( |
+ const std::vector< double > & |
+ xd, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qGuess, |
+
+
+ |
+ |
+ std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ reference_frame |
+ frame |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | qGuess | Vector describing current position in joint space (meters or degrees). |
+ | q | Vector describing target position in joint space (meters or degrees). |
+ | frame | Points at the reference_frame the desired position is expressed in. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ poseDiff()
+
+
+
+
+
+
+
+
+ | bool KdlSolver::poseDiff |
+ ( |
+ const std::vector< double > & |
+ xLhs, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ xRhs, |
+
+
+ |
+ |
+ std::vector< double > & |
+ xOut |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
The result is an infinitesimal displacement twist, i.e. a vector, for which the operation of addition makes physical sense.
+
- Parameters
-
+
+ | xLhs | 6-element vector describing a pose in cartesian space (left hand side); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | xRhs | 6-element vector describing a pose in cartesian space (right hand side); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | xOut | 6-element vector describing a pose in cartesian space (result); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ restoreOriginalChain()
+
+
+
+
+
+
+
+
+ | bool KdlSolver::restoreOriginalChain |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
+
◆ chain
+
+
+
+
+
+
+
+
+ | KDL::Chain roboticslab::KdlSolver::chain |
+
+
+ |
+
+private |
+
+
+
+
+
+
◆ originalChain
+
+
+
+
+
+
+
+
+ | KDL::Chain roboticslab::KdlSolver::originalChain |
+
+
+ |
+
+private |
+
+
+
+
To store a copy of the original chain.
+
+
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/KdlSolver/KdlSolver.hpp
+- libraries/YarpPlugins/KdlSolver/DeviceDriverImpl.cpp
+- libraries/YarpPlugins/KdlSolver/ICartesianSolverImpl.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::KdlTreeSolver, including all inherited members.
+
+ | appendLink(const std::vector< double > &x) override | roboticslab::KdlTreeSolver | virtual |
+ | BASE_FRAME enum value | roboticslab::ICartesianSolver | |
+ | changeOrigin(const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj) override | roboticslab::KdlTreeSolver | virtual |
+ | close() override (defined in roboticslab::KdlTreeSolver) | roboticslab::KdlTreeSolver | |
+ | diffInvKin(const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame) override | roboticslab::KdlTreeSolver | virtual |
+ | endpoints (defined in roboticslab::KdlTreeSolver) | roboticslab::KdlTreeSolver | protected |
+ | fkSolverPos (defined in roboticslab::KdlTreeSolver) | roboticslab::KdlTreeSolver | protected |
+ | fwdKin(const std::vector< double > &q, std::vector< double > &x) override | roboticslab::KdlTreeSolver | virtual |
+ | getNumJoints() override | roboticslab::KdlTreeSolver | virtual |
+ | getNumTcps() override | roboticslab::KdlTreeSolver | virtual |
+ | idSolver (defined in roboticslab::KdlTreeSolver) | roboticslab::KdlTreeSolver | protected |
+ | ikSolverPos (defined in roboticslab::KdlTreeSolver) | roboticslab::KdlTreeSolver | protected |
+ | ikSolverVel (defined in roboticslab::KdlTreeSolver) | roboticslab::KdlTreeSolver | protected |
+ | invDyn(const std::vector< double > &q, std::vector< double > &t) override | roboticslab::KdlTreeSolver | virtual |
+ | invDyn(const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< double > &ftip, std::vector< double > &t, reference_frame frame) override | roboticslab::KdlTreeSolver | virtual |
+ | roboticslab::ICartesianSolver::invDyn(const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< std::vector< double >> &fexts, std::vector< double > &t) | roboticslab::ICartesianSolver | inlinevirtual |
+ | invKin(const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame) override | roboticslab::KdlTreeSolver | virtual |
+ | KdlTreeSolver() (defined in roboticslab::KdlTreeSolver) | roboticslab::KdlTreeSolver | inline |
+ | mergedEndpoints (defined in roboticslab::KdlTreeSolver) | roboticslab::KdlTreeSolver | protected |
+ | open(yarp::os::Searchable &config) override (defined in roboticslab::KdlTreeSolver) | roboticslab::KdlTreeSolver | |
+ | poseDiff(const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut) override | roboticslab::KdlTreeSolver | virtual |
+ | reference_frame enum name | roboticslab::ICartesianSolver | |
+ | restoreOriginalChain() override | roboticslab::KdlTreeSolver | virtual |
+ | TCP_FRAME enum value | roboticslab::ICartesianSolver | |
+ | tree (defined in roboticslab::KdlTreeSolver) | roboticslab::KdlTreeSolver | protected |
+ | ~ICartesianSolver()=default | roboticslab::ICartesianSolver | virtual |
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
The KdlTreeSolver class implements ICartesianSolver.
+
+
+
#include <KdlTreeSolver.hpp>
+
+
+
+

+
+
+
+ |
+| int | getNumJoints () override |
+| | Get number of joints for which the solver has been configured. More...
|
+| |
+| int | getNumTcps () override |
+| | Get number of TCPs for which the solver has been configured. More...
|
+| |
+| bool | appendLink (const std::vector< double > &x) override |
+| | Append an additional link. More...
|
+| |
+| bool | restoreOriginalChain () override |
+| | Restore original kinematic chain. More...
|
+| |
+| bool | changeOrigin (const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj) override |
+| | Change origin in which a pose is expressed. More...
|
+| |
+| bool | fwdKin (const std::vector< double > &q, std::vector< double > &x) override |
+| | Perform forward kinematics. More...
|
+| |
+| bool | poseDiff (const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut) override |
+| | Obtain difference between supplied pose inputs. More...
|
+| |
+| bool | invKin (const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame) override |
+| | Perform inverse kinematics. More...
|
+| |
+| bool | diffInvKin (const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame) override |
+| | Perform differential inverse kinematics. More...
|
+| |
+| bool | invDyn (const std::vector< double > &q, std::vector< double > &t) override |
+| | Perform inverse dynamics. More...
|
+| |
+| bool | invDyn (const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< double > &ftip, std::vector< double > &t, reference_frame frame) override |
+| | Perform inverse dynamics. More...
|
+| |
+|
+bool | open (yarp::os::Searchable &config) override |
+| |
+|
+bool | close () override |
+| |
+
+|
+virtual | ~ICartesianSolver ()=default |
+| | Destructor.
|
+| |
+| virtual bool | invDyn (const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< std::vector< double >> &fexts, std::vector< double > &t) |
+| | Perform inverse dynamics. More...
|
+| |
+
+ |
+|
+std::vector< std::string > | endpoints |
+| |
+|
+std::map< std::string, std::string > | mergedEndpoints |
+| |
+|
+KDL::Tree | tree |
+| |
+|
+KDL::TreeFkSolverPos * | fkSolverPos |
+| |
+|
+KDL::TreeIkSolverPos * | ikSolverPos |
+| |
+|
+KDL::TreeIkSolverVel * | ikSolverVel |
+| |
+|
+KDL::TreeIdSolver * | idSolver |
+| |
+
+
+
+
◆ appendLink()
+
+
+
+
+
+
+
+
+ | bool KdlTreeSolver::appendLink |
+ ( |
+ const std::vector< double > & |
+ x | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | x | 6-element vector describing end-effector frame in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ changeOrigin()
+
+
+
+
+
+
+
+
+ | bool KdlTreeSolver::changeOrigin |
+ ( |
+ const std::vector< double > & |
+ x_old_obj, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ x_new_old, |
+
+
+ |
+ |
+ std::vector< double > & |
+ x_new_obj |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | x_old_obj_in | 6-element vector describing a pose in cartesian space, expressed in the old frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | x_new_old | 6-element vector describing a transformation from the new to the old frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | x_new_obj | 6-element vector describing a pose in cartesian space, expressed in the new frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ diffInvKin()
+
+
+
+
+
+
+
+
+ | bool KdlTreeSolver::diffInvKin |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ xdot, |
+
+
+ |
+ |
+ std::vector< double > & |
+ qdot, |
+
+
+ |
+ |
+ reference_frame |
+ frame |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | xdot | 6-element vector describing desired velocity in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second). |
+ | qdot | Vector describing target velocity in joint space (meters/second or degrees/second). |
+ | frame | Points at the reference_frame the desired position is expressed in. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ fwdKin()
+
+
+
+
+
+
+
+
+ | bool KdlTreeSolver::fwdKin |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ std::vector< double > & |
+ x |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing a position in joint space (meters or degrees). |
+ | x | 6-element vector describing same position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ getNumJoints()
+
+
+
+
+
+
+
+
+ | int KdlTreeSolver::getNumJoints |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ getNumTcps()
+
+
+
+
+
+
+
+
+ | int KdlTreeSolver::getNumTcps |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ invDyn() [1/2]
+
+
+
+
+
+
+
+
+ | bool KdlTreeSolver::invDyn |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qdot, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qdotdot, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ ftip, |
+
+
+ |
+ |
+ std::vector< double > & |
+ t, |
+
+
+ |
+ |
+ reference_frame |
+ frame |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | qdot | Vector describing current velocity in joint space (meters/second or degrees/second). |
+ | qdotdot | Vector describing current acceleration in joint space (meters/second² or degrees/second²). |
+ | ftip | Vector describing an external force applied to the robot tip, expressed in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+ | t | 6-element vector describing desired forces in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+ | frame | Points at the reference_frame ftip is expressed in. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ invDyn() [2/2]
+
+
+
+
+
+
+
+
+ | bool KdlTreeSolver::invDyn |
+ ( |
+ const std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ std::vector< double > & |
+ t |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Assumes null joint velocities and accelerations, and no external forces.
+
- Parameters
-
+
+ | q | Vector describing current position in joint space (meters or degrees). |
+ | t | 6-element vector describing desired forces in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ invKin()
+
+
+
+
+
+
+
+
+ | bool KdlTreeSolver::invKin |
+ ( |
+ const std::vector< double > & |
+ xd, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ qGuess, |
+
+
+ |
+ |
+ std::vector< double > & |
+ q, |
+
+
+ |
+ |
+ reference_frame |
+ frame |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | xd | 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | qGuess | Vector describing current position in joint space (meters or degrees). |
+ | q | Vector describing target position in joint space (meters or degrees). |
+ | frame | Points at the reference_frame the desired position is expressed in. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ poseDiff()
+
+
+
+
+
+
+
+
+ | bool KdlTreeSolver::poseDiff |
+ ( |
+ const std::vector< double > & |
+ xLhs, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ xRhs, |
+
+
+ |
+ |
+ std::vector< double > & |
+ xOut |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+overridevirtual |
+
+
+
+
The result is an infinitesimal displacement twist, i.e. a vector, for which the operation of addition makes physical sense.
+
- Parameters
-
+
+ | xLhs | 6-element vector describing a pose in cartesian space (left hand side); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | xRhs | 6-element vector describing a pose in cartesian space (right hand side); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+ | xOut | 6-element vector describing a pose in cartesian space (result); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Implements roboticslab::ICartesianSolver.
+
+
+
+
+
◆ restoreOriginalChain()
+
+
+
+
+
+
+
+
+ | bool KdlTreeSolver::restoreOriginalChain |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/KdlTreeSolver/KdlTreeSolver.hpp
+- libraries/YarpPlugins/KdlTreeSolver/DeviceDriverImpl.cpp
+- libraries/YarpPlugins/KdlTreeSolver/ICartesianSolverImpl.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::KeyboardController, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Sends streaming commands to the cartesian controller from a standard keyboard.
+ More...
+
+
#include <KeyboardController.hpp>
+
+
+
+

+
+
+ |
+| enum | joint {
+ Q1 = 0
+, Q2
+, Q3
+, Q4
+,
+ Q5
+, Q6
+, Q7
+, Q8
+,
+ Q9
+, MAX_JOINTS
+
+ } |
+| |
+| enum | cart {
+ X = 0
+, Y
+, Z
+, ROTX
+,
+ ROTY
+, ROTZ
+, NUM_CART_COORDS
+
+ } |
+| |
+
+ |
+|
+bool | configure (yarp::os::ResourceFinder &rf) override |
+| |
+|
+bool | updateModule () override |
+| |
+|
+bool | interruptModule () override |
+| |
+|
+double | getPeriod () override |
+| |
+|
+bool | close () override |
+| |
+
+ |
+| enum | control_modes { NOT_CONTROLLING
+, JOINT_MODE
+, CARTESIAN_MODE
+ } |
+| |
+
+ |
+|
+template<typename func > |
+| void | incrementOrDecrementJointVelocity (joint q, func op) |
+| |
+|
+template<typename func > |
+| void | incrementOrDecrementCartesianVelocity (cart coord, func op) |
+| |
+|
+void | toggleReferenceFrame () |
+| |
+|
+void | actuateTool (int command) |
+| |
+|
+void | printJointPositions () |
+| |
+|
+void | printCartesianPositions () |
+| |
+|
+void | issueStop () |
+| |
+|
+void | printHelp () |
+| |
+
+ |
+|
+static const std::plus< double > | increment_functor |
+| |
+|
+static const std::minus< double > | decrement_functor |
+| |
+
+
+
Uses the terminal as a simple user interface. Also accepts joint commands if connected to a remote controlboard.
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::LeapMotionSensorDevice, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Represents a LeapMotion device wrapped as an analog sensor by YARP.
+
+
+
#include <LeapMotionSensorDevice.hpp>
+
+
+
+

+
+
+
+ |
+|
+yarp::dev::IAnalogSensor * | iAnalogSensor |
+| |
+|
+bool | usingPose |
+| |
+|
+std::vector< double > | initialTcpOffset |
+| |
+|
+std::vector< double > | initialLeapOffset |
+| |
+|
+KDL::Frame | frame_base_leap |
+| |
+|
+KDL::Frame | frame_ee_leap |
+| |
+|
+KDL::Frame | frame_leap_ee |
+| |
+|
+KDL::Frame | previousPose |
+| |
+|
+double | previousTimestamp |
+| |
+|
+bool | hasActuator |
+| |
+|
+bool | grab |
+| |
+|
+bool | pinch |
+| |
+
+ |
+
+|
+ICartesianControl * | iCartesianControl |
+| |
+|
+std::vector< double > | data |
+| |
+|
+std::vector< bool > | fixedAxes |
+| |
+|
+int | actuatorState |
+| |
+
+
+
+
◆ acquireData()
+
+
+
+
+
+
+
+
+ | bool LeapMotionSensorDevice::acquireData |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ acquireInterfaces()
+
+
+
+
+
+
+
+
+ | bool LeapMotionSensorDevice::acquireInterfaces |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ getActuatorState()
+
+
+
+
+
+
+
+
+ | int LeapMotionSensorDevice::getActuatorState |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ initialize()
+
+
+
+
+
+
+
+
+ | bool LeapMotionSensorDevice::initialize |
+ ( |
+ bool |
+ usingStreamingPreset | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | usingStreamingPreset | Whether the cartesian controller supports streaming command presets or not. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Reimplemented from roboticslab::StreamingDevice.
+
+
+
+
+
◆ sendMovementCommand()
+
+
+
+
+
+
+
+
+ | void LeapMotionSensorDevice::sendMovementCommand |
+ ( |
+ double |
+ timestamp | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ transformData()
+
+
+
+
+
+
+
+
+ | bool LeapMotionSensorDevice::transformData |
+ ( |
+ double |
+ scaling | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | scaling | Scaling factor applied to each data value. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Reimplemented from roboticslab::StreamingDevice.
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::LinearTrajectoryThread, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Periodic thread that encapsulates a linear trajectory.
+
+
+
#include <LinearTrajectoryThread.hpp>
+
+
+
+

+
+
+ |
+|
+ | LinearTrajectoryThread (int period, ICartesianControl *iCartesianControl) |
+| |
+|
+bool | checkStreamingConfig () |
+| |
+|
+bool | configure (const std::vector< double > &vels) |
+| |
+|
+void | useTcpFrame (bool enableTcpFrame) |
+| |
+
+ |
+|
+void | run () override |
+| |
+
+ |
+|
+double | period {0.0} |
+| |
+|
+ICartesianControl * | iCartesianControl {nullptr} |
+| |
+|
+KDL::Trajectory * | trajectory {nullptr} |
+| |
+|
+double | startTime {0.0} |
+| |
+|
+bool | usingStreamingCommandConfig {false} |
+| |
+|
+bool | usingTcpFrame {false} |
+| |
+|
+std::vector< double > | deltaX |
+| |
+|
+std::mutex | mtx |
+| |
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::MatrixExponential, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Abstraction of a term in a product of exponentials (POE) formula.
+ More...
+
+
#include <MatrixExponential.hpp>
+
+ |
+|
+motion | motionType |
+| |
+|
+KDL::Vector | axis |
+| |
+|
+KDL::Vector | origin |
+| |
+
+
+
+
+
◆ motion
+
+
+
+
+| Enumerator |
|---|
| ROTATION | Revolute joint (zero-pitch twist).
+ |
+| TRANSLATION | Prismatic joint (infinite-pitch twist).
+ |
+
+
+
+
+
+
+
◆ MatrixExponential()
+
+
+
+
+
+ | MatrixExponential::MatrixExponential |
+ ( |
+ motion |
+ motionType, |
+
+
+ |
+ |
+ const KDL::Vector & |
+ axis, |
+
+
+ |
+ |
+ const KDL::Vector & |
+ origin = KDL::Vector::Zero() |
+
+
+ |
+ ) |
+ | |
+
+
+
+
- Parameters
-
+
+ | motionType | Screw motion type as defined in motion. |
+ | axis | Screw axis. |
+ | origin | A point along the screw axis (defaults to (0, 0, 0), ignored in prismatic joints). |
+
+
+
+
+
+
+
+
+
◆ asFrame()
+
+
+
+
+
+ | KDL::Frame MatrixExponential::asFrame |
+ ( |
+ double |
+ theta | ) |
+ const |
+
+
+
+
- Parameters
-
+
+ | theta | Input magnitude this screw should be computed at. |
+
+
+
+
- Returns
- Resulting homogeneous transformation matrix.
+
+
+
+
+
◆ changeBase()
+
+
+
+
+
+ | void MatrixExponential::changeBase |
+ ( |
+ const KDL::Frame & |
+ H_new_old | ) |
+ |
+
+
+
+
- Parameters
-
+
+ | H_new_old | Transformation between the new and the old base frame. |
+
+
+
+
- See also
- cloneWithBase
+
+
+
+
+
◆ cloneWithBase()
+
+
+
+
+
+ | MatrixExponential MatrixExponential::cloneWithBase |
+ ( |
+ const KDL::Frame & |
+ H_new_old | ) |
+ const |
+
+
+
+
- Parameters
-
+
+ | H_new_old | Transformation between the new and the old base frame. |
+
+
+
+
- Returns
- An instance referred to the new frame.
+
- See also
- changeBase
+
+
+
+
+
◆ getAxis()
+
+
+
+
+
+
+
+
+ | const KDL::Vector& roboticslab::MatrixExponential::getAxis |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+inline |
+
+
+
+
- Returns
- A vector representing the direction of the screw axis.
+
+
+
+
+
◆ getMotionType()
+
+
+
+
+
+
+
+
+ | motion roboticslab::MatrixExponential::getMotionType |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+inline |
+
+
+
+
- Returns
- A motion type this term has been registered with.
+
+
+
+
+
◆ getOrigin()
+
+
+
+
+
+
+
+
+ | const KDL::Vector& roboticslab::MatrixExponential::getOrigin |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+inline |
+
+
+
+
- Returns
- A vector representing the position of some point along the screw axis.
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::PadenKahanOne, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
First Paden-Kahan subproblem.
+ More...
+
+
#include <ScrewTheoryIkSubproblems.hpp>
+
+
+
+

+
+
+
+ |
+|
+const int | id |
+| |
+|
+const MatrixExponential | exp |
+| |
+|
+const KDL::Vector | p |
+| |
+|
+const KDL::Rotation | axisPow |
+| |
+
+
+
Single solution, single revolute joint geometric IK subproblem given by \( e\,^{\hat{\xi}\,{\theta}} \cdot p = k \) (rotation screw applied to a point).
+
+
+
◆ PadenKahanOne()
+
+
+
+
+
+ | PadenKahanOne::PadenKahanOne |
+ ( |
+ int |
+ id, |
+
+
+ |
+ |
+ const MatrixExponential & |
+ exp, |
+
+
+ |
+ |
+ const KDL::Vector & |
+ p |
+
+
+ |
+ ) |
+ | |
+
+
+
+
- Parameters
-
+
+ | id | Zero-based joint id of the product of exponentials (POE) term. |
+ | exp | POE term. |
+ | p | Characteristic point. |
+
+
+
+
+
+
+
+
+
◆ solve()
+
+
+
+
+
+
+
+
+ | bool PadenKahanOne::solve |
+ ( |
+ const KDL::Frame & |
+ rhs, |
+
+
+ |
+ |
+ const KDL::Frame & |
+ pointTransform, |
+
+
+ |
+ |
+ Solutions & |
+ solutions |
+
+
+ |
+ ) |
+ | const |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Given the product of exponentials (POE) formula \( \prod_i e\,^{\hat{\xi}_i\,{\theta_i}} \cdot H_{ST}(0) = H_{ST}(\theta) \) , , invariant and known terms are rearranged to the right side (rhs) as follows:
+
+\[ \prod_{i=j}^{j+k} e\,^{\hat{\xi}_i\,{\theta_i}} = \left [ \prod_{i=1}^{j-1} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \cdot H_{ST}(\theta) \cdot \left [ H_{ST}(0) \right ]^{-1} \cdot \left [ \prod_{i=j+k+1}^{N} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \]
+
+
where \( j = \{1, 2, ..., N\}, k = \{1, 2, ..., N-1\}, 1 <= j+k <= N \) .
+
Given \( N \) terms in the POE formula, \( j \) of which are unknowns, any characteristic point \( p \) postmultiplying this expression could be rewritten as \( p' \) per:
+
+\[ \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot \prod_{i=j+1}^N e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p = \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p' \]
+
+
where pointTransform is the transformation matrix that produces \( p' \) from \( p \) .
+
- Parameters
-
+
+ | rhs | Right-hand side of the POE formula prior to being applied to the right-hand side of this subproblem. |
+ | pointTransform | Transformation frame applied to the first (and perhaps only) characteristic point of this subproblem. |
+ | solutions | Output vector of local solutions. |
+
+
+
+
- Returns
- True if all solutions are reachable, false otherwise.
+
+
Implements roboticslab::ScrewTheoryIkSubproblem.
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::PadenKahanThree, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Third Paden-Kahan subproblem.
+ More...
+
+
#include <ScrewTheoryIkSubproblems.hpp>
+
+
+
+

+
+
+
+ |
+|
+const int | id |
+| |
+|
+const MatrixExponential | exp |
+| |
+|
+const KDL::Vector | p |
+| |
+|
+const KDL::Vector | k |
+| |
+|
+const KDL::Rotation | axisPow |
+| |
+
+
+
Dual solution, single revolute joint geometric IK subproblem given by \( \left \| e\,^{\hat{\xi}\,{\theta}} \cdot p - k \right \| = \delta \) (rotation screw for moving \( p \) to a distance \( \delta \) from \( k \)).
+
+
+
◆ PadenKahanThree()
+
+
+
+
+
+ | PadenKahanThree::PadenKahanThree |
+ ( |
+ int |
+ id, |
+
+
+ |
+ |
+ const MatrixExponential & |
+ exp, |
+
+
+ |
+ |
+ const KDL::Vector & |
+ p, |
+
+
+ |
+ |
+ const KDL::Vector & |
+ k |
+
+
+ |
+ ) |
+ | |
+
+
+
+
- Parameters
-
+
+ | id | Zero-based joint id of the product of exponentials (POE) term. |
+ | exp | POE term. |
+ | p | First characteristic point. |
+ | k | Second characteristic point. |
+
+
+
+
+
+
+
+
+
◆ solve()
+
+
+
+
+
+
+
+
+ | bool PadenKahanThree::solve |
+ ( |
+ const KDL::Frame & |
+ rhs, |
+
+
+ |
+ |
+ const KDL::Frame & |
+ pointTransform, |
+
+
+ |
+ |
+ Solutions & |
+ solutions |
+
+
+ |
+ ) |
+ | const |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Given the product of exponentials (POE) formula \( \prod_i e\,^{\hat{\xi}_i\,{\theta_i}} \cdot H_{ST}(0) = H_{ST}(\theta) \) , , invariant and known terms are rearranged to the right side (rhs) as follows:
+
+\[ \prod_{i=j}^{j+k} e\,^{\hat{\xi}_i\,{\theta_i}} = \left [ \prod_{i=1}^{j-1} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \cdot H_{ST}(\theta) \cdot \left [ H_{ST}(0) \right ]^{-1} \cdot \left [ \prod_{i=j+k+1}^{N} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \]
+
+
where \( j = \{1, 2, ..., N\}, k = \{1, 2, ..., N-1\}, 1 <= j+k <= N \) .
+
Given \( N \) terms in the POE formula, \( j \) of which are unknowns, any characteristic point \( p \) postmultiplying this expression could be rewritten as \( p' \) per:
+
+\[ \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot \prod_{i=j+1}^N e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p = \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p' \]
+
+
where pointTransform is the transformation matrix that produces \( p' \) from \( p \) .
+
- Parameters
-
+
+ | rhs | Right-hand side of the POE formula prior to being applied to the right-hand side of this subproblem. |
+ | pointTransform | Transformation frame applied to the first (and perhaps only) characteristic point of this subproblem. |
+ | solutions | Output vector of local solutions. |
+
+
+
+
- Returns
- True if all solutions are reachable, false otherwise.
+
+
Implements roboticslab::ScrewTheoryIkSubproblem.
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::PadenKahanTwo, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Second Paden-Kahan subproblem.
+ More...
+
+
#include <ScrewTheoryIkSubproblems.hpp>
+
+
+
+

+
+
+
+ |
+|
+const int | id1 |
+| |
+|
+const int | id2 |
+| |
+|
+const MatrixExponential | exp1 |
+| |
+|
+const MatrixExponential | exp2 |
+| |
+|
+const KDL::Vector | p |
+| |
+|
+const KDL::Vector | r |
+| |
+|
+const KDL::Vector | axesCross |
+| |
+|
+const KDL::Rotation | axisPow1 |
+| |
+|
+const KDL::Rotation | axisPow2 |
+| |
+|
+const double | axesDot |
+| |
+
+
+
Dual solution, double revolute joint geometric IK subproblem given by \( e\,^{\hat{\xi_1}\,{\theta_1}} \cdot e\,^{\hat{\xi_2}\,{\theta_2}} \cdot p = k \) (consecutive crossing rotation screws to a point).
+
+
+
◆ PadenKahanTwo()
+
+
+
+
+
+ | PadenKahanTwo::PadenKahanTwo |
+ ( |
+ int |
+ id1, |
+
+
+ |
+ |
+ int |
+ id2, |
+
+
+ |
+ |
+ const MatrixExponential & |
+ exp1, |
+
+
+ |
+ |
+ const MatrixExponential & |
+ exp2, |
+
+
+ |
+ |
+ const KDL::Vector & |
+ p, |
+
+
+ |
+ |
+ const KDL::Vector & |
+ r |
+
+
+ |
+ ) |
+ | |
+
+
+
+
- Parameters
-
+
+ | id1 | Zero-based joint id of the first product of exponentials (POE) term. |
+ | id2 | Zero-based joint id of the second POE term. |
+ | exp1 | First POE term. |
+ | exp2 | Second POE term. |
+ | p | Characteristic point. |
+ | r | Point of intersection between both screw axes. |
+
+
+
+
+
+
+
+
+
◆ solve()
+
+
+
+
+
+
+
+
+ | bool PadenKahanTwo::solve |
+ ( |
+ const KDL::Frame & |
+ rhs, |
+
+
+ |
+ |
+ const KDL::Frame & |
+ pointTransform, |
+
+
+ |
+ |
+ Solutions & |
+ solutions |
+
+
+ |
+ ) |
+ | const |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Given the product of exponentials (POE) formula \( \prod_i e\,^{\hat{\xi}_i\,{\theta_i}} \cdot H_{ST}(0) = H_{ST}(\theta) \) , , invariant and known terms are rearranged to the right side (rhs) as follows:
+
+\[ \prod_{i=j}^{j+k} e\,^{\hat{\xi}_i\,{\theta_i}} = \left [ \prod_{i=1}^{j-1} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \cdot H_{ST}(\theta) \cdot \left [ H_{ST}(0) \right ]^{-1} \cdot \left [ \prod_{i=j+k+1}^{N} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \]
+
+
where \( j = \{1, 2, ..., N\}, k = \{1, 2, ..., N-1\}, 1 <= j+k <= N \) .
+
Given \( N \) terms in the POE formula, \( j \) of which are unknowns, any characteristic point \( p \) postmultiplying this expression could be rewritten as \( p' \) per:
+
+\[ \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot \prod_{i=j+1}^N e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p = \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p' \]
+
+
where pointTransform is the transformation matrix that produces \( p' \) from \( p \) .
+
- Parameters
-
+
+ | rhs | Right-hand side of the POE formula prior to being applied to the right-hand side of this subproblem. |
+ | pointTransform | Transformation frame applied to the first (and perhaps only) characteristic point of this subproblem. |
+ | solutions | Output vector of local solutions. |
+
+
+
+
- Returns
- True if all solutions are reachable, false otherwise.
+
+
Implements roboticslab::ScrewTheoryIkSubproblem.
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::PardosGotorFour, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Fourth Pardos-Gotor subproblem.
+ More...
+
+
#include <ScrewTheoryIkSubproblems.hpp>
+
+
+
+

+
+
+
+ |
+|
+const int | id1 |
+| |
+|
+const int | id2 |
+| |
+|
+const MatrixExponential | exp1 |
+| |
+|
+const MatrixExponential | exp2 |
+| |
+|
+const KDL::Vector | p |
+| |
+|
+const KDL::Vector | n |
+| |
+|
+const KDL::Rotation | axisPow |
+| |
+
+
+
Dual solution, double revolute joint geometric IK subproblem given by \( e\,^{\hat{\xi_1}\,{\theta_1}} \cdot e\,^{\hat{\xi_2}\,{\theta_2}} \cdot p = k \) (two consecutive parallel rotation screws applied to a point, see [4]).
+
+
+
◆ PardosGotorFour()
+
+
+
+
+
+ | PardosGotorFour::PardosGotorFour |
+ ( |
+ int |
+ id1, |
+
+
+ |
+ |
+ int |
+ id2, |
+
+
+ |
+ |
+ const MatrixExponential & |
+ exp1, |
+
+
+ |
+ |
+ const MatrixExponential & |
+ exp2, |
+
+
+ |
+ |
+ const KDL::Vector & |
+ p |
+
+
+ |
+ ) |
+ | |
+
+
+
+
- Parameters
-
+
+ | id1 | Zero-based joint id of the first product of exponentials (POE) term. |
+ | id2 | Zero-based joint id of the second POE term. |
+ | exp1 | First POE term. |
+ | exp2 | Second POE term. |
+ | p | Characteristic point. |
+
+
+
+
+
+
+
+
+
◆ solve()
+
+
+
+
+
+
+
+
+ | bool PardosGotorFour::solve |
+ ( |
+ const KDL::Frame & |
+ rhs, |
+
+
+ |
+ |
+ const KDL::Frame & |
+ pointTransform, |
+
+
+ |
+ |
+ Solutions & |
+ solutions |
+
+
+ |
+ ) |
+ | const |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Given the product of exponentials (POE) formula \( \prod_i e\,^{\hat{\xi}_i\,{\theta_i}} \cdot H_{ST}(0) = H_{ST}(\theta) \) , , invariant and known terms are rearranged to the right side (rhs) as follows:
+
+\[ \prod_{i=j}^{j+k} e\,^{\hat{\xi}_i\,{\theta_i}} = \left [ \prod_{i=1}^{j-1} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \cdot H_{ST}(\theta) \cdot \left [ H_{ST}(0) \right ]^{-1} \cdot \left [ \prod_{i=j+k+1}^{N} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \]
+
+
where \( j = \{1, 2, ..., N\}, k = \{1, 2, ..., N-1\}, 1 <= j+k <= N \) .
+
Given \( N \) terms in the POE formula, \( j \) of which are unknowns, any characteristic point \( p \) postmultiplying this expression could be rewritten as \( p' \) per:
+
+\[ \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot \prod_{i=j+1}^N e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p = \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p' \]
+
+
where pointTransform is the transformation matrix that produces \( p' \) from \( p \) .
+
- Parameters
-
+
+ | rhs | Right-hand side of the POE formula prior to being applied to the right-hand side of this subproblem. |
+ | pointTransform | Transformation frame applied to the first (and perhaps only) characteristic point of this subproblem. |
+ | solutions | Output vector of local solutions. |
+
+
+
+
- Returns
- True if all solutions are reachable, false otherwise.
+
+
Implements roboticslab::ScrewTheoryIkSubproblem.
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::PardosGotorOne, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
First Pardos-Gotor subproblem.
+ More...
+
+
#include <ScrewTheoryIkSubproblems.hpp>
+
+
+
+

+
+
+
+
+
Single solution, single prismatic joint geometric IK subproblem given by \( e\,^{\hat{\xi}\,{\theta}} \cdot p = k \) (translation screw applied to a point, see [4]).
+
+
+
◆ PardosGotorOne()
+
+
+
+
+
+ | PardosGotorOne::PardosGotorOne |
+ ( |
+ int |
+ id, |
+
+
+ |
+ |
+ const MatrixExponential & |
+ exp, |
+
+
+ |
+ |
+ const KDL::Vector & |
+ p |
+
+
+ |
+ ) |
+ | |
+
+
+
+
- Parameters
-
+
+ | id | Zero-based joint id of the product of exponentials (POE) term. |
+ | exp | POE term. |
+ | p | Characteristic point. |
+
+
+
+
+
+
+
+
+
◆ solve()
+
+
+
+
+
+
+
+
+ | bool PardosGotorOne::solve |
+ ( |
+ const KDL::Frame & |
+ rhs, |
+
+
+ |
+ |
+ const KDL::Frame & |
+ pointTransform, |
+
+
+ |
+ |
+ Solutions & |
+ solutions |
+
+
+ |
+ ) |
+ | const |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Given the product of exponentials (POE) formula \( \prod_i e\,^{\hat{\xi}_i\,{\theta_i}} \cdot H_{ST}(0) = H_{ST}(\theta) \) , , invariant and known terms are rearranged to the right side (rhs) as follows:
+
+\[ \prod_{i=j}^{j+k} e\,^{\hat{\xi}_i\,{\theta_i}} = \left [ \prod_{i=1}^{j-1} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \cdot H_{ST}(\theta) \cdot \left [ H_{ST}(0) \right ]^{-1} \cdot \left [ \prod_{i=j+k+1}^{N} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \]
+
+
where \( j = \{1, 2, ..., N\}, k = \{1, 2, ..., N-1\}, 1 <= j+k <= N \) .
+
Given \( N \) terms in the POE formula, \( j \) of which are unknowns, any characteristic point \( p \) postmultiplying this expression could be rewritten as \( p' \) per:
+
+\[ \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot \prod_{i=j+1}^N e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p = \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p' \]
+
+
where pointTransform is the transformation matrix that produces \( p' \) from \( p \) .
+
- Parameters
-
+
+ | rhs | Right-hand side of the POE formula prior to being applied to the right-hand side of this subproblem. |
+ | pointTransform | Transformation frame applied to the first (and perhaps only) characteristic point of this subproblem. |
+ | solutions | Output vector of local solutions. |
+
+
+
+
- Returns
- True if all solutions are reachable, false otherwise.
+
+
Implements roboticslab::ScrewTheoryIkSubproblem.
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::PardosGotorThree, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Third Pardos-Gotor subproblem.
+ More...
+
+
#include <ScrewTheoryIkSubproblems.hpp>
+
+
+
+

+
+
+
+ |
+|
+const int | id |
+| |
+|
+const MatrixExponential | exp |
+| |
+|
+const KDL::Vector | p |
+| |
+|
+const KDL::Vector | k |
+| |
+
+
+
Dual solution, single prismatic joint geometric IK subproblem given by \( \left \| e\,^{\hat{\xi}\,{\theta}} \cdot p - k \right \| = \delta \) (translation screw for moving \( p \) to a distance \( \delta \) from \( k \), see [4]).
+
+
+
◆ PardosGotorThree()
+
+
+
+
+
+ | PardosGotorThree::PardosGotorThree |
+ ( |
+ int |
+ id, |
+
+
+ |
+ |
+ const MatrixExponential & |
+ exp, |
+
+
+ |
+ |
+ const KDL::Vector & |
+ p, |
+
+
+ |
+ |
+ const KDL::Vector & |
+ k |
+
+
+ |
+ ) |
+ | |
+
+
+
+
- Parameters
-
+
+ | id | Zero-based joint id of the product of exponentials (POE) term. |
+ | exp | POE term. |
+ | p | First characteristic point. |
+ | k | Second characteristic point. |
+
+
+
+
+
+
+
+
+
◆ solve()
+
+
+
+
+
+
+
+
+ | bool PardosGotorThree::solve |
+ ( |
+ const KDL::Frame & |
+ rhs, |
+
+
+ |
+ |
+ const KDL::Frame & |
+ pointTransform, |
+
+
+ |
+ |
+ Solutions & |
+ solutions |
+
+
+ |
+ ) |
+ | const |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Given the product of exponentials (POE) formula \( \prod_i e\,^{\hat{\xi}_i\,{\theta_i}} \cdot H_{ST}(0) = H_{ST}(\theta) \) , , invariant and known terms are rearranged to the right side (rhs) as follows:
+
+\[ \prod_{i=j}^{j+k} e\,^{\hat{\xi}_i\,{\theta_i}} = \left [ \prod_{i=1}^{j-1} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \cdot H_{ST}(\theta) \cdot \left [ H_{ST}(0) \right ]^{-1} \cdot \left [ \prod_{i=j+k+1}^{N} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \]
+
+
where \( j = \{1, 2, ..., N\}, k = \{1, 2, ..., N-1\}, 1 <= j+k <= N \) .
+
Given \( N \) terms in the POE formula, \( j \) of which are unknowns, any characteristic point \( p \) postmultiplying this expression could be rewritten as \( p' \) per:
+
+\[ \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot \prod_{i=j+1}^N e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p = \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p' \]
+
+
where pointTransform is the transformation matrix that produces \( p' \) from \( p \) .
+
- Parameters
-
+
+ | rhs | Right-hand side of the POE formula prior to being applied to the right-hand side of this subproblem. |
+ | pointTransform | Transformation frame applied to the first (and perhaps only) characteristic point of this subproblem. |
+ | solutions | Output vector of local solutions. |
+
+
+
+
- Returns
- True if all solutions are reachable, false otherwise.
+
+
Implements roboticslab::ScrewTheoryIkSubproblem.
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::PardosGotorTwo, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Second Pardos-Gotor subproblem.
+ More...
+
+
#include <ScrewTheoryIkSubproblems.hpp>
+
+
+
+

+
+
+
+ |
+|
+const int | id1 |
+| |
+|
+const int | id2 |
+| |
+|
+const MatrixExponential | exp1 |
+| |
+|
+const MatrixExponential | exp2 |
+| |
+|
+const KDL::Vector | p |
+| |
+|
+const KDL::Vector | crossPr2 |
+| |
+|
+const double | crossPr2Norm |
+| |
+
+
+
Single solution, double prismatic joint geometric IK subproblem given by \( e\,^{\hat{\xi_1}\,{\theta_1}} \cdot e\,^{\hat{\xi_2}\,{\theta_2}} \cdot p = k \) (consecutive translation screws to a point, see [4]).
+
+
+
◆ PardosGotorTwo()
+
+
+
+
+
+ | PardosGotorTwo::PardosGotorTwo |
+ ( |
+ int |
+ id1, |
+
+
+ |
+ |
+ int |
+ id2, |
+
+
+ |
+ |
+ const MatrixExponential & |
+ exp1, |
+
+
+ |
+ |
+ const MatrixExponential & |
+ exp2, |
+
+
+ |
+ |
+ const KDL::Vector & |
+ p |
+
+
+ |
+ ) |
+ | |
+
+
+
+
- Parameters
-
+
+ | id1 | Zero-based joint id of the first product of exponentials (POE) term. |
+ | id2 | Zero-based joint id of the second POE term. |
+ | exp1 | First POE term. |
+ | exp2 | Second POE term. |
+ | p | Characteristic point. |
+
+
+
+
+
+
+
+
+
◆ solve()
+
+
+
+
+
+
+
+
+ | bool PardosGotorTwo::solve |
+ ( |
+ const KDL::Frame & |
+ rhs, |
+
+
+ |
+ |
+ const KDL::Frame & |
+ pointTransform, |
+
+
+ |
+ |
+ Solutions & |
+ solutions |
+
+
+ |
+ ) |
+ | const |
+
+
+ |
+
+overridevirtual |
+
+
+
+
Given the product of exponentials (POE) formula \( \prod_i e\,^{\hat{\xi}_i\,{\theta_i}} \cdot H_{ST}(0) = H_{ST}(\theta) \) , , invariant and known terms are rearranged to the right side (rhs) as follows:
+
+\[ \prod_{i=j}^{j+k} e\,^{\hat{\xi}_i\,{\theta_i}} = \left [ \prod_{i=1}^{j-1} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \cdot H_{ST}(\theta) \cdot \left [ H_{ST}(0) \right ]^{-1} \cdot \left [ \prod_{i=j+k+1}^{N} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \]
+
+
where \( j = \{1, 2, ..., N\}, k = \{1, 2, ..., N-1\}, 1 <= j+k <= N \) .
+
Given \( N \) terms in the POE formula, \( j \) of which are unknowns, any characteristic point \( p \) postmultiplying this expression could be rewritten as \( p' \) per:
+
+\[ \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot \prod_{i=j+1}^N e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p = \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p' \]
+
+
where pointTransform is the transformation matrix that produces \( p' \) from \( p \) .
+
- Parameters
-
+
+ | rhs | Right-hand side of the POE formula prior to being applied to the right-hand side of this subproblem. |
+ | pointTransform | Transformation frame applied to the first (and perhaps only) characteristic point of this subproblem. |
+ | solutions | Output vector of local solutions. |
+
+
+
+
- Returns
- True if all solutions are reachable, false otherwise.
+
+
Implements roboticslab::ScrewTheoryIkSubproblem.
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::PoeExpression, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Abstraction of a product of exponentials (POE) formula.
+ More...
+
+
#include <ProductOfExponentials.hpp>
+
+
+
This entity is comprised of a sequence of matrix exponentials and a transformation between the base and the tool frame.
+
- See also
- MatrixExponential
+
+
+
◆ PoeExpression()
+
+
+
+
+
+
+
+
+ | roboticslab::PoeExpression::PoeExpression |
+ ( |
+ const KDL::Frame & |
+ H_S_T = KDL::Frame::Identity() | ) |
+ |
+
+
+ |
+
+inlineexplicit |
+
+
+
+
- Parameters
-
+
+ | H_S_T | Transformation between the base and the tool frame. |
+
+
+
+
+
+
+
+
+
◆ append() [1/2]
+
+
+
+
+
+
+
+
+ | void roboticslab::PoeExpression::append |
+ ( |
+ const MatrixExponential & |
+ exp, |
+
+
+ |
+ |
+ const KDL::Frame & |
+ H_new_old = KDL::Frame::Identity() |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+inline |
+
+
+
+
All internal coordinates of the input POE term are referred to the current base frame after applying an (optional) intermediate transformation.
+
- Parameters
-
+
+ | exp | Input POE term. |
+ | H_new_old | Transformation between the base frame of this POE and the base frame of the input POE term. |
+
+
+
+
+
+
+
+
◆ append() [2/2]
+
+
+
+
+
+ | void PoeExpression::append |
+ ( |
+ const PoeExpression & |
+ poe, |
+
+
+ |
+ |
+ const KDL::Frame & |
+ H_new_old = KDL::Frame::Identity() |
+
+
+ |
+ ) |
+ | |
+
+
+
+
All internal coordinates of the input POE are referred to the current base frame after applying an (optional) intermediate transformation. The current tool frame is replaced by the appended POE's tool frame and updated in the same manner.
+
- Parameters
-
+
+ | poe | Input POE formula. |
+ | H_new_old | Transformation between the new and the old base frame. |
+
+
+
+
+
+
+
+
◆ changeBaseFrame()
+
+
+
+
+
+ | void PoeExpression::changeBaseFrame |
+ ( |
+ const KDL::Frame & |
+ H_new_old | ) |
+ |
+
+
+
+
All POE terms as well as the base-to-tool reference frame will be updated accordingly.
+
- Parameters
-
+
+ | H_new_old | Transformation between the new and the old base frame. |
+
+
+
+
+
+
+
+
◆ changeToolFrame()
+
+
+
+
+
+
+
+
+ | void roboticslab::PoeExpression::changeToolFrame |
+ ( |
+ const KDL::Frame & |
+ H_new_old | ) |
+ |
+
+
+ |
+
+inline |
+
+
+
+
- Parameters
-
+
+ | H_new_old | Transformation between the new and the old tool frame. |
+
+
+
+
+
+
+
+
◆ evaluate()
+
+
+
+
+
+ | bool PoeExpression::evaluate |
+ ( |
+ const KDL::JntArray & |
+ q, |
+
+
+ |
+ |
+ KDL::Frame & |
+ H |
+
+
+ |
+ ) |
+ | const |
+
+
+
+
- Parameters
-
+
+ | q | Input joint array (radians). |
+ | H | Output pose in cartesian space. |
+
+
+
+
- Returns
- False if the size of the input joint array does not match the size of this POE.
+
+
+
+
+
◆ exponentialAtJoint()
+
+
+
+
+
+
+
+
+ | const MatrixExponential& roboticslab::PoeExpression::exponentialAtJoint |
+ ( |
+ int |
+ i | ) |
+ const |
+
+
+ |
+
+inline |
+
+
+
+
- Parameters
-
+
+ | i | Zero-based index of the requested term. |
+
+
+
+
- Returns
- An unmodifiable reference to said term.
+
+
+
+
+
◆ fromChain()
+
+
+
+
+
+
+
+
+ | PoeExpression PoeExpression::fromChain |
+ ( |
+ const KDL::Chain & |
+ chain | ) |
+ |
+
+
+ |
+
+static |
+
+
+
+
- Parameters
-
+
+ | chain | A KDL kinematic chain representation. |
+
+
+
+
- Returns
- The resulting POE formula.
+
- See also
- toChain
+
+
+
+
+
◆ getTransform()
+
+
+
+
+
+
+
+
+ | const KDL::Frame& roboticslab::PoeExpression::getTransform |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+inline |
+
+
+
+
- Returns
- Transformation between the base and the tool frame.
+
+
+
+
+
◆ makeReverse()
+
+
+
+
The sequence of POE terms is reversed and the base and tool frames interchanged. Note that theta_i = -theta_(size-i)_reversed.
+
- Returns
- A reversed copy of this instance.
+
- See also
- reverseSelf
+
+
+
+
+
◆ reverseSelf()
+
+
+
+
+
+ | void PoeExpression::reverseSelf |
+ ( |
+ | ) |
+ |
+
+
+
+
The sequence of POE terms is reversed and the base and tool frames interchanged. Note that theta_i = -theta_(size-i)_reversed.
+
- See also
- makeReverse
+
+
+
+
+
◆ size()
+
+
+
+
+
+
+
+
+ | int roboticslab::PoeExpression::size |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+inline |
+
+
+
+
- Returns
- Number of terms in this POE formula.
+
+
+
+
+
◆ toChain()
+
+
+
+
+
+ | KDL::Chain PoeExpression::toChain |
+ ( |
+ | ) |
+ const |
+
+
+
+
- Returns
- A KDL kinematic chain representation.
+
- See also
- fromChain
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::RpcResponder, including all inherited members.
+
+ | ConsumerFun typedef (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | FunctionFun typedef (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleActMsg(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleConsumerCmdMsg(const yarp::os::Bottle &in, yarp::os::Bottle &out, ConsumerFun cmd) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleFunctionCmdMsg(const yarp::os::Bottle &in, yarp::os::Bottle &out, FunctionFun cmd) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleParameterGetter(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleParameterGetterGroup(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleParameterSetter(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleParameterSetterGroup(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleRunnableCmdMsg(const yarp::os::Bottle &in, yarp::os::Bottle &out, RunnableFun cmd) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleStatMsg(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleWaitMsg(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | iCartesianControl (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | makeUsage() | roboticslab::RpcResponder | |
+ | respond(const yarp::os::Bottle &in, yarp::os::Bottle &out) override | roboticslab::RpcResponder | |
+ | RpcResponder(roboticslab::ICartesianControl *_iCartesianControl) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | inline |
+ | RunnableFun typedef (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | transformIncomingData(std::vector< double > &vin) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | inlineprotectedvirtual |
+ | transformOutgoingData(std::vector< double > &vout) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | inlineprotectedvirtual |
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Responds to RPC command messages.
+
+
+
#include <CartesianControlServer.hpp>
+
+
+
+

+
+
+
+ |
+|
+virtual bool | transformIncomingData (std::vector< double > &vin) |
+| |
+|
+virtual bool | transformOutgoingData (std::vector< double > &vout) |
+| |
+
+ |
+|
+using | RunnableFun = bool(ICartesianControl::*)() |
+| |
+|
+using | ConsumerFun = bool(ICartesianControl::*)(const std::vector< double > &) |
+| |
+|
+using | FunctionFun = bool(ICartesianControl::*)(const std::vector< double > &, std::vector< double > &) |
+| |
+
+ |
+|
+bool | handleStatMsg (const yarp::os::Bottle &in, yarp::os::Bottle &out) |
+| |
+|
+bool | handleWaitMsg (const yarp::os::Bottle &in, yarp::os::Bottle &out) |
+| |
+|
+bool | handleActMsg (const yarp::os::Bottle &in, yarp::os::Bottle &out) |
+| |
+|
+bool | handleRunnableCmdMsg (const yarp::os::Bottle &in, yarp::os::Bottle &out, RunnableFun cmd) |
+| |
+|
+bool | handleConsumerCmdMsg (const yarp::os::Bottle &in, yarp::os::Bottle &out, ConsumerFun cmd) |
+| |
+|
+bool | handleFunctionCmdMsg (const yarp::os::Bottle &in, yarp::os::Bottle &out, FunctionFun cmd) |
+| |
+|
+bool | handleParameterSetter (const yarp::os::Bottle &in, yarp::os::Bottle &out) |
+| |
+|
+bool | handleParameterGetter (const yarp::os::Bottle &in, yarp::os::Bottle &out) |
+| |
+|
+bool | handleParameterSetterGroup (const yarp::os::Bottle &in, yarp::os::Bottle &out) |
+| |
+|
+bool | handleParameterGetterGroup (const yarp::os::Bottle &in, yarp::os::Bottle &out) |
+| |
+
+
+
+
◆ makeUsage()
+
+
+
+
+
+ | void RpcResponder::makeUsage |
+ ( |
+ | ) |
+ |
+
+
+
+
Generate command usage information.
+
+
+
+
+
◆ respond()
+
+
+
+
+
+
+
+
+ | bool RpcResponder::respond |
+ ( |
+ const yarp::os::Bottle & |
+ in, |
+
+
+ |
+ |
+ yarp::os::Bottle & |
+ out |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+override |
+
+
+
+
Respond to a message.
- Parameters
-
+
+ | in | the message |
+ | out | the response |
+
+
+
+
- Returns
- true if there was no critical failure
+
+
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/CartesianControlServer/CartesianControlServer.hpp
+- libraries/YarpPlugins/CartesianControlServer/RpcResponder.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::RpcTransformResponder, including all inherited members.
+
+ | ConsumerFun typedef (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | coord (defined in roboticslab::RpcTransformResponder) | roboticslab::RpcTransformResponder | private |
+ | FunctionFun typedef (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleActMsg(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleConsumerCmdMsg(const yarp::os::Bottle &in, yarp::os::Bottle &out, ConsumerFun cmd) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleFunctionCmdMsg(const yarp::os::Bottle &in, yarp::os::Bottle &out, FunctionFun cmd) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleParameterGetter(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleParameterGetterGroup(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleParameterSetter(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleParameterSetterGroup(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleRunnableCmdMsg(const yarp::os::Bottle &in, yarp::os::Bottle &out, RunnableFun cmd) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleStatMsg(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | handleWaitMsg(const yarp::os::Bottle &in, yarp::os::Bottle &out) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | iCartesianControl (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | makeUsage() | roboticslab::RpcResponder | |
+ | orient (defined in roboticslab::RpcTransformResponder) | roboticslab::RpcTransformResponder | private |
+ | respond(const yarp::os::Bottle &in, yarp::os::Bottle &out) override | roboticslab::RpcResponder | |
+ | RpcResponder(roboticslab::ICartesianControl *_iCartesianControl) (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | inline |
+ | RpcTransformResponder(roboticslab::ICartesianControl *iCartesianControl, KinRepresentation::coordinate_system coord, KinRepresentation::orientation_system orient, KinRepresentation::angular_units units) (defined in roboticslab::RpcTransformResponder) | roboticslab::RpcTransformResponder | inline |
+ | RunnableFun typedef (defined in roboticslab::RpcResponder) | roboticslab::RpcResponder | private |
+ | transformIncomingData(std::vector< double > &vin) override (defined in roboticslab::RpcTransformResponder) | roboticslab::RpcTransformResponder | privatevirtual |
+ | transformOutgoingData(std::vector< double > &vout) override (defined in roboticslab::RpcTransformResponder) | roboticslab::RpcTransformResponder | privatevirtual |
+ | units (defined in roboticslab::RpcTransformResponder) | roboticslab::RpcTransformResponder | private |
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Responds to RPC command messages, transforms incoming data.
+
+
+
#include <CartesianControlServer.hpp>
+
+
+
+

+
+
+
+ |
+|
+bool | transformIncomingData (std::vector< double > &vin) override |
+| |
+|
+bool | transformOutgoingData (std::vector< double > &vout) override |
+| |
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/CartesianControlServer/CartesianControlServer.hpp
+- libraries/YarpPlugins/CartesianControlServer/RpcResponder.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ScrewTheoryIkProblem, including all inherited members.
+
+ | create(const PoeExpression &poe, const Steps &steps, bool reversed=false) | roboticslab::ScrewTheoryIkProblem | static |
+ | EXP_COMPUTED enum value (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | EXP_KNOWN enum value (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | EXP_UNKNOWN enum value (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | Frames typedef (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | getSteps() const | roboticslab::ScrewTheoryIkProblem | inline |
+ | isReversed() const | roboticslab::ScrewTheoryIkProblem | inline |
+ | operator=(const ScrewTheoryIkProblem &)=delete (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | |
+ | poe (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | poe_term enum name (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | PoeTerms typedef (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | recalculateFrames(const Solutions &solutions, Frames &frames, PoeTerms &poeTerms) (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | recalculateFrames(const Solutions &solutions, Frames &frames, PoeTerms &poeTerms, bool backwards) (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | reversed (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | ScrewTheoryIkProblem(const ScrewTheoryIkProblem &)=delete (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | |
+ | ScrewTheoryIkProblem(const PoeExpression &poe, const Steps &steps, bool reversed) (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | soln (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | Solutions typedef | roboticslab::ScrewTheoryIkProblem | |
+ | solutions() const | roboticslab::ScrewTheoryIkProblem | inline |
+ | solve(const KDL::Frame &H_S_T, Solutions &solutions) | roboticslab::ScrewTheoryIkProblem | |
+ | Steps typedef | roboticslab::ScrewTheoryIkProblem | |
+ | steps (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | transformPoint(const KDL::JntArray &jointValues, const PoeTerms &poeTerms) (defined in roboticslab::ScrewTheoryIkProblem) | roboticslab::ScrewTheoryIkProblem | private |
+ | ~ScrewTheoryIkProblem() | roboticslab::ScrewTheoryIkProblem | |
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Proxy IK problem solver class that iterates over a sequence of subproblems.
+ More...
+
+
#include <ScrewTheoryIkProblem.hpp>
+
+ |
+|
+using | Steps = std::vector< const ScrewTheoryIkSubproblem * > |
+| | Ordered sequence of IK subproblems needed to solve a IK problem.
|
+| |
+|
+using | Solutions = std::vector< KDL::JntArray > |
+| | Collection of global IK solutions.
|
+| |
+
+ |
+| enum | poe_term { EXP_KNOWN
+, EXP_COMPUTED
+, EXP_UNKNOWN
+ } |
+| |
+|
+using | Frames = std::vector< KDL::Frame > |
+| |
+|
+using | PoeTerms = std::vector< poe_term > |
+| |
+
+ |
+|
+ | ScrewTheoryIkProblem (const PoeExpression &poe, const Steps &steps, bool reversed) |
+| |
+|
+void | recalculateFrames (const Solutions &solutions, Frames &frames, PoeTerms &poeTerms) |
+| |
+|
+bool | recalculateFrames (const Solutions &solutions, Frames &frames, PoeTerms &poeTerms, bool backwards) |
+| |
+|
+KDL::Frame | transformPoint (const KDL::JntArray &jointValues, const PoeTerms &poeTerms) |
+| |
+
+ |
+|
+const PoeExpression | poe |
+| |
+|
+const Steps | steps |
+| |
+|
+const bool | reversed |
+| |
+|
+const int | soln |
+| |
+
+
+
This class is immutable. Instantiation is allowed by means of a static builder method.
+
- See also
- ScrewTheoryIkProblemBuilder
+
+
+
◆ create()
+
+
+
+
- Parameters
-
+
+ | poe | A product of exponentials (POE) formula. |
+ | steps | Collection of subproblems that solve this particular IK problem. |
+ | reversed | True if the POE has been reversed (in order to find a valid solution). |
+
+
+
+
- Returns
- An instance of an IK problem solver.
+
+
+
+
+
◆ solve()
+
+
+
+
+
+ | bool ScrewTheoryIkProblem::solve |
+ ( |
+ const KDL::Frame & |
+ H_S_T, |
+
+
+ |
+ |
+ Solutions & |
+ solutions |
+
+
+ |
+ ) |
+ | |
+
+
+
+
- Parameters
-
+
+ | H_S_T | Target pose in cartesian space. |
+ | solutions | Output vector of solutions stored as joint arrays. |
+
+
+
+
- Returns
- True if all solutions are reachable, false otherwise.
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ScrewTheoryIkProblemBuilder, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Automated IK solution finder.
+ More...
+
+
#include <ScrewTheoryIkProblem.hpp>
+
+ |
+| struct | PoeTerm |
+| | Helper structure that holds the state of a POE term. More...
|
+| |
+
+ |
+|
+ScrewTheoryIkProblem::Steps | searchSolutions () |
+| |
+|
+void | refreshSimplificationState () |
+| |
+|
+void | simplify (int depth) |
+| |
+|
+void | simplifyWithPadenKahanOne (const KDL::Vector &point) |
+| |
+|
+void | simplifyWithPadenKahanThree (const KDL::Vector &point) |
+| |
+|
+void | simplifyWithPardosOne () |
+| |
+|
+ScrewTheoryIkSubproblem * | trySolve (int depth) |
+| |
+
+ |
+|
+static std::vector< KDL::Vector > | searchPoints (const PoeExpression &poe) |
+| |
+
+ |
+|
+PoeExpression | poe |
+| |
+|
+std::vector< KDL::Vector > | points |
+| |
+|
+std::vector< KDL::Vector > | testPoints |
+| |
+|
+std::vector< PoeTerm > | poeTerms |
+| |
+
+ |
+|
+static const int | MAX_SIMPLIFICATION_DEPTH = 2 |
+| |
+
+
+
This class helps to automate the process for configuring a valid IK problem given its geometric data only. It is intended to take care of the generation and configuration of known subproblems, whereas particular joint-space solutions are meant to be computed on runtime by ScrewTheoryIkProblem.
+
+
+
◆ ScrewTheoryIkProblemBuilder()
+
+
+
+
+
+ | ScrewTheoryIkProblemBuilder::ScrewTheoryIkProblemBuilder |
+ ( |
+ const PoeExpression & |
+ poe | ) |
+ |
+
+
+
+
- Parameters
-
+
+ | poe | Product of exponentials (POE) formula. |
+
+
+
+
+
+
+
+
+
◆ build()
+
+
+
+
- Returns
- An instance of an IK problem solver if valid, null otherwise.
+
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ScrewTheoryIkSubproblem, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Interface shared by all IK subproblems found in Screw Theory applied to Robotics.
+ More...
+
+
#include <ScrewTheoryIkProblem.hpp>
+
+
+
+

+
+
+
+ |
+|
+virtual | ~ScrewTheoryIkSubproblem ()=default |
+| | Destructor.
|
+| |
+| virtual bool | solve (const KDL::Frame &rhs, const KDL::Frame &pointTransform, Solutions &solutions) const =0 |
+| | Finds a closed geometric solution for this IK subproblem. More...
|
+| |
+|
+virtual int | solutions () const =0 |
+| | Number of local IK solutions.
|
+| |
+|
+virtual const char * | describe () const =0 |
+| | Return a human-readable description of this IK subproblem.
|
+| |
+
+
+
Derived classes are considered to be immutable.
+
+
+
◆ solve()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::ScrewTheoryIkSubproblem::solve |
+ ( |
+ const KDL::Frame & |
+ rhs, |
+
+
+ |
+ |
+ const KDL::Frame & |
+ pointTransform, |
+
+
+ |
+ |
+ Solutions & |
+ solutions |
+
+
+ |
+ ) |
+ | const |
+
+
+ |
+
+pure virtual |
+
+
+
+
Given the product of exponentials (POE) formula \( \prod_i e\,^{\hat{\xi}_i\,{\theta_i}} \cdot H_{ST}(0) = H_{ST}(\theta) \) , , invariant and known terms are rearranged to the right side (rhs) as follows:
+
+\[ \prod_{i=j}^{j+k} e\,^{\hat{\xi}_i\,{\theta_i}} = \left [ \prod_{i=1}^{j-1} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \cdot H_{ST}(\theta) \cdot \left [ H_{ST}(0) \right ]^{-1} \cdot \left [ \prod_{i=j+k+1}^{N} e\,^{\hat{\xi}_i\,{\theta_i}} \right ]^{-1} \]
+
+
where \( j = \{1, 2, ..., N\}, k = \{1, 2, ..., N-1\}, 1 <= j+k <= N \) .
+
Given \( N \) terms in the POE formula, \( j \) of which are unknowns, any characteristic point \( p \) postmultiplying this expression could be rewritten as \( p' \) per:
+
+\[ \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot \prod_{i=j+1}^N e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p = \prod_{i=1}^j e\,^{\hat{\xi}_i\,{\theta_i}} \cdot p' \]
+
+
where pointTransform is the transformation matrix that produces \( p' \) from \( p \) .
+
- Parameters
-
+
+ | rhs | Right-hand side of the POE formula prior to being applied to the right-hand side of this subproblem. |
+ | pointTransform | Transformation frame applied to the first (and perhaps only) characteristic point of this subproblem. |
+ | solutions | Output vector of local solutions. |
+
+
+
+
- Returns
- True if all solutions are reachable, false otherwise.
+
+
Implemented in roboticslab::PardosGotorFour, roboticslab::PardosGotorThree, roboticslab::PardosGotorTwo, roboticslab::PardosGotorOne, roboticslab::PadenKahanThree, roboticslab::PadenKahanTwo, and roboticslab::PadenKahanOne.
+
+
+
+
The documentation for this class was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::SpnavSensorDevice, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Represents a spacenav-compatible device, like the SpaceNavigator 6-DOF mouse from 3Dconnexion.
+
+
+
#include <SpnavSensorDevice.hpp>
+
+
+
+

+
+
+
+ |
+|
+yarp::dev::IAnalogSensor * | iAnalogSensor |
+| |
+|
+std::vector< double > | currentX |
+| |
+|
+bool | usingPose |
+| |
+|
+double | gain |
+| |
+|
+bool | buttonClose |
+| |
+|
+bool | buttonOpen |
+| |
+
+ |
+
+|
+ICartesianControl * | iCartesianControl |
+| |
+|
+std::vector< double > | data |
+| |
+|
+std::vector< bool > | fixedAxes |
+| |
+|
+int | actuatorState |
+| |
+
+
+
+
◆ acquireData()
+
+
+
+
+
+
+
+
+ | bool SpnavSensorDevice::acquireData |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ acquireInterfaces()
+
+
+
+
+
+
+
+
+ | bool SpnavSensorDevice::acquireInterfaces |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ getActuatorState()
+
+
+
+
+
+
+
+
+ | int SpnavSensorDevice::getActuatorState |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ hasValidMovementData()
+
+
+
+
+
+
+
+
+ | bool SpnavSensorDevice::hasValidMovementData |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ initialize()
+
+
+
+
+
+
+
+
+ | bool SpnavSensorDevice::initialize |
+ ( |
+ bool |
+ usingStreamingPreset | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | usingStreamingPreset | Whether the cartesian controller supports streaming command presets or not. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Reimplemented from roboticslab::StreamingDevice.
+
+
+
+
+
◆ sendMovementCommand()
+
+
+
+
+
+
+
+
+ | void SpnavSensorDevice::sendMovementCommand |
+ ( |
+ double |
+ timestamp | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ transformData()
+
+
+
+
+
+
+
+
+ | bool SpnavSensorDevice::transformData |
+ ( |
+ double |
+ scaling | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | scaling | Scaling factor applied to each data value. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Reimplemented from roboticslab::StreamingDevice.
+
+
+
+
The documentation for this class was generated from the following files:
+- programs/streamingDeviceController/SpnavSensorDevice.hpp
+- programs/streamingDeviceController/SpnavSensorDevice.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::StreamResponder, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Responds to streaming command messages.
+
+
+
#include <CartesianControlServer.hpp>
+
+
+
+

+
+
+ |
+|
+using | ConsumerFun = void(ICartesianControl::*)(const std::vector< double > &) |
+| |
+|
+using | BiConsumerFun = void(ICartesianControl::*)(const std::vector< double > &, double) |
+| |
+
+ |
+|
+void | handleConsumerCmdMsg (const yarp::os::Bottle &in, ConsumerFun cmd) |
+| |
+|
+void | handleBiConsumerCmdMsg (const yarp::os::Bottle &in, BiConsumerFun cmd) |
+| |
+
+
The documentation for this class was generated from the following files:
+- libraries/YarpPlugins/CartesianControlServer/CartesianControlServer.hpp
+- libraries/YarpPlugins/CartesianControlServer/StreamResponder.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::StreamingDevice, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Abstract class for a YARP streaming device.
+
+
+
#include <StreamingDevice.hpp>
+
+
+
+

+
+
+
+ |
+|
+ICartesianControl * | iCartesianControl |
+| |
+|
+std::vector< double > | data |
+| |
+|
+std::vector< bool > | fixedAxes |
+| |
+|
+int | actuatorState |
+| |
+
+ |
+|
+void | configureFixedAxes (const yarp::os::Value &v) |
+| | Stores vector of values representing axes that are always fixed.
|
+| |
+
+ |
+|
+friend | CentroidTransform |
+| |
+
+
+
+
◆ StreamingDevice()
+
+
+
+
+
+ | StreamingDevice::StreamingDevice |
+ ( |
+ yarp::os::Searchable & |
+ config | ) |
+ |
+
+
+
+
- Parameters
-
+
+ | config | List of options the YARP device should be opened with. |
+
+
+
+
+
+
+
+
+
◆ acquireData()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::StreamingDevice::acquireData |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ acquireInterfaces()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::StreamingDevice::acquireInterfaces |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ getActuatorState()
+
+
+
+
+
+
+
+
+ | virtual int roboticslab::StreamingDevice::getActuatorState |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
+
+
◆ hasValidMovementData()
+
+
+
+
+
+
+
+
+ | bool StreamingDevice::hasValidMovementData |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+virtual |
+
+
+
+
+
+
◆ initialize()
+
+
+
+
+
+
+
+
+ | virtual bool roboticslab::StreamingDevice::initialize |
+ ( |
+ bool |
+ usingStreamingPreset | ) |
+ |
+
+
+ |
+
+inlinevirtual |
+
+
+
+
+
+
◆ sendMovementCommand()
+
+
+
+
+
+
+
+
+ | virtual void roboticslab::StreamingDevice::sendMovementCommand |
+ ( |
+ double |
+ timestamp | ) |
+ |
+
+
+ |
+
+pure virtual |
+
+
+
+
+
+
◆ setCartesianControllerHandle()
+
+
+
+
+
+
+
+
+ | void roboticslab::StreamingDevice::setCartesianControllerHandle |
+ ( |
+ ICartesianControl * |
+ iCartesianControl | ) |
+ |
+
+
+ |
+
+inline |
+
+
+
+
+
+
◆ transformData()
+
+
+
+
+
+
+
+
+ | bool StreamingDevice::transformData |
+ ( |
+ double |
+ scaling | ) |
+ |
+
+
+ |
+
+virtual |
+
+
+
+
+
The documentation for this class was generated from the following files:
+- programs/streamingDeviceController/StreamingDevice.hpp
+- programs/streamingDeviceController/StreamingDevice.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::StreamingDeviceController, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Sends streaming commands to the cartesian controller from a streaming input device like the 3Dconnexion Space Navigator.
+ More...
+
+
#include <StreamingDeviceController.hpp>
+
+
+
+

+
+
+ |
+|
+bool | configure (yarp::os::ResourceFinder &rf) override |
+| |
+|
+bool | updateModule () override |
+| |
+|
+bool | interruptModule () override |
+| |
+|
+bool | close () override |
+| |
+|
+double | getPeriod () override |
+| |
+|
+void | onRead (yarp::os::Bottle &bot) override |
+| |
+
+ |
+|
+bool | update (double timestamp) |
+| |
+
+ |
+|
+StreamingDevice * | streamingDevice |
+| |
+|
+yarp::dev::PolyDriver | cartesianControlClientDevice |
+| |
+|
+roboticslab::ICartesianControl * | iCartesianControl |
+| |
+|
+yarp::os::BufferedPort< yarp::os::Bottle > | proximityPort |
+| |
+|
+int | thresholdAlertHigh |
+| |
+|
+int | thresholdAlertLow |
+| |
+|
+bool | disableSensorsLowLevel |
+| |
+|
+yarp::os::BufferedPort< yarp::os::Bottle > | centroidPort |
+| |
+|
+CentroidTransform | centroidTransform |
+| |
+|
+yarp::os::BufferedPort< yarp::os::Bottle > | syncPort |
+| |
+|
+double | period |
+| |
+|
+double | scaling |
+| |
+|
+bool | isStopped |
+| |
+
+
+
The documentation for this class was generated from the following files:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::StreamingDeviceFactory, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Factory class for creating instances of StreamingDevice.
+
+
+
#include <StreamingDevice.hpp>
+
+
+
+
◆ makeDevice()
+
+
+
+
+
+
+
+
+ | StreamingDevice * StreamingDeviceFactory::makeDevice |
+ ( |
+ const std::string & |
+ deviceName, |
+
+
+ |
+ |
+ yarp::os::Searchable & |
+ config |
+
+
+ |
+ ) |
+ | |
+
+
+ |
+
+static |
+
+
+
+
- Parameters
-
+
+ | deviceName | Name of the device. |
+ | config | List of options the YARP device should be opened with. |
+
+
+
+
- Returns
- Pointer to an instance of a StreamingDevice.
+
+
+
+
The documentation for this class was generated from the following files:
+- programs/streamingDeviceController/StreamingDevice.hpp
+- programs/streamingDeviceController/StreamingDevice.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::WiimoteSensorDevice, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Represents a Wiimote device wrapped as an analog sensor by YARP.
+
+
+
#include <WiimoteSensorDevice.hpp>
+
+
+
+

+
+
+
+ |
+| enum | cmd_mode { NONE
+, FWD
+, BKWD
+, ROT
+ } |
+| |
+
+ |
+|
+yarp::dev::IAnalogSensor * | iAnalogSensor |
+| |
+|
+cmd_mode | mode |
+| |
+|
+std::vector< double > | buffer |
+| |
+|
+bool | usingPose |
+| |
+|
+double | step |
+| |
+
+ |
+
+|
+ICartesianControl * | iCartesianControl |
+| |
+|
+std::vector< double > | data |
+| |
+|
+std::vector< bool > | fixedAxes |
+| |
+|
+int | actuatorState |
+| |
+
+
+
+
◆ acquireData()
+
+
+
+
+
+
+
+
+ | bool WiimoteSensorDevice::acquireData |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ acquireInterfaces()
+
+
+
+
+
+
+
+
+ | bool WiimoteSensorDevice::acquireInterfaces |
+ ( |
+ | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ hasValidMovementData()
+
+
+
+
+
+
+
+
+ | bool WiimoteSensorDevice::hasValidMovementData |
+ ( |
+ | ) |
+ const |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ initialize()
+
+
+
+
+
+
+
+
+ | bool WiimoteSensorDevice::initialize |
+ ( |
+ bool |
+ usingStreamingPreset | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | usingStreamingPreset | Whether the cartesian controller supports streaming command presets or not. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Reimplemented from roboticslab::StreamingDevice.
+
+
+
+
+
◆ sendMovementCommand()
+
+
+
+
+
+
+
+
+ | void WiimoteSensorDevice::sendMovementCommand |
+ ( |
+ double |
+ timestamp | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
+
+
◆ transformData()
+
+
+
+
+
+
+
+
+ | bool WiimoteSensorDevice::transformData |
+ ( |
+ double |
+ scaling | ) |
+ |
+
+
+ |
+
+overridevirtual |
+
+
+
+
- Parameters
-
+
+ | scaling | Scaling factor applied to each data value. |
+
+
+
+
- Returns
- true on success, false otherwise
+
+
Reimplemented from roboticslab::StreamingDevice.
+
+
+
+
The documentation for this class was generated from the following files:
+- programs/streamingDeviceController/WiimoteSensorDevice.hpp
+- programs/streamingDeviceController/WiimoteSensorDevice.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::test::AsibotSolverTestFromFile, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Tests AsibotSolver ikin from loaded configuration file.
+
+
+
+
+

+
+
+ |
+|
+void | SetUp () override |
+| |
+|
+void | TearDown () override |
+| |
+
+ |
+|
+static const double | EPS_CART = 1e-6 |
+| |
+|
+static const double | EPS_JOINT = 1e-3 |
+| |
+
+
The documentation for this class was generated from the following file:
+- tests/testAsibotSolverFromFile.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::test::BasicCartesianControlTest, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Tests BasicCartesianControl ikin and idyn on a simple mechanism.
+
+
+
+
+

+
+
+ |
+|
+void | SetUp () override |
+| |
+|
+void | TearDown () override |
+| |
+
+
The documentation for this class was generated from the following file:
+- tests/testBasicCartesianControl.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::test::KdlSolverTest, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Tests KdlSolver ikin and idyn on a simple mechanism.
+
+
+
+
+

+
+
+ |
+|
+void | SetUp () override |
+| |
+|
+void | TearDown () override |
+| |
+
+ |
+|
+static constexpr double | eps = 1e-9 |
+| |
+
+
The documentation for this class was generated from the following file:
+- tests/testKdlSolver.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::test::KdlSolverTestFromFile, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Tests KdlSolver ikin and idyn on a simple mechanism.
+
+
+
+
+

+
+
+ |
+|
+void | SetUp () override |
+| |
+|
+void | TearDown () override |
+| |
+
+
The documentation for this class was generated from the following file:
+- tests/testKdlSolverFromFile.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::test::KinRepresentationTest, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Tests KinRepresentation.
+
+
+
+
+

+
+
+ |
+|
+void | SetUp () override |
+| |
+|
+void | TearDown () override |
+| |
+
+ |
+|
+static const double | EPS = 1e-9 |
+| |
+
+
The documentation for this class was generated from the following file:
+- tests/testKinRepresentation.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::test::ScrewTheoryTest, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Tests classes related to Screw Theory.
+
+
+
+
+

+
+
+ |
+|
+void | SetUp () override |
+| |
+|
+void | TearDown () override |
+| |
+
+ |
+|
+static KDL::JntArray | fillJointValues (int size, double value) |
+| |
+|
+static KDL::Chain | makeTeoRightArmKinematicsFromDH () |
+| |
+|
+static PoeExpression | makeTeoRightArmKinematicsFromPoE () |
+| |
+|
+static KDL::Chain | makeTeoRightLegKinematicsFromDH () |
+| |
+|
+static PoeExpression | makeTeoRightLegKinematicsFromPoE () |
+| |
+|
+static KDL::Chain | makeAbbIrb120KinematicsFromDH () |
+| |
+|
+static PoeExpression | makeAbbIrb120KinematicsFromPoE () |
+| |
+|
+static KDL::Chain | makePumaKinematicsFromDH () |
+| |
+|
+static PoeExpression | makePumaKinematicsFromPoE () |
+| |
+|
+static KDL::Chain | makeStanfordKinematicsFromDH () |
+| |
+|
+static PoeExpression | makeStanfordKinematicsFromPoE () |
+| |
+|
+static KDL::Chain | makeAbbIrb910scKinematicsFromDH () |
+| |
+|
+static PoeExpression | makeAbbIrb910scKinematicsFromPoE () |
+| |
+|
+static KDL::Chain | makeAbbIrb6620lxFromDh () |
+| |
+|
+static PoeExpression | makeAbbIrb6620lxFromPoE () |
+| |
+|
+static void | checkSolutions (const ScrewTheoryIkSubproblem::Solutions &actual, const ScrewTheoryIkSubproblem::Solutions &expected) |
+| |
+|
+static void | checkRobotKinematics (const KDL::Chain &chain, const PoeExpression &poe, int soln) |
+| |
+|
+static int | findTargetConfiguration (const ScrewTheoryIkProblem::Solutions &solutions, const KDL::JntArray &target) |
+| |
+
+
The documentation for this class was generated from the following file:
+- tests/testScrewTheory.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_15768b185b6e8b816adf0c89b30bfe65.html b/dir_15768b185b6e8b816adf0c89b30bfe65.html
new file mode 100644
index 000000000..a83e193ef
--- /dev/null
+++ b/dir_15768b185b6e8b816adf0c89b30bfe65.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: programs/streamingDeviceController Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_17d4fdefd982442a79427fe9d98568ae.html b/dir_17d4fdefd982442a79427fe9d98568ae.html
new file mode 100644
index 000000000..94c1449ec
--- /dev/null
+++ b/dir_17d4fdefd982442a79427fe9d98568ae.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: libraries/YarpPlugins/AsibotSolver Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_1d6bf2fb1d016ec6b197455d198424da.html b/dir_1d6bf2fb1d016ec6b197455d198424da.html
new file mode 100644
index 000000000..76bdcf320
--- /dev/null
+++ b/dir_1d6bf2fb1d016ec6b197455d198424da.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: libraries/YarpPlugins/CartesianControlServer Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_25c7435138c3ee6ac4c9babe8db7ecf9.html b/dir_25c7435138c3ee6ac4c9babe8db7ecf9.html
new file mode 100644
index 000000000..f13921719
--- /dev/null
+++ b/dir_25c7435138c3ee6ac4c9babe8db7ecf9.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: programs/ftCompensation Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_387a94d47062d4e808cee3de63065fcd.html b/dir_387a94d47062d4e808cee3de63065fcd.html
new file mode 100644
index 000000000..95c0b4a06
--- /dev/null
+++ b/dir_387a94d47062d4e808cee3de63065fcd.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: programs/haarDetectionController Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_487dfb5d6e3e441bbdba0aef32150596.html b/dir_487dfb5d6e3e441bbdba0aef32150596.html
new file mode 100644
index 000000000..5595bbe32
--- /dev/null
+++ b/dir_487dfb5d6e3e441bbdba0aef32150596.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: libraries/YarpPlugins/KdlTreeSolver Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_49e6bd22918cee17ddc14df5c827b459.html b/dir_49e6bd22918cee17ddc14df5c827b459.html
new file mode 100644
index 000000000..c3d09249a
--- /dev/null
+++ b/dir_49e6bd22918cee17ddc14df5c827b459.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: libraries/KinematicRepresentationLib Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_4e03118d576dd8e71b5dbe7081ce822d.html b/dir_4e03118d576dd8e71b5dbe7081ce822d.html
new file mode 100644
index 000000000..947897201
--- /dev/null
+++ b/dir_4e03118d576dd8e71b5dbe7081ce822d.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: programs/keyboardController Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_4f22d2c14b4bbce8870d40d37a8ebee2.html b/dir_4f22d2c14b4bbce8870d40d37a8ebee2.html
new file mode 100644
index 000000000..20635eb03
--- /dev/null
+++ b/dir_4f22d2c14b4bbce8870d40d37a8ebee2.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: libraries/YarpPlugins/CartesianControlClient Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_51393f38608496e2be890df69ecb13f1.html b/dir_51393f38608496e2be890df69ecb13f1.html
new file mode 100644
index 000000000..13d8e2bcc
--- /dev/null
+++ b/dir_51393f38608496e2be890df69ecb13f1.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: examples/cpp/exampleCartesianControlClient Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_59425e443f801f1f2fd8bbe4959a3ccf.html b/dir_59425e443f801f1f2fd8bbe4959a3ccf.html
new file mode 100644
index 000000000..e91bcc889
--- /dev/null
+++ b/dir_59425e443f801f1f2fd8bbe4959a3ccf.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: tests Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_75b15c0a6e736aa4482428563186dcc3.html b/dir_75b15c0a6e736aa4482428563186dcc3.html
new file mode 100644
index 000000000..59cf97cb2
--- /dev/null
+++ b/dir_75b15c0a6e736aa4482428563186dcc3.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: libraries/YarpPlugins/BasicCartesianControl Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_7b0a5d1507c7f681cbfa1deb5990c6ea.html b/dir_7b0a5d1507c7f681cbfa1deb5990c6ea.html
new file mode 100644
index 000000000..85b6a73ac
--- /dev/null
+++ b/dir_7b0a5d1507c7f681cbfa1deb5990c6ea.html
@@ -0,0 +1,89 @@
+
+
+
+
+
+
+
+kinematics-dynamics: programs Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_af0bcd1d9c8bf0be37b473fa7c916aed.html b/dir_af0bcd1d9c8bf0be37b473fa7c916aed.html
new file mode 100644
index 000000000..c45a4791a
--- /dev/null
+++ b/dir_af0bcd1d9c8bf0be37b473fa7c916aed.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: examples/cpp/exampleScrewTheoryTrajectory Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_bbdaf73c7839257653cfce0d61f80663.html b/dir_bbdaf73c7839257653cfce0d61f80663.html
new file mode 100644
index 000000000..8a20f1b49
--- /dev/null
+++ b/dir_bbdaf73c7839257653cfce0d61f80663.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: libraries/YarpTinyMathLib Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_bc0718b08fb2015b8e59c47b2805f60c.html b/dir_bc0718b08fb2015b8e59c47b2805f60c.html
new file mode 100644
index 000000000..c31367233
--- /dev/null
+++ b/dir_bc0718b08fb2015b8e59c47b2805f60c.html
@@ -0,0 +1,89 @@
+
+
+
+
+
+
+
+kinematics-dynamics: libraries Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_d050070cc3e4bbd91d897ff8856046e0.html b/dir_d050070cc3e4bbd91d897ff8856046e0.html
new file mode 100644
index 000000000..7d2bd3ad4
--- /dev/null
+++ b/dir_d050070cc3e4bbd91d897ff8856046e0.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: examples/python Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_d28a4824dc47e487b107a5db32ef43c4.html b/dir_d28a4824dc47e487b107a5db32ef43c4.html
new file mode 100644
index 000000000..7bf34fe4b
--- /dev/null
+++ b/dir_d28a4824dc47e487b107a5db32ef43c4.html
@@ -0,0 +1,91 @@
+
+
+
+
+
+
+
+kinematics-dynamics: examples Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_e68e8157741866f444e17edd764ebbae.html b/dir_e68e8157741866f444e17edd764ebbae.html
new file mode 100644
index 000000000..607972701
--- /dev/null
+++ b/dir_e68e8157741866f444e17edd764ebbae.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: doc Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_f528a5afad561ac522bac3a41785be2e.html b/dir_f528a5afad561ac522bac3a41785be2e.html
new file mode 100644
index 000000000..98de5bb84
--- /dev/null
+++ b/dir_f528a5afad561ac522bac3a41785be2e.html
@@ -0,0 +1,85 @@
+
+
+
+
+
+
+
+kinematics-dynamics: libraries/KdlVectorConverterLib Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/dir_f98f57c538677273d6e3d52c55355c28.html b/dir_f98f57c538677273d6e3d52c55355c28.html
new file mode 100644
index 000000000..68cae4687
--- /dev/null
+++ b/dir_f98f57c538677273d6e3d52c55355c28.html
@@ -0,0 +1,98 @@
+
+
+
+
+
+
+
+kinematics-dynamics: libraries/YarpPlugins Directory Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented files with brief descriptions:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- a -
+- acceptBottle()
+: roboticslab::CentroidTransform
+
+- acquireData()
+: roboticslab::InvalidDevice
+, roboticslab::LeapMotionSensorDevice
+, roboticslab::SpnavSensorDevice
+, roboticslab::StreamingDevice
+, roboticslab::WiimoteSensorDevice
+
+- acquireInterfaces()
+: roboticslab::InvalidDevice
+, roboticslab::LeapMotionSensorDevice
+, roboticslab::SpnavSensorDevice
+, roboticslab::StreamingDevice
+, roboticslab::WiimoteSensorDevice
+
+- act()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- append()
+: roboticslab::PoeExpression
+
+- appendLink()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- applyConstraints()
+: roboticslab::ConfigurationSelectorHumanoidGait
+
+- asFrame()
+: roboticslab::MatrixExponential
+
+- AsibotConfiguration()
+: roboticslab::AsibotConfiguration
+
+- AsibotConfigurationFactory()
+: roboticslab::AsibotConfigurationFactory
+
+- AsibotConfigurationLeastOverallAngularDisplacement()
+: roboticslab::AsibotConfigurationLeastOverallAngularDisplacement
+
+- AsibotConfigurationLeastOverallAngularDisplacementFactory()
+: roboticslab::AsibotConfigurationLeastOverallAngularDisplacementFactory
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- b -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- c -
+- CartToJnt()
+: roboticslab::ChainIkSolverPos_ID
+, roboticslab::ChainIkSolverPos_ST
+
+- CentroidTransform()
+: roboticslab::CentroidTransform
+
+- chain
+: roboticslab::KdlSolver
+
+- ChainIkSolverPos_ID()
+: roboticslab::ChainIkSolverPos_ID
+
+- changeBase()
+: roboticslab::MatrixExponential
+
+- changeBaseFrame()
+: roboticslab::PoeExpression
+
+- changeOrigin()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- changeToolFrame()
+: roboticslab::PoeExpression
+
+- checkJointsInLimits()
+: roboticslab::AsibotConfiguration::Pose
+
+- cloneWithBase()
+: roboticslab::MatrixExponential
+
+- Configuration()
+: roboticslab::ConfigurationSelector::Configuration
+
+- ConfigurationSelector()
+: roboticslab::ConfigurationSelector
+
+- ConfigurationSelectorFactory()
+: roboticslab::ConfigurationSelectorFactory
+
+- ConfigurationSelectorHumanoidGait()
+: roboticslab::ConfigurationSelectorHumanoidGait
+
+- ConfigurationSelectorHumanoidGaitFactory()
+: roboticslab::ConfigurationSelectorHumanoidGaitFactory
+
+- ConfigurationSelectorLeastOverallAngularDisplacement()
+: roboticslab::ConfigurationSelectorLeastOverallAngularDisplacement
+
+- ConfigurationSelectorLeastOverallAngularDisplacementFactory()
+: roboticslab::ConfigurationSelectorLeastOverallAngularDisplacementFactory
+
+- configure()
+: OrderThreeTraj
+, roboticslab::AsibotConfiguration
+, roboticslab::ConfigurationSelector
+
+- configureFixedAxes()
+: roboticslab::StreamingDevice
+
+- create()
+: roboticslab::AsibotConfigurationFactory
+, roboticslab::AsibotConfigurationLeastOverallAngularDisplacementFactory
+, roboticslab::ChainFkSolverPos_ST
+, roboticslab::ChainIkSolverPos_ST
+, roboticslab::ConfigurationSelectorFactory
+, roboticslab::ConfigurationSelectorHumanoidGaitFactory
+, roboticslab::ConfigurationSelectorLeastOverallAngularDisplacementFactory
+, roboticslab::ScrewTheoryIkProblem
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- d -
+- describe()
+: roboticslab::PadenKahanOne
+, roboticslab::PadenKahanThree
+, roboticslab::PadenKahanTwo
+, roboticslab::PardosGotorFour
+, roboticslab::PardosGotorOne
+, roboticslab::PardosGotorThree
+, roboticslab::PardosGotorTwo
+, roboticslab::ScrewTheoryIkSubproblem
+
+- diffInvKin()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- dump()
+: OrderThreeTraj
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- e -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_eval.html b/functions_eval.html
new file mode 100644
index 000000000..aab28933b
--- /dev/null
+++ b/functions_eval.html
@@ -0,0 +1,91 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Enumerator
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_f.html b/functions_f.html
new file mode 100644
index 000000000..05ab7fd19
--- /dev/null
+++ b/functions_f.html
@@ -0,0 +1,105 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- f -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
- a -
+- acceptBottle()
+: roboticslab::CentroidTransform
+
+- acquireData()
+: roboticslab::InvalidDevice
+, roboticslab::LeapMotionSensorDevice
+, roboticslab::SpnavSensorDevice
+, roboticslab::StreamingDevice
+, roboticslab::WiimoteSensorDevice
+
+- acquireInterfaces()
+: roboticslab::InvalidDevice
+, roboticslab::LeapMotionSensorDevice
+, roboticslab::SpnavSensorDevice
+, roboticslab::StreamingDevice
+, roboticslab::WiimoteSensorDevice
+
+- act()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- append()
+: roboticslab::PoeExpression
+
+- appendLink()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- applyConstraints()
+: roboticslab::ConfigurationSelectorHumanoidGait
+
+- asFrame()
+: roboticslab::MatrixExponential
+
+- AsibotConfiguration()
+: roboticslab::AsibotConfiguration
+
+- AsibotConfigurationFactory()
+: roboticslab::AsibotConfigurationFactory
+
+- AsibotConfigurationLeastOverallAngularDisplacement()
+: roboticslab::AsibotConfigurationLeastOverallAngularDisplacement
+
+- AsibotConfigurationLeastOverallAngularDisplacementFactory()
+: roboticslab::AsibotConfigurationLeastOverallAngularDisplacementFactory
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_c.html b/functions_func_c.html
new file mode 100644
index 000000000..10b9a13db
--- /dev/null
+++ b/functions_func_c.html
@@ -0,0 +1,151 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
- c -
+- CartToJnt()
+: roboticslab::ChainIkSolverPos_ID
+, roboticslab::ChainIkSolverPos_ST
+
+- CentroidTransform()
+: roboticslab::CentroidTransform
+
+- ChainIkSolverPos_ID()
+: roboticslab::ChainIkSolverPos_ID
+
+- changeBase()
+: roboticslab::MatrixExponential
+
+- changeBaseFrame()
+: roboticslab::PoeExpression
+
+- changeOrigin()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- changeToolFrame()
+: roboticslab::PoeExpression
+
+- checkJointsInLimits()
+: roboticslab::AsibotConfiguration::Pose
+
+- cloneWithBase()
+: roboticslab::MatrixExponential
+
+- Configuration()
+: roboticslab::ConfigurationSelector::Configuration
+
+- ConfigurationSelector()
+: roboticslab::ConfigurationSelector
+
+- ConfigurationSelectorFactory()
+: roboticslab::ConfigurationSelectorFactory
+
+- ConfigurationSelectorHumanoidGait()
+: roboticslab::ConfigurationSelectorHumanoidGait
+
+- ConfigurationSelectorHumanoidGaitFactory()
+: roboticslab::ConfigurationSelectorHumanoidGaitFactory
+
+- ConfigurationSelectorLeastOverallAngularDisplacement()
+: roboticslab::ConfigurationSelectorLeastOverallAngularDisplacement
+
+- ConfigurationSelectorLeastOverallAngularDisplacementFactory()
+: roboticslab::ConfigurationSelectorLeastOverallAngularDisplacementFactory
+
+- configure()
+: OrderThreeTraj
+, roboticslab::AsibotConfiguration
+, roboticslab::ConfigurationSelector
+
+- configureFixedAxes()
+: roboticslab::StreamingDevice
+
+- create()
+: roboticslab::AsibotConfigurationFactory
+, roboticslab::AsibotConfigurationLeastOverallAngularDisplacementFactory
+, roboticslab::ChainFkSolverPos_ST
+, roboticslab::ChainIkSolverPos_ST
+, roboticslab::ConfigurationSelectorFactory
+, roboticslab::ConfigurationSelectorHumanoidGaitFactory
+, roboticslab::ConfigurationSelectorLeastOverallAngularDisplacementFactory
+, roboticslab::ScrewTheoryIkProblem
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
- d -
+- describe()
+: roboticslab::PadenKahanOne
+, roboticslab::PadenKahanThree
+, roboticslab::PadenKahanTwo
+, roboticslab::PardosGotorFour
+, roboticslab::PardosGotorOne
+, roboticslab::PardosGotorThree
+, roboticslab::PardosGotorTwo
+, roboticslab::ScrewTheoryIkSubproblem
+
+- diffInvKin()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- dump()
+: OrderThreeTraj
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_f.html b/functions_func_f.html
new file mode 100644
index 000000000..266aacd2a
--- /dev/null
+++ b/functions_func_f.html
@@ -0,0 +1,102 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_g.html b/functions_func_g.html
new file mode 100644
index 000000000..a71121531
--- /dev/null
+++ b/functions_func_g.html
@@ -0,0 +1,144 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
- g -
+- gcmp()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- get()
+: OrderThreeTraj
+
+- getActuatorState()
+: roboticslab::LeapMotionSensorDevice
+, roboticslab::SpnavSensorDevice
+, roboticslab::StreamingDevice
+
+- getAxis()
+: roboticslab::MatrixExponential
+
+- getDiffs()
+: roboticslab::AsibotConfigurationLeastOverallAngularDisplacement
+, roboticslab::ConfigurationSelectorLeastOverallAngularDisplacement
+
+- getdot()
+: OrderThreeTraj
+
+- getdotdot()
+: OrderThreeTraj
+
+- getMotionType()
+: roboticslab::MatrixExponential
+
+- getNumJoints()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- getNumTcps()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- getOrigin()
+: roboticslab::MatrixExponential
+
+- getParameter()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- getParameters()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- getSteps()
+: roboticslab::ScrewTheoryIkProblem
+
+- getT()
+: OrderThreeTraj
+
+- getTransform()
+: roboticslab::PoeExpression
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_i.html b/functions_func_i.html
new file mode 100644
index 000000000..10aa010ca
--- /dev/null
+++ b/functions_func_i.html
@@ -0,0 +1,116 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
- i -
+- initialize()
+: roboticslab::LeapMotionSensorDevice
+, roboticslab::SpnavSensorDevice
+, roboticslab::StreamingDevice
+, roboticslab::WiimoteSensorDevice
+
+- inv()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- invalidate()
+: roboticslab::ConfigurationSelector::Configuration
+
+- InvalidDevice()
+: roboticslab::InvalidDevice
+
+- invDyn()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- invKin()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- isReversed()
+: roboticslab::ScrewTheoryIkProblem
+
+- isValid()
+: roboticslab::ConfigurationSelector::Configuration
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_l.html b/functions_func_l.html
new file mode 100644
index 000000000..0c0c34097
--- /dev/null
+++ b/functions_func_l.html
@@ -0,0 +1,84 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_m.html b/functions_func_m.html
new file mode 100644
index 000000000..4a665fb9e
--- /dev/null
+++ b/functions_func_m.html
@@ -0,0 +1,114 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_p.html b/functions_func_p.html
new file mode 100644
index 000000000..081058a57
--- /dev/null
+++ b/functions_func_p.html
@@ -0,0 +1,122 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_r.html b/functions_func_r.html
new file mode 100644
index 000000000..4365151b6
--- /dev/null
+++ b/functions_func_r.html
@@ -0,0 +1,109 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_s.html b/functions_func_s.html
new file mode 100644
index 000000000..a2e2bba53
--- /dev/null
+++ b/functions_func_s.html
@@ -0,0 +1,169 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
- s -
+- ScrewTheoryIkProblemBuilder()
+: roboticslab::ScrewTheoryIkProblemBuilder
+
+- sendMovementCommand()
+: roboticslab::InvalidDevice
+, roboticslab::LeapMotionSensorDevice
+, roboticslab::SpnavSensorDevice
+, roboticslab::StreamingDevice
+, roboticslab::WiimoteSensorDevice
+
+- setCartesianControllerHandle()
+: roboticslab::StreamingDevice
+
+- setParameter()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- setParameters()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- setPermanenceTime()
+: roboticslab::CentroidTransform
+
+- setTcpToCameraRotation()
+: roboticslab::CentroidTransform
+
+- size()
+: roboticslab::PoeExpression
+
+- solutions()
+: roboticslab::PadenKahanOne
+, roboticslab::PadenKahanThree
+, roboticslab::PadenKahanTwo
+, roboticslab::PardosGotorFour
+, roboticslab::PardosGotorOne
+, roboticslab::PardosGotorThree
+, roboticslab::PardosGotorTwo
+, roboticslab::ScrewTheoryIkProblem
+, roboticslab::ScrewTheoryIkSubproblem
+
+- solve()
+: roboticslab::PadenKahanOne
+, roboticslab::PadenKahanThree
+, roboticslab::PadenKahanTwo
+, roboticslab::PardosGotorFour
+, roboticslab::PardosGotorOne
+, roboticslab::PardosGotorThree
+, roboticslab::PardosGotorTwo
+, roboticslab::ScrewTheoryIkProblem
+, roboticslab::ScrewTheoryIkSubproblem
+
+- SpnavSensorDevice()
+: roboticslab::SpnavSensorDevice
+
+- stat()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- stopControl()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- stopMotion()
+: roboticslab::InvalidDevice
+, roboticslab::LeapMotionSensorDevice
+, roboticslab::SpnavSensorDevice
+, roboticslab::StreamingDevice
+, roboticslab::WiimoteSensorDevice
+
+- store()
+: roboticslab::ConfigurationSelector::Configuration
+
+- storeAngles()
+: roboticslab::AsibotConfiguration::Pose
+
+- StreamingDevice()
+: roboticslab::StreamingDevice
+
+- strError()
+: roboticslab::ChainFkSolverPos_ST
+, roboticslab::ChainIkSolverPos_ID
+, roboticslab::ChainIkSolverPos_ST
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_u.html b/functions_func_u.html
new file mode 100644
index 000000000..01b6db48a
--- /dev/null
+++ b/functions_func_u.html
@@ -0,0 +1,86 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_v.html b/functions_func_v.html
new file mode 100644
index 000000000..67550b55e
--- /dev/null
+++ b/functions_func_v.html
@@ -0,0 +1,84 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_w.html b/functions_func_w.html
new file mode 100644
index 000000000..dfd08f246
--- /dev/null
+++ b/functions_func_w.html
@@ -0,0 +1,94 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_func_~.html b/functions_func_~.html
new file mode 100644
index 000000000..674314ea1
--- /dev/null
+++ b/functions_func_~.html
@@ -0,0 +1,105 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members - Functions
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_g.html b/functions_g.html
new file mode 100644
index 000000000..2e7b4bafc
--- /dev/null
+++ b/functions_g.html
@@ -0,0 +1,144 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- g -
+- gcmp()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- get()
+: OrderThreeTraj
+
+- getActuatorState()
+: roboticslab::LeapMotionSensorDevice
+, roboticslab::SpnavSensorDevice
+, roboticslab::StreamingDevice
+
+- getAxis()
+: roboticslab::MatrixExponential
+
+- getDiffs()
+: roboticslab::AsibotConfigurationLeastOverallAngularDisplacement
+, roboticslab::ConfigurationSelectorLeastOverallAngularDisplacement
+
+- getdot()
+: OrderThreeTraj
+
+- getdotdot()
+: OrderThreeTraj
+
+- getMotionType()
+: roboticslab::MatrixExponential
+
+- getNumJoints()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- getNumTcps()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- getOrigin()
+: roboticslab::MatrixExponential
+
+- getParameter()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- getParameters()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- getSteps()
+: roboticslab::ScrewTheoryIkProblem
+
+- getT()
+: OrderThreeTraj
+
+- getTransform()
+: roboticslab::PoeExpression
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- h -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- i -
+- initialize()
+: roboticslab::LeapMotionSensorDevice
+, roboticslab::SpnavSensorDevice
+, roboticslab::StreamingDevice
+, roboticslab::WiimoteSensorDevice
+
+- inv()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- invalidate()
+: roboticslab::ConfigurationSelector::Configuration
+
+- InvalidDevice()
+: roboticslab::InvalidDevice
+
+- invDyn()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- invKin()
+: roboticslab::AsibotSolver
+, roboticslab::ICartesianSolver
+, roboticslab::KdlSolver
+, roboticslab::KdlTreeSolver
+
+- isReversed()
+: roboticslab::ScrewTheoryIkProblem
+
+- isValid()
+: roboticslab::ConfigurationSelector::Configuration
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- j -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- l -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- m -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- o -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- p -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- r -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- s -
+- ScrewTheoryIkProblemBuilder()
+: roboticslab::ScrewTheoryIkProblemBuilder
+
+- sendMovementCommand()
+: roboticslab::InvalidDevice
+, roboticslab::LeapMotionSensorDevice
+, roboticslab::SpnavSensorDevice
+, roboticslab::StreamingDevice
+, roboticslab::WiimoteSensorDevice
+
+- setCartesianControllerHandle()
+: roboticslab::StreamingDevice
+
+- setParameter()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- setParameters()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- setPermanenceTime()
+: roboticslab::CentroidTransform
+
+- setTcpToCameraRotation()
+: roboticslab::CentroidTransform
+
+- size()
+: roboticslab::PoeExpression
+
+- solutions()
+: roboticslab::PadenKahanOne
+, roboticslab::PadenKahanThree
+, roboticslab::PadenKahanTwo
+, roboticslab::PardosGotorFour
+, roboticslab::PardosGotorOne
+, roboticslab::PardosGotorThree
+, roboticslab::PardosGotorTwo
+, roboticslab::ScrewTheoryIkProblem
+
+- Solutions
+: roboticslab::ScrewTheoryIkProblem
+, roboticslab::ScrewTheoryIkSubproblem
+
+- solutions()
+: roboticslab::ScrewTheoryIkSubproblem
+
+- solve()
+: roboticslab::PadenKahanOne
+, roboticslab::PadenKahanThree
+, roboticslab::PadenKahanTwo
+, roboticslab::PardosGotorFour
+, roboticslab::PardosGotorOne
+, roboticslab::PardosGotorThree
+, roboticslab::PardosGotorTwo
+, roboticslab::ScrewTheoryIkProblem
+, roboticslab::ScrewTheoryIkSubproblem
+
+- SpnavSensorDevice()
+: roboticslab::SpnavSensorDevice
+
+- stat()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- Steps
+: roboticslab::ScrewTheoryIkProblem
+
+- stopControl()
+: roboticslab::BasicCartesianControl
+, roboticslab::CartesianControlClient
+, roboticslab::ICartesianControl
+
+- stopMotion()
+: roboticslab::InvalidDevice
+, roboticslab::LeapMotionSensorDevice
+, roboticslab::SpnavSensorDevice
+, roboticslab::StreamingDevice
+, roboticslab::WiimoteSensorDevice
+
+- store()
+: roboticslab::ConfigurationSelector::Configuration
+
+- storeAngles()
+: roboticslab::AsibotConfiguration::Pose
+
+- StreamingDevice()
+: roboticslab::StreamingDevice
+
+- strError()
+: roboticslab::ChainFkSolverPos_ST
+, roboticslab::ChainIkSolverPos_ID
+, roboticslab::ChainIkSolverPos_ST
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- t -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_u.html b/functions_u.html
new file mode 100644
index 000000000..e042edb5e
--- /dev/null
+++ b/functions_u.html
@@ -0,0 +1,86 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- u -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- v -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/functions_w.html b/functions_w.html
new file mode 100644
index 000000000..1aae91d7f
--- /dev/null
+++ b/functions_w.html
@@ -0,0 +1,94 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Members
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- w -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented class members with links to the class documentation for each member:
+
+
- ~ -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented file members with links to the documentation:
+
+
- v -
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/group__AsibotSolver.html b/group__AsibotSolver.html
new file mode 100644
index 000000000..86119cc88
--- /dev/null
+++ b/group__AsibotSolver.html
@@ -0,0 +1,106 @@
+
+
+
+
+
+
+
+kinematics-dynamics: AsibotSolver
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/group__BasicCartesianControl.html b/group__BasicCartesianControl.html
new file mode 100644
index 000000000..f3b854b32
--- /dev/null
+++ b/group__BasicCartesianControl.html
@@ -0,0 +1,122 @@
+
+
+
+
+
+
+
+kinematics-dynamics: BasicCartesianControl
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Contains roboticslab::BasicCartesianControl.
+More...
+
+
+
+Example with a Fake robot
+
First we must run a YARP name server if it is not running in our current namespace:
+
[on terminal 1] yarp server
+
And then launch the actual library:
+
[on terminal 2] yarpdev --device BasicCartesianControl --robot EmulatedControlBoard --angleRepr axisAngle --link_0 "(A 1)"
+
Along the output, observe a line like the following.
[info] DeviceDriverImpl.cpp:26 open(): Using angleRepr: axisAngle.
+
This would mean we are using an axis/angle notation (par de rotación). Note that it is a variable parameter; in fact, we have forced it above.
+
We connect, can ask for help, etc. Here's an example interaction:
[on terminal 3] yarp rpc /CartesianControl/rpc_transform:s
+[>>] help
+Response: [stat] [inv] [movj] [movl] [movv] [gcmp] [forc] [stop]
+[>>] stat
+Response: [ccnc] 1.0 0.0 0.0 0.0 0.0 1.0 0.0
+
Stat returns the controller status, and forward kinematics. [ccnc] means Cartesian Control Not Controlling (also note that notation is in constant evolution, so put an issue if it's not updated!). The first 3 parameters of the forward kinnematics are X,Y,Z of the end-effector. The other parameters correspond to orientation in the previously set notation, which in this example is axis/angle, so this would read: on Z, 0 degrees.
+
Let's now move to a reachable position/orientation.
[>>] movj 1.0 0.0 0.0 0.0 0.0 1.0 0.0
+Response: [ok]
+
+Example with teoSim
+
What moslty changes is the library command line invocation. We also change the server port name. The following is an example for the simulated robot's right arm.
[on terminal 2] yarpdev --device BasicCartesianControl --name /teoSim/rightArm/CartesianControl --from /usr/local/share/teo-configuration-files/contexts/kinematics/rightArmKinematics.ini --angleRepr axisAngle --robot remote_controlboard --local /BasicCartesianControl/teoSim/rightArm --remote /teoSim/rightArm
+[on terminal 3] yarp rpc /teoSim/rightArm/CartesianControl/rpc_transform:s
+
+Example with real TEO
+
What moslty changes is the library command line invocation. We also change the server port name. The following is an example for the robot's right arm.
[on terminal 2] yarpdev --device BasicCartesianControl --name /teo/rightArm/CartesianControl --from /usr/local/share/teo-configuration-files/contexts/kinematics/rightArmKinematics.ini --angleRepr axisAngle --robot remote_controlboard --local /BasicCartesianControl/teo/rightArm --remote /teo/rightArm
+[on terminal 3] yarp rpc /teo/rightArm/CartesianControl/rpc:s
+
On the real robot, you can even activate Gravity Compensation (warning: dangerous if kinematic/dynamic model has not been reviewed!).
[>>] gcmp
+
+Very Important
+
When you launch the BasicCartesianControl device as in [terminal 2], it's actually wrapped: CartesianControlServer is the device that is actually loaded, and BasicCartesianControl becomes its subdevice. The server is what allows us to interact via the YARP RPC port mechanism. If you are creating a C++ program, you do not have to sned these raw port commands. Use CartesianControlClient instead, because the server and client are YARP devices (further reading on why this is good: here (spanish)).
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/group__CartesianControlServer.html b/group__CartesianControlServer.html
new file mode 100644
index 000000000..2101d8fd0
--- /dev/null
+++ b/group__CartesianControlServer.html
@@ -0,0 +1,103 @@
+
+
+
+
+
+
+
+kinematics-dynamics: CartesianControlServer
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/group__KdlSolver.html b/group__KdlSolver.html
new file mode 100644
index 000000000..eb05a242c
--- /dev/null
+++ b/group__KdlSolver.html
@@ -0,0 +1,103 @@
+
+
+
+
+
+
+
+kinematics-dynamics: KdlSolver
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/group__KdlTreeSolver.html b/group__KdlTreeSolver.html
new file mode 100644
index 000000000..5d72f87ae
--- /dev/null
+++ b/group__KdlTreeSolver.html
@@ -0,0 +1,94 @@
+
+
+
+
+
+
+
+kinematics-dynamics: KdlTreeSolver
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/group__KdlVectorConverterLib.html b/group__KdlVectorConverterLib.html
new file mode 100644
index 000000000..48bc007cb
--- /dev/null
+++ b/group__KdlVectorConverterLib.html
@@ -0,0 +1,84 @@
+
+
+
+
+
+
+
+kinematics-dynamics: KdlVectorConverterLib
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Contains classes related to KDL and std::vector classes.
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Contains utilities related to conversion mechanisms between different coordinate and orientation systems.
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Contains classes related to Screw Theory solvers and tools.
+More...
+
+
+
Proof of concept for a kinematics library based on screw theory concepts applied to robotics. This implementation is mainly focused on solving inverse kinematics problems in an efficient and effective manner via closed-form geometric solutions. Comparing this approach with a tradicional numeric-based approach yields ([4]):
+- faster solutions, since there are no iterations involved;
+- exact solutions, since the direct formulation guarantees convergence;
+- multiple solutions and the possibility to choose the better ones.
+
+
- See also
- [1]
+
+
+
◆ normalizeAngle()
+
+
+
+
+
+
+
+
+ | double roboticslab::normalizeAngle |
+ ( |
+ double |
+ angle | ) |
+ |
+
+
+ |
+
+inline |
+
+
+
+
Values that exceed [-pi pi] are normalized to fit this range. Values close to -pi are approximated as pi.
+
- Parameters
-
+
+ | angle | Magnitude of the requested angle. |
+
+
+
+
- Returns
- Normalized angle.
+
+
+
+
+
◆ vectorPow2()
+
+
+
+
+
+
+
+
+ | KDL::Rotation roboticslab::vectorPow2 |
+ ( |
+ const KDL::Vector & |
+ v | ) |
+ |
+
+
+ |
+
+inline |
+
+
+
+
Given a column-vector v, computes v*v'.
+
- Parameters
-
+
+
+
+
- Returns
- Resulting square matrix.
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
A small mathematical library, mostly for performing transformations between angle representations.
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
The TrajGen library is a collection of classes for trajectory generation.
+More...
+
+
+
The TrajGen library is a collection of classes for trajectory generation. For now the functions' implementations are so short that they have been programmed inline, so for now the library is actually header-based (no actual real static/dynamic library to be linked).
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Contains kinematics-dynamics libraries that implement YARP device interfaces and therefore can be invoked as YARP plugins.
+More...
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Running example with teoSim First we must run a YARP name server if it is not running in our current namespace:
[on terminal 1] yarp server
+
What mostly changes is the library command line invocation. We also change the server port name. The following is an example for the simulated robot's right arm.
[on terminal 2] teoSim
+[on terminal 3] yarpdev --device BasicCartesianControl --name /teoSim/rightArm/CartesianControl --kinematics teo-fixedTrunk-rightArm-fetch.ini --local /BasicCartesianControl/teoSim/rightArm --remote /teoSim/rightArm
+[on terminal 4] ./cartesianControlExample
+[on possible terminal 5] yarp rpc /teoSim/rightArm/CartesianControl/rpc:s (for manual operation)
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is an example of the use of YarpTinyMath.
+
+
+Legal
+
Copyright: (C) 2013 Universidad Carlos III de Madrid
+
Author: Juan G. Victores
+
CopyPolicy: Released under the terms of the LGPLv2.1 or later, see license/LGPL.TXT
+
+Building
+
cd examples/cpp/exampleYarpTinyMath/
+mkdir build; cd build; cmake ..
+make -j3
+
+Running
+
./exampleYarpTinyMath
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Creates an instance of roboticslab::FtCompensation.
+More...
+
+ |
+| class | roboticslab::FtCompensation |
+| | Produces motion in the direction of an externally applied force measured by a force-torque sensor (pretty much mimicking a classical gravity compensation app). More...
|
+| |
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/group__keyboardController.html b/group__keyboardController.html
new file mode 100644
index 000000000..8812133c4
--- /dev/null
+++ b/group__keyboardController.html
@@ -0,0 +1,97 @@
+
+
+
+
+
+
+
+kinematics-dynamics: keyboardController
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/group__kinematics-dynamics-applications.html b/group__kinematics-dynamics-applications.html
new file mode 100644
index 000000000..3da975725
--- /dev/null
+++ b/group__kinematics-dynamics-applications.html
@@ -0,0 +1,84 @@
+
+
+
+
+
+
+
+kinematics-dynamics: kinematics-dynamics Applications (Collections of Programs)
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
kinematics-dynamics applications (collections of programs).
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
kinematics-dynamics examples.
+More...
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
kinematics-dynamics libraries.
+More...
+
+ |
+| | YarpPlugins |
+| | Contains kinematics-dynamics libraries that implement YARP device interfaces and therefore can be invoked as YARP plugins.
|
+| |
+| | KdlVectorConverterLib |
+| | Contains classes related to KDL and std::vector classes.
|
+| |
+| | KinematicRepresentationLib |
+| | Contains utilities related to conversion mechanisms between different coordinate and orientation systems.
|
+| |
+| | ScrewTheoryLib |
+| | Contains classes related to Screw Theory solvers and tools.
|
+| |
+| | TrajGen |
+| | The TrajGen library is a collection of classes for trajectory generation.
|
+| |
+| | TinyMath |
+| | A small mathematical library, mostly for performing transformations between angle representations.
|
+| |
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
kinematics-dynamics programs.
+More...
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
kinematics-dynamics tests.
+More...
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Legal
+
Copyright: (C) 2018 Universidad Carlos III de Madrid;
+
CopyPolicy: Released under the terms of the LGPLv2.1 or later, see license/LGPL.TXT
+
Building
cd examples/cpp/exampleScrewTheoryTrajectory/
+mkdir build; cd build; cmake ..
+make -j$(nproc)
+
Running example with teoSim First we must run a YARP name server if it is not running in our current namespace:
[on terminal 1] yarp server
+
What mostly changes is the library command line invocation. We also change the server port name. The following is an example for the simulated robot's right arm.
[on terminal 2] teoSim
+[on terminal 3] yarpdev --device BasicCartesianControl --name /teoSim/leftArm/CartesianControl --kinematics teo-fixedTrunk-leftArm-fetch.ini --robot remote_controlboard --local /BasicCartesianControl/teoSim/leftArm --remote /teoSim/leftArm --angleRepr axisAngle
+[on terminal 4] ./exampleScrewTheoryTrajectory
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/hierarchy.html b/hierarchy.html
new file mode 100644
index 000000000..24c08906e
--- /dev/null
+++ b/hierarchy.html
@@ -0,0 +1,169 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Class Hierarchy
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This inheritance list is sorted roughly, but not completely, alphabetically:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+

+
Kinematics and dynamics solvers and controllers.
+
Link to Doxygen generated documentation: https://robots.uc3m.es/kinematics-dynamics/
+
+
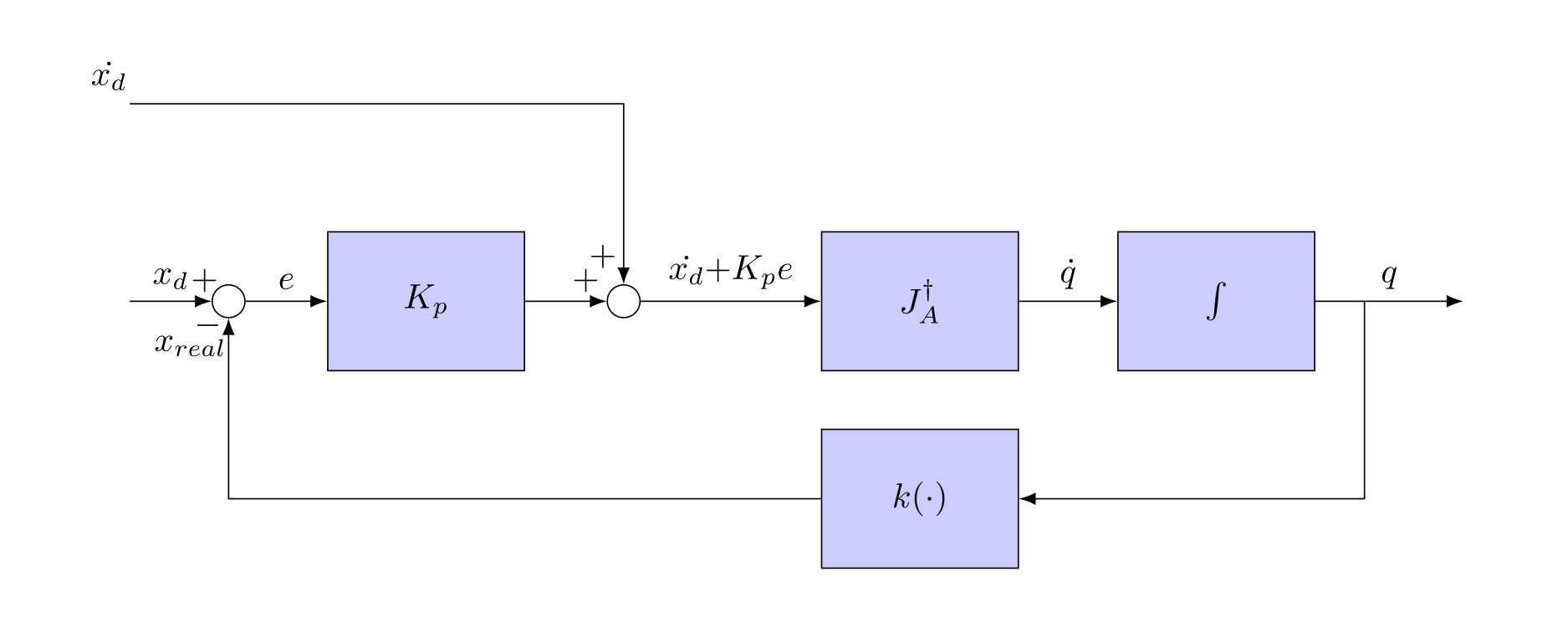
+
+Installation
+
Installation instructions for installing from source can be found here.
+
+Contributing
+
+Posting Issues
+
+- Read CONTRIBUTING.md
+- Post an issue / Feature request / Specific documentation request
+
+
+Fork & Pull Request
+
+- Fork the repository
+- Create your feature branch (
git checkout -b my-new-feature) off the master branch, following the Forking Git workflow
+- Commit your changes
+- Push to the branch (
git push origin my-new-feature)
+- Create a new Pull Request
+
+
+Citation
+
If you found this project useful, please consider citing the following works:
+
+
Bartek Lukawski, Ignacio Montesino Valle, Juan G. Victores, Alberto Jardón, and Carlos Balaguer. An inverse kinematics problem solver based on screw theory for manipulator arms. In XLIII Jornadas de Automática, pages 864–869. Universidade da Coruña, 2022.
+
@inproceedings{lukawski2022jjaa,
+
author = {{\L}ukawski, Bartek and Montesino Valle, Ignacio and Victores, Juan G. and Jardón, Alberto and Balaguer, Carlos},
+
title = {An inverse kinematics problem solver based on screw theory for manipulator arms},
+
booktitle = {XLIII Jornadas de Automática},
+
year = {2022},
+
pages = {864--869},
+
publisher = {Universidade da Coruña},
+
doi = {10.17979/spudc.9788497498418.0864},
+
}
+
+
Edwin Daniel Oña, Bartek Lukawski, Alberto Jardón, and Carlos Balaguer. A modular framework to facilitate the control of an assistive robotic arm using visual servoing and proximity sensing. In IEEE Int. Conf. on Autonomous Robot Systems and Competitions (ICARSC), pages 28–33, 2020.
+
@inproceedings{eona2020icarsc,
+
author = {{O\~na}, Edwin Daniel and {\L}ukawski, Bartek and Jardón, Alberto and Balaguer, Carlos},
+
title = {A modular framework to facilitate the control of an assistive robotic arm using visual servoing and proximity sensing},
+
booktitle = {IEEE Int. Conf. on Autonomous Robot Systems and Competitions (ICARSC)},
+
year = {2020},
+
pages = {28--33},
+
doi = {10.1109/ICARSC49921.2020.9096146},
+
}
+
Bartek Lukawski, Juan G. Victores, and Carlos Balaguer. A generic controller for teleoperation on robotic manipulators using low-cost devices. In XLIV Jornadas de Automática, pages 785–788. Universidade da Coruña, 2023.
+
@inproceedings{lukawski2023jjaa,
+
author = {{\L}ukawski, Bartek and Victores, Juan G. and Balaguer, Carlos},
+
title = {A generic controller for teleoperation on robotic manipulators using low-cost devices},
+
booktitle = {XLIV Jornadas de Automática},
+
year = {2023},
+
pages = {785--788},
+
publisher = {Universidade da Coruña},
+
doi = {10.17979/spudc.9788497498609.785},
+
}
+
+Status
+

+

+

+
+Similar and Related Projects
+
+Quaternions
+
+
+Fast Solvers
+
+
+IK-Solvers
+
+
+Kinematics and Dynamics
+
+
+Path-Planning, Trajectory generation and optimization
+
+
+Humanoid-oriented
+
+
+
",options:{classes:{},disabled:!1,create:null},_createWidget:function(e,s){s=t(s||this.defaultElement||this)[0],this.element=t(s),this.uuid=i++,this.eventNamespace="."+this.widgetName+this.uuid,this.bindings=t(),this.hoverable=t(),this.focusable=t(),this.classesElementLookup={},s!==this&&(t.data(s,this.widgetFullName,this),this._on(!0,this.element,{remove:function(t){t.target===s&&this.destroy()}}),this.document=t(s.style?s.ownerDocument:s.document||s),this.window=t(this.document[0].defaultView||this.document[0].parentWindow)),this.options=t.widget.extend({},this.options,this._getCreateOptions(),e),this._create(),this.options.disabled&&this._setOptionDisabled(this.options.disabled),this._trigger("create",null,this._getCreateEventData()),this._init()},_getCreateOptions:function(){return{}},_getCreateEventData:t.noop,_create:t.noop,_init:t.noop,destroy:function(){var e=this;this._destroy(),t.each(this.classesElementLookup,function(t,i){e._removeClass(i,t)}),this.element.off(this.eventNamespace).removeData(this.widgetFullName),this.widget().off(this.eventNamespace).removeAttr("aria-disabled"),this.bindings.off(this.eventNamespace)},_destroy:t.noop,widget:function(){return this.element},option:function(e,i){var s,n,o,a=e;if(0===arguments.length)return t.widget.extend({},this.options);if("string"==typeof e)if(a={},s=e.split("."),e=s.shift(),s.length){for(n=a[e]=t.widget.extend({},this.options[e]),o=0;s.length-1>o;o++)n[s[o]]=n[s[o]]||{},n=n[s[o]];if(e=s.pop(),1===arguments.length)return void 0===n[e]?null:n[e];n[e]=i}else{if(1===arguments.length)return void 0===this.options[e]?null:this.options[e];a[e]=i}return this._setOptions(a),this},_setOptions:function(t){var e;for(e in t)this._setOption(e,t[e]);return this},_setOption:function(t,e){return"classes"===t&&this._setOptionClasses(e),this.options[t]=e,"disabled"===t&&this._setOptionDisabled(e),this},_setOptionClasses:function(e){var i,s,n;for(i in e)n=this.classesElementLookup[i],e[i]!==this.options.classes[i]&&n&&n.length&&(s=t(n.get()),this._removeClass(n,i),s.addClass(this._classes({element:s,keys:i,classes:e,add:!0})))},_setOptionDisabled:function(t){this._toggleClass(this.widget(),this.widgetFullName+"-disabled",null,!!t),t&&(this._removeClass(this.hoverable,null,"ui-state-hover"),this._removeClass(this.focusable,null,"ui-state-focus"))},enable:function(){return this._setOptions({disabled:!1})},disable:function(){return this._setOptions({disabled:!0})},_classes:function(e){function i(i,o){var a,r;for(r=0;i.length>r;r++)a=n.classesElementLookup[i[r]]||t(),a=e.add?t(t.unique(a.get().concat(e.element.get()))):t(a.not(e.element).get()),n.classesElementLookup[i[r]]=a,s.push(i[r]),o&&e.classes[i[r]]&&s.push(e.classes[i[r]])}var s=[],n=this;return e=t.extend({element:this.element,classes:this.options.classes||{}},e),this._on(e.element,{remove:"_untrackClassesElement"}),e.keys&&i(e.keys.match(/\S+/g)||[],!0),e.extra&&i(e.extra.match(/\S+/g)||[]),s.join(" ")},_untrackClassesElement:function(e){var i=this;t.each(i.classesElementLookup,function(s,n){-1!==t.inArray(e.target,n)&&(i.classesElementLookup[s]=t(n.not(e.target).get()))})},_removeClass:function(t,e,i){return this._toggleClass(t,e,i,!1)},_addClass:function(t,e,i){return this._toggleClass(t,e,i,!0)},_toggleClass:function(t,e,i,s){s="boolean"==typeof s?s:i;var n="string"==typeof t||null===t,o={extra:n?e:i,keys:n?t:e,element:n?this.element:t,add:s};return o.element.toggleClass(this._classes(o),s),this},_on:function(e,i,s){var n,o=this;"boolean"!=typeof e&&(s=i,i=e,e=!1),s?(i=n=t(i),this.bindings=this.bindings.add(i)):(s=i,i=this.element,n=this.widget()),t.each(s,function(s,a){function r(){return e||o.options.disabled!==!0&&!t(this).hasClass("ui-state-disabled")?("string"==typeof a?o[a]:a).apply(o,arguments):void 0}"string"!=typeof a&&(r.guid=a.guid=a.guid||r.guid||t.guid++);var h=s.match(/^([\w:-]*)\s*(.*)$/),l=h[1]+o.eventNamespace,c=h[2];c?n.on(l,c,r):i.on(l,r)})},_off:function(e,i){i=(i||"").split(" ").join(this.eventNamespace+" ")+this.eventNamespace,e.off(i).off(i),this.bindings=t(this.bindings.not(e).get()),this.focusable=t(this.focusable.not(e).get()),this.hoverable=t(this.hoverable.not(e).get())},_delay:function(t,e){function i(){return("string"==typeof t?s[t]:t).apply(s,arguments)}var s=this;return setTimeout(i,e||0)},_hoverable:function(e){this.hoverable=this.hoverable.add(e),this._on(e,{mouseenter:function(e){this._addClass(t(e.currentTarget),null,"ui-state-hover")},mouseleave:function(e){this._removeClass(t(e.currentTarget),null,"ui-state-hover")}})},_focusable:function(e){this.focusable=this.focusable.add(e),this._on(e,{focusin:function(e){this._addClass(t(e.currentTarget),null,"ui-state-focus")},focusout:function(e){this._removeClass(t(e.currentTarget),null,"ui-state-focus")}})},_trigger:function(e,i,s){var n,o,a=this.options[e];if(s=s||{},i=t.Event(i),i.type=(e===this.widgetEventPrefix?e:this.widgetEventPrefix+e).toLowerCase(),i.target=this.element[0],o=i.originalEvent)for(n in o)n in i||(i[n]=o[n]);return this.element.trigger(i,s),!(t.isFunction(a)&&a.apply(this.element[0],[i].concat(s))===!1||i.isDefaultPrevented())}},t.each({show:"fadeIn",hide:"fadeOut"},function(e,i){t.Widget.prototype["_"+e]=function(s,n,o){"string"==typeof n&&(n={effect:n});var a,r=n?n===!0||"number"==typeof n?i:n.effect||i:e;n=n||{},"number"==typeof n&&(n={duration:n}),a=!t.isEmptyObject(n),n.complete=o,n.delay&&s.delay(n.delay),a&&t.effects&&t.effects.effect[r]?s[e](n):r!==e&&s[r]?s[r](n.duration,n.easing,o):s.queue(function(i){t(this)[e](),o&&o.call(s[0]),i()})}}),t.widget,function(){function e(t,e,i){return[parseFloat(t[0])*(u.test(t[0])?e/100:1),parseFloat(t[1])*(u.test(t[1])?i/100:1)]}function i(e,i){return parseInt(t.css(e,i),10)||0}function s(e){var i=e[0];return 9===i.nodeType?{width:e.width(),height:e.height(),offset:{top:0,left:0}}:t.isWindow(i)?{width:e.width(),height:e.height(),offset:{top:e.scrollTop(),left:e.scrollLeft()}}:i.preventDefault?{width:0,height:0,offset:{top:i.pageY,left:i.pageX}}:{width:e.outerWidth(),height:e.outerHeight(),offset:e.offset()}}var n,o=Math.max,a=Math.abs,r=/left|center|right/,h=/top|center|bottom/,l=/[\+\-]\d+(\.[\d]+)?%?/,c=/^\w+/,u=/%$/,d=t.fn.position;t.position={scrollbarWidth:function(){if(void 0!==n)return n;var e,i,s=t("
"),o=s.children()[0];return t("body").append(s),e=o.offsetWidth,s.css("overflow","scroll"),i=o.offsetWidth,e===i&&(i=s[0].clientWidth),s.remove(),n=e-i},getScrollInfo:function(e){var i=e.isWindow||e.isDocument?"":e.element.css("overflow-x"),s=e.isWindow||e.isDocument?"":e.element.css("overflow-y"),n="scroll"===i||"auto"===i&&e.width
i?"left":e>0?"right":"center",vertical:0>r?"top":s>0?"bottom":"middle"};l>p&&p>a(e+i)&&(u.horizontal="center"),c>f&&f>a(s+r)&&(u.vertical="middle"),u.important=o(a(e),a(i))>o(a(s),a(r))?"horizontal":"vertical",n.using.call(this,t,u)}),h.offset(t.extend(D,{using:r}))})},t.ui.position={fit:{left:function(t,e){var i,s=e.within,n=s.isWindow?s.scrollLeft:s.offset.left,a=s.width,r=t.left-e.collisionPosition.marginLeft,h=n-r,l=r+e.collisionWidth-a-n;e.collisionWidth>a?h>0&&0>=l?(i=t.left+h+e.collisionWidth-a-n,t.left+=h-i):t.left=l>0&&0>=h?n:h>l?n+a-e.collisionWidth:n:h>0?t.left+=h:l>0?t.left-=l:t.left=o(t.left-r,t.left)},top:function(t,e){var i,s=e.within,n=s.isWindow?s.scrollTop:s.offset.top,a=e.within.height,r=t.top-e.collisionPosition.marginTop,h=n-r,l=r+e.collisionHeight-a-n;e.collisionHeight>a?h>0&&0>=l?(i=t.top+h+e.collisionHeight-a-n,t.top+=h-i):t.top=l>0&&0>=h?n:h>l?n+a-e.collisionHeight:n:h>0?t.top+=h:l>0?t.top-=l:t.top=o(t.top-r,t.top)}},flip:{left:function(t,e){var i,s,n=e.within,o=n.offset.left+n.scrollLeft,r=n.width,h=n.isWindow?n.scrollLeft:n.offset.left,l=t.left-e.collisionPosition.marginLeft,c=l-h,u=l+e.collisionWidth-r-h,d="left"===e.my[0]?-e.elemWidth:"right"===e.my[0]?e.elemWidth:0,p="left"===e.at[0]?e.targetWidth:"right"===e.at[0]?-e.targetWidth:0,f=-2*e.offset[0];0>c?(i=t.left+d+p+f+e.collisionWidth-r-o,(0>i||a(c)>i)&&(t.left+=d+p+f)):u>0&&(s=t.left-e.collisionPosition.marginLeft+d+p+f-h,(s>0||u>a(s))&&(t.left+=d+p+f))},top:function(t,e){var i,s,n=e.within,o=n.offset.top+n.scrollTop,r=n.height,h=n.isWindow?n.scrollTop:n.offset.top,l=t.top-e.collisionPosition.marginTop,c=l-h,u=l+e.collisionHeight-r-h,d="top"===e.my[1],p=d?-e.elemHeight:"bottom"===e.my[1]?e.elemHeight:0,f="top"===e.at[1]?e.targetHeight:"bottom"===e.at[1]?-e.targetHeight:0,m=-2*e.offset[1];0>c?(s=t.top+p+f+m+e.collisionHeight-r-o,(0>s||a(c)>s)&&(t.top+=p+f+m)):u>0&&(i=t.top-e.collisionPosition.marginTop+p+f+m-h,(i>0||u>a(i))&&(t.top+=p+f+m))}},flipfit:{left:function(){t.ui.position.flip.left.apply(this,arguments),t.ui.position.fit.left.apply(this,arguments)},top:function(){t.ui.position.flip.top.apply(this,arguments),t.ui.position.fit.top.apply(this,arguments)}}}}(),t.ui.position,t.extend(t.expr[":"],{data:t.expr.createPseudo?t.expr.createPseudo(function(e){return function(i){return!!t.data(i,e)}}):function(e,i,s){return!!t.data(e,s[3])}}),t.fn.extend({disableSelection:function(){var t="onselectstart"in document.createElement("div")?"selectstart":"mousedown";return function(){return this.on(t+".ui-disableSelection",function(t){t.preventDefault()})}}(),enableSelection:function(){return this.off(".ui-disableSelection")}}),t.ui.focusable=function(i,s){var n,o,a,r,h,l=i.nodeName.toLowerCase();return"area"===l?(n=i.parentNode,o=n.name,i.href&&o&&"map"===n.nodeName.toLowerCase()?(a=t("img[usemap='#"+o+"']"),a.length>0&&a.is(":visible")):!1):(/^(input|select|textarea|button|object)$/.test(l)?(r=!i.disabled,r&&(h=t(i).closest("fieldset")[0],h&&(r=!h.disabled))):r="a"===l?i.href||s:s,r&&t(i).is(":visible")&&e(t(i)))},t.extend(t.expr[":"],{focusable:function(e){return t.ui.focusable(e,null!=t.attr(e,"tabindex"))}}),t.ui.focusable,t.fn.form=function(){return"string"==typeof this[0].form?this.closest("form"):t(this[0].form)},t.ui.formResetMixin={_formResetHandler:function(){var e=t(this);setTimeout(function(){var i=e.data("ui-form-reset-instances");t.each(i,function(){this.refresh()})})},_bindFormResetHandler:function(){if(this.form=this.element.form(),this.form.length){var t=this.form.data("ui-form-reset-instances")||[];t.length||this.form.on("reset.ui-form-reset",this._formResetHandler),t.push(this),this.form.data("ui-form-reset-instances",t)}},_unbindFormResetHandler:function(){if(this.form.length){var e=this.form.data("ui-form-reset-instances");e.splice(t.inArray(this,e),1),e.length?this.form.data("ui-form-reset-instances",e):this.form.removeData("ui-form-reset-instances").off("reset.ui-form-reset")}}},"1.7"===t.fn.jquery.substring(0,3)&&(t.each(["Width","Height"],function(e,i){function s(e,i,s,o){return t.each(n,function(){i-=parseFloat(t.css(e,"padding"+this))||0,s&&(i-=parseFloat(t.css(e,"border"+this+"Width"))||0),o&&(i-=parseFloat(t.css(e,"margin"+this))||0)}),i}var n="Width"===i?["Left","Right"]:["Top","Bottom"],o=i.toLowerCase(),a={innerWidth:t.fn.innerWidth,innerHeight:t.fn.innerHeight,outerWidth:t.fn.outerWidth,outerHeight:t.fn.outerHeight};t.fn["inner"+i]=function(e){return void 0===e?a["inner"+i].call(this):this.each(function(){t(this).css(o,s(this,e)+"px")})},t.fn["outer"+i]=function(e,n){return"number"!=typeof e?a["outer"+i].call(this,e):this.each(function(){t(this).css(o,s(this,e,!0,n)+"px")})}}),t.fn.addBack=function(t){return this.add(null==t?this.prevObject:this.prevObject.filter(t))}),t.ui.keyCode={BACKSPACE:8,COMMA:188,DELETE:46,DOWN:40,END:35,ENTER:13,ESCAPE:27,HOME:36,LEFT:37,PAGE_DOWN:34,PAGE_UP:33,PERIOD:190,RIGHT:39,SPACE:32,TAB:9,UP:38},t.ui.escapeSelector=function(){var t=/([!"#$%&'()*+,./:;<=>?@[\]^`{|}~])/g;return function(e){return e.replace(t,"\\$1")}}(),t.fn.labels=function(){var e,i,s,n,o;return this[0].labels&&this[0].labels.length?this.pushStack(this[0].labels):(n=this.eq(0).parents("label"),s=this.attr("id"),s&&(e=this.eq(0).parents().last(),o=e.add(e.length?e.siblings():this.siblings()),i="label[for='"+t.ui.escapeSelector(s)+"']",n=n.add(o.find(i).addBack(i))),this.pushStack(n))},t.fn.scrollParent=function(e){var i=this.css("position"),s="absolute"===i,n=e?/(auto|scroll|hidden)/:/(auto|scroll)/,o=this.parents().filter(function(){var e=t(this);return s&&"static"===e.css("position")?!1:n.test(e.css("overflow")+e.css("overflow-y")+e.css("overflow-x"))}).eq(0);return"fixed"!==i&&o.length?o:t(this[0].ownerDocument||document)},t.extend(t.expr[":"],{tabbable:function(e){var i=t.attr(e,"tabindex"),s=null!=i;return(!s||i>=0)&&t.ui.focusable(e,s)}}),t.fn.extend({uniqueId:function(){var t=0;return function(){return this.each(function(){this.id||(this.id="ui-id-"+ ++t)})}}(),removeUniqueId:function(){return this.each(function(){/^ui-id-\d+$/.test(this.id)&&t(this).removeAttr("id")})}}),t.ui.ie=!!/msie [\w.]+/.exec(navigator.userAgent.toLowerCase());var n=!1;t(document).on("mouseup",function(){n=!1}),t.widget("ui.mouse",{version:"1.12.1",options:{cancel:"input, textarea, button, select, option",distance:1,delay:0},_mouseInit:function(){var e=this;this.element.on("mousedown."+this.widgetName,function(t){return e._mouseDown(t)}).on("click."+this.widgetName,function(i){return!0===t.data(i.target,e.widgetName+".preventClickEvent")?(t.removeData(i.target,e.widgetName+".preventClickEvent"),i.stopImmediatePropagation(),!1):void 0}),this.started=!1},_mouseDestroy:function(){this.element.off("."+this.widgetName),this._mouseMoveDelegate&&this.document.off("mousemove."+this.widgetName,this._mouseMoveDelegate).off("mouseup."+this.widgetName,this._mouseUpDelegate)},_mouseDown:function(e){if(!n){this._mouseMoved=!1,this._mouseStarted&&this._mouseUp(e),this._mouseDownEvent=e;var i=this,s=1===e.which,o="string"==typeof this.options.cancel&&e.target.nodeName?t(e.target).closest(this.options.cancel).length:!1;return s&&!o&&this._mouseCapture(e)?(this.mouseDelayMet=!this.options.delay,this.mouseDelayMet||(this._mouseDelayTimer=setTimeout(function(){i.mouseDelayMet=!0},this.options.delay)),this._mouseDistanceMet(e)&&this._mouseDelayMet(e)&&(this._mouseStarted=this._mouseStart(e)!==!1,!this._mouseStarted)?(e.preventDefault(),!0):(!0===t.data(e.target,this.widgetName+".preventClickEvent")&&t.removeData(e.target,this.widgetName+".preventClickEvent"),this._mouseMoveDelegate=function(t){return i._mouseMove(t)},this._mouseUpDelegate=function(t){return i._mouseUp(t)},this.document.on("mousemove."+this.widgetName,this._mouseMoveDelegate).on("mouseup."+this.widgetName,this._mouseUpDelegate),e.preventDefault(),n=!0,!0)):!0}},_mouseMove:function(e){if(this._mouseMoved){if(t.ui.ie&&(!document.documentMode||9>document.documentMode)&&!e.button)return this._mouseUp(e);if(!e.which)if(e.originalEvent.altKey||e.originalEvent.ctrlKey||e.originalEvent.metaKey||e.originalEvent.shiftKey)this.ignoreMissingWhich=!0;else if(!this.ignoreMissingWhich)return this._mouseUp(e)}return(e.which||e.button)&&(this._mouseMoved=!0),this._mouseStarted?(this._mouseDrag(e),e.preventDefault()):(this._mouseDistanceMet(e)&&this._mouseDelayMet(e)&&(this._mouseStarted=this._mouseStart(this._mouseDownEvent,e)!==!1,this._mouseStarted?this._mouseDrag(e):this._mouseUp(e)),!this._mouseStarted)},_mouseUp:function(e){this.document.off("mousemove."+this.widgetName,this._mouseMoveDelegate).off("mouseup."+this.widgetName,this._mouseUpDelegate),this._mouseStarted&&(this._mouseStarted=!1,e.target===this._mouseDownEvent.target&&t.data(e.target,this.widgetName+".preventClickEvent",!0),this._mouseStop(e)),this._mouseDelayTimer&&(clearTimeout(this._mouseDelayTimer),delete this._mouseDelayTimer),this.ignoreMissingWhich=!1,n=!1,e.preventDefault()},_mouseDistanceMet:function(t){return Math.max(Math.abs(this._mouseDownEvent.pageX-t.pageX),Math.abs(this._mouseDownEvent.pageY-t.pageY))>=this.options.distance},_mouseDelayMet:function(){return this.mouseDelayMet},_mouseStart:function(){},_mouseDrag:function(){},_mouseStop:function(){},_mouseCapture:function(){return!0}}),t.ui.plugin={add:function(e,i,s){var n,o=t.ui[e].prototype;for(n in s)o.plugins[n]=o.plugins[n]||[],o.plugins[n].push([i,s[n]])},call:function(t,e,i,s){var n,o=t.plugins[e];if(o&&(s||t.element[0].parentNode&&11!==t.element[0].parentNode.nodeType))for(n=0;o.length>n;n++)t.options[o[n][0]]&&o[n][1].apply(t.element,i)}},t.widget("ui.resizable",t.ui.mouse,{version:"1.12.1",widgetEventPrefix:"resize",options:{alsoResize:!1,animate:!1,animateDuration:"slow",animateEasing:"swing",aspectRatio:!1,autoHide:!1,classes:{"ui-resizable-se":"ui-icon ui-icon-gripsmall-diagonal-se"},containment:!1,ghost:!1,grid:!1,handles:"e,s,se",helper:!1,maxHeight:null,maxWidth:null,minHeight:10,minWidth:10,zIndex:90,resize:null,start:null,stop:null},_num:function(t){return parseFloat(t)||0},_isNumber:function(t){return!isNaN(parseFloat(t))},_hasScroll:function(e,i){if("hidden"===t(e).css("overflow"))return!1;var s=i&&"left"===i?"scrollLeft":"scrollTop",n=!1;return e[s]>0?!0:(e[s]=1,n=e[s]>0,e[s]=0,n)},_create:function(){var e,i=this.options,s=this;this._addClass("ui-resizable"),t.extend(this,{_aspectRatio:!!i.aspectRatio,aspectRatio:i.aspectRatio,originalElement:this.element,_proportionallyResizeElements:[],_helper:i.helper||i.ghost||i.animate?i.helper||"ui-resizable-helper":null}),this.element[0].nodeName.match(/^(canvas|textarea|input|select|button|img)$/i)&&(this.element.wrap(t("").css({position:this.element.css("position"),width:this.element.outerWidth(),height:this.element.outerHeight(),top:this.element.css("top"),left:this.element.css("left")})),this.element=this.element.parent().data("ui-resizable",this.element.resizable("instance")),this.elementIsWrapper=!0,e={marginTop:this.originalElement.css("marginTop"),marginRight:this.originalElement.css("marginRight"),marginBottom:this.originalElement.css("marginBottom"),marginLeft:this.originalElement.css("marginLeft")},this.element.css(e),this.originalElement.css("margin",0),this.originalResizeStyle=this.originalElement.css("resize"),this.originalElement.css("resize","none"),this._proportionallyResizeElements.push(this.originalElement.css({position:"static",zoom:1,display:"block"})),this.originalElement.css(e),this._proportionallyResize()),this._setupHandles(),i.autoHide&&t(this.element).on("mouseenter",function(){i.disabled||(s._removeClass("ui-resizable-autohide"),s._handles.show())}).on("mouseleave",function(){i.disabled||s.resizing||(s._addClass("ui-resizable-autohide"),s._handles.hide())}),this._mouseInit()},_destroy:function(){this._mouseDestroy();var e,i=function(e){t(e).removeData("resizable").removeData("ui-resizable").off(".resizable").find(".ui-resizable-handle").remove()};return this.elementIsWrapper&&(i(this.element),e=this.element,this.originalElement.css({position:e.css("position"),width:e.outerWidth(),height:e.outerHeight(),top:e.css("top"),left:e.css("left")}).insertAfter(e),e.remove()),this.originalElement.css("resize",this.originalResizeStyle),i(this.originalElement),this},_setOption:function(t,e){switch(this._super(t,e),t){case"handles":this._removeHandles(),this._setupHandles();break;default:}},_setupHandles:function(){var e,i,s,n,o,a=this.options,r=this;if(this.handles=a.handles||(t(".ui-resizable-handle",this.element).length?{n:".ui-resizable-n",e:".ui-resizable-e",s:".ui-resizable-s",w:".ui-resizable-w",se:".ui-resizable-se",sw:".ui-resizable-sw",ne:".ui-resizable-ne",nw:".ui-resizable-nw"}:"e,s,se"),this._handles=t(),this.handles.constructor===String)for("all"===this.handles&&(this.handles="n,e,s,w,se,sw,ne,nw"),s=this.handles.split(","),this.handles={},i=0;s.length>i;i++)e=t.trim(s[i]),n="ui-resizable-"+e,o=t(""),this._addClass(o,"ui-resizable-handle "+n),o.css({zIndex:a.zIndex}),this.handles[e]=".ui-resizable-"+e,this.element.append(o);this._renderAxis=function(e){var i,s,n,o;e=e||this.element;for(i in this.handles)this.handles[i].constructor===String?this.handles[i]=this.element.children(this.handles[i]).first().show():(this.handles[i].jquery||this.handles[i].nodeType)&&(this.handles[i]=t(this.handles[i]),this._on(this.handles[i],{mousedown:r._mouseDown})),this.elementIsWrapper&&this.originalElement[0].nodeName.match(/^(textarea|input|select|button)$/i)&&(s=t(this.handles[i],this.element),o=/sw|ne|nw|se|n|s/.test(i)?s.outerHeight():s.outerWidth(),n=["padding",/ne|nw|n/.test(i)?"Top":/se|sw|s/.test(i)?"Bottom":/^e$/.test(i)?"Right":"Left"].join(""),e.css(n,o),this._proportionallyResize()),this._handles=this._handles.add(this.handles[i])},this._renderAxis(this.element),this._handles=this._handles.add(this.element.find(".ui-resizable-handle")),this._handles.disableSelection(),this._handles.on("mouseover",function(){r.resizing||(this.className&&(o=this.className.match(/ui-resizable-(se|sw|ne|nw|n|e|s|w)/i)),r.axis=o&&o[1]?o[1]:"se")}),a.autoHide&&(this._handles.hide(),this._addClass("ui-resizable-autohide"))},_removeHandles:function(){this._handles.remove()},_mouseCapture:function(e){var i,s,n=!1;for(i in this.handles)s=t(this.handles[i])[0],(s===e.target||t.contains(s,e.target))&&(n=!0);return!this.options.disabled&&n},_mouseStart:function(e){var i,s,n,o=this.options,a=this.element;return this.resizing=!0,this._renderProxy(),i=this._num(this.helper.css("left")),s=this._num(this.helper.css("top")),o.containment&&(i+=t(o.containment).scrollLeft()||0,s+=t(o.containment).scrollTop()||0),this.offset=this.helper.offset(),this.position={left:i,top:s},this.size=this._helper?{width:this.helper.width(),height:this.helper.height()}:{width:a.width(),height:a.height()},this.originalSize=this._helper?{width:a.outerWidth(),height:a.outerHeight()}:{width:a.width(),height:a.height()},this.sizeDiff={width:a.outerWidth()-a.width(),height:a.outerHeight()-a.height()},this.originalPosition={left:i,top:s},this.originalMousePosition={left:e.pageX,top:e.pageY},this.aspectRatio="number"==typeof o.aspectRatio?o.aspectRatio:this.originalSize.width/this.originalSize.height||1,n=t(".ui-resizable-"+this.axis).css("cursor"),t("body").css("cursor","auto"===n?this.axis+"-resize":n),this._addClass("ui-resizable-resizing"),this._propagate("start",e),!0},_mouseDrag:function(e){var i,s,n=this.originalMousePosition,o=this.axis,a=e.pageX-n.left||0,r=e.pageY-n.top||0,h=this._change[o];return this._updatePrevProperties(),h?(i=h.apply(this,[e,a,r]),this._updateVirtualBoundaries(e.shiftKey),(this._aspectRatio||e.shiftKey)&&(i=this._updateRatio(i,e)),i=this._respectSize(i,e),this._updateCache(i),this._propagate("resize",e),s=this._applyChanges(),!this._helper&&this._proportionallyResizeElements.length&&this._proportionallyResize(),t.isEmptyObject(s)||(this._updatePrevProperties(),this._trigger("resize",e,this.ui()),this._applyChanges()),!1):!1},_mouseStop:function(e){this.resizing=!1;var i,s,n,o,a,r,h,l=this.options,c=this;return this._helper&&(i=this._proportionallyResizeElements,s=i.length&&/textarea/i.test(i[0].nodeName),n=s&&this._hasScroll(i[0],"left")?0:c.sizeDiff.height,o=s?0:c.sizeDiff.width,a={width:c.helper.width()-o,height:c.helper.height()-n},r=parseFloat(c.element.css("left"))+(c.position.left-c.originalPosition.left)||null,h=parseFloat(c.element.css("top"))+(c.position.top-c.originalPosition.top)||null,l.animate||this.element.css(t.extend(a,{top:h,left:r})),c.helper.height(c.size.height),c.helper.width(c.size.width),this._helper&&!l.animate&&this._proportionallyResize()),t("body").css("cursor","auto"),this._removeClass("ui-resizable-resizing"),this._propagate("stop",e),this._helper&&this.helper.remove(),!1},_updatePrevProperties:function(){this.prevPosition={top:this.position.top,left:this.position.left},this.prevSize={width:this.size.width,height:this.size.height}},_applyChanges:function(){var t={};return this.position.top!==this.prevPosition.top&&(t.top=this.position.top+"px"),this.position.left!==this.prevPosition.left&&(t.left=this.position.left+"px"),this.size.width!==this.prevSize.width&&(t.width=this.size.width+"px"),this.size.height!==this.prevSize.height&&(t.height=this.size.height+"px"),this.helper.css(t),t},_updateVirtualBoundaries:function(t){var e,i,s,n,o,a=this.options;o={minWidth:this._isNumber(a.minWidth)?a.minWidth:0,maxWidth:this._isNumber(a.maxWidth)?a.maxWidth:1/0,minHeight:this._isNumber(a.minHeight)?a.minHeight:0,maxHeight:this._isNumber(a.maxHeight)?a.maxHeight:1/0},(this._aspectRatio||t)&&(e=o.minHeight*this.aspectRatio,s=o.minWidth/this.aspectRatio,i=o.maxHeight*this.aspectRatio,n=o.maxWidth/this.aspectRatio,e>o.minWidth&&(o.minWidth=e),s>o.minHeight&&(o.minHeight=s),o.maxWidth>i&&(o.maxWidth=i),o.maxHeight>n&&(o.maxHeight=n)),this._vBoundaries=o},_updateCache:function(t){this.offset=this.helper.offset(),this._isNumber(t.left)&&(this.position.left=t.left),this._isNumber(t.top)&&(this.position.top=t.top),this._isNumber(t.height)&&(this.size.height=t.height),this._isNumber(t.width)&&(this.size.width=t.width)},_updateRatio:function(t){var e=this.position,i=this.size,s=this.axis;return this._isNumber(t.height)?t.width=t.height*this.aspectRatio:this._isNumber(t.width)&&(t.height=t.width/this.aspectRatio),"sw"===s&&(t.left=e.left+(i.width-t.width),t.top=null),"nw"===s&&(t.top=e.top+(i.height-t.height),t.left=e.left+(i.width-t.width)),t},_respectSize:function(t){var e=this._vBoundaries,i=this.axis,s=this._isNumber(t.width)&&e.maxWidth&&e.maxWidth
t.width,a=this._isNumber(t.height)&&e.minHeight&&e.minHeight>t.height,r=this.originalPosition.left+this.originalSize.width,h=this.originalPosition.top+this.originalSize.height,l=/sw|nw|w/.test(i),c=/nw|ne|n/.test(i);return o&&(t.width=e.minWidth),a&&(t.height=e.minHeight),s&&(t.width=e.maxWidth),n&&(t.height=e.maxHeight),o&&l&&(t.left=r-e.minWidth),s&&l&&(t.left=r-e.maxWidth),a&&c&&(t.top=h-e.minHeight),n&&c&&(t.top=h-e.maxHeight),t.width||t.height||t.left||!t.top?t.width||t.height||t.top||!t.left||(t.left=null):t.top=null,t},_getPaddingPlusBorderDimensions:function(t){for(var e=0,i=[],s=[t.css("borderTopWidth"),t.css("borderRightWidth"),t.css("borderBottomWidth"),t.css("borderLeftWidth")],n=[t.css("paddingTop"),t.css("paddingRight"),t.css("paddingBottom"),t.css("paddingLeft")];4>e;e++)i[e]=parseFloat(s[e])||0,i[e]+=parseFloat(n[e])||0;return{height:i[0]+i[2],width:i[1]+i[3]}},_proportionallyResize:function(){if(this._proportionallyResizeElements.length)for(var t,e=0,i=this.helper||this.element;this._proportionallyResizeElements.length>e;e++)t=this._proportionallyResizeElements[e],this.outerDimensions||(this.outerDimensions=this._getPaddingPlusBorderDimensions(t)),t.css({height:i.height()-this.outerDimensions.height||0,width:i.width()-this.outerDimensions.width||0})},_renderProxy:function(){var e=this.element,i=this.options;this.elementOffset=e.offset(),this._helper?(this.helper=this.helper||t(""),this._addClass(this.helper,this._helper),this.helper.css({width:this.element.outerWidth(),height:this.element.outerHeight(),position:"absolute",left:this.elementOffset.left+"px",top:this.elementOffset.top+"px",zIndex:++i.zIndex}),this.helper.appendTo("body").disableSelection()):this.helper=this.element
+},_change:{e:function(t,e){return{width:this.originalSize.width+e}},w:function(t,e){var i=this.originalSize,s=this.originalPosition;return{left:s.left+e,width:i.width-e}},n:function(t,e,i){var s=this.originalSize,n=this.originalPosition;return{top:n.top+i,height:s.height-i}},s:function(t,e,i){return{height:this.originalSize.height+i}},se:function(e,i,s){return t.extend(this._change.s.apply(this,arguments),this._change.e.apply(this,[e,i,s]))},sw:function(e,i,s){return t.extend(this._change.s.apply(this,arguments),this._change.w.apply(this,[e,i,s]))},ne:function(e,i,s){return t.extend(this._change.n.apply(this,arguments),this._change.e.apply(this,[e,i,s]))},nw:function(e,i,s){return t.extend(this._change.n.apply(this,arguments),this._change.w.apply(this,[e,i,s]))}},_propagate:function(e,i){t.ui.plugin.call(this,e,[i,this.ui()]),"resize"!==e&&this._trigger(e,i,this.ui())},plugins:{},ui:function(){return{originalElement:this.originalElement,element:this.element,helper:this.helper,position:this.position,size:this.size,originalSize:this.originalSize,originalPosition:this.originalPosition}}}),t.ui.plugin.add("resizable","animate",{stop:function(e){var i=t(this).resizable("instance"),s=i.options,n=i._proportionallyResizeElements,o=n.length&&/textarea/i.test(n[0].nodeName),a=o&&i._hasScroll(n[0],"left")?0:i.sizeDiff.height,r=o?0:i.sizeDiff.width,h={width:i.size.width-r,height:i.size.height-a},l=parseFloat(i.element.css("left"))+(i.position.left-i.originalPosition.left)||null,c=parseFloat(i.element.css("top"))+(i.position.top-i.originalPosition.top)||null;i.element.animate(t.extend(h,c&&l?{top:c,left:l}:{}),{duration:s.animateDuration,easing:s.animateEasing,step:function(){var s={width:parseFloat(i.element.css("width")),height:parseFloat(i.element.css("height")),top:parseFloat(i.element.css("top")),left:parseFloat(i.element.css("left"))};n&&n.length&&t(n[0]).css({width:s.width,height:s.height}),i._updateCache(s),i._propagate("resize",e)}})}}),t.ui.plugin.add("resizable","containment",{start:function(){var e,i,s,n,o,a,r,h=t(this).resizable("instance"),l=h.options,c=h.element,u=l.containment,d=u instanceof t?u.get(0):/parent/.test(u)?c.parent().get(0):u;d&&(h.containerElement=t(d),/document/.test(u)||u===document?(h.containerOffset={left:0,top:0},h.containerPosition={left:0,top:0},h.parentData={element:t(document),left:0,top:0,width:t(document).width(),height:t(document).height()||document.body.parentNode.scrollHeight}):(e=t(d),i=[],t(["Top","Right","Left","Bottom"]).each(function(t,s){i[t]=h._num(e.css("padding"+s))}),h.containerOffset=e.offset(),h.containerPosition=e.position(),h.containerSize={height:e.innerHeight()-i[3],width:e.innerWidth()-i[1]},s=h.containerOffset,n=h.containerSize.height,o=h.containerSize.width,a=h._hasScroll(d,"left")?d.scrollWidth:o,r=h._hasScroll(d)?d.scrollHeight:n,h.parentData={element:d,left:s.left,top:s.top,width:a,height:r}))},resize:function(e){var i,s,n,o,a=t(this).resizable("instance"),r=a.options,h=a.containerOffset,l=a.position,c=a._aspectRatio||e.shiftKey,u={top:0,left:0},d=a.containerElement,p=!0;d[0]!==document&&/static/.test(d.css("position"))&&(u=h),l.left<(a._helper?h.left:0)&&(a.size.width=a.size.width+(a._helper?a.position.left-h.left:a.position.left-u.left),c&&(a.size.height=a.size.width/a.aspectRatio,p=!1),a.position.left=r.helper?h.left:0),l.top<(a._helper?h.top:0)&&(a.size.height=a.size.height+(a._helper?a.position.top-h.top:a.position.top),c&&(a.size.width=a.size.height*a.aspectRatio,p=!1),a.position.top=a._helper?h.top:0),n=a.containerElement.get(0)===a.element.parent().get(0),o=/relative|absolute/.test(a.containerElement.css("position")),n&&o?(a.offset.left=a.parentData.left+a.position.left,a.offset.top=a.parentData.top+a.position.top):(a.offset.left=a.element.offset().left,a.offset.top=a.element.offset().top),i=Math.abs(a.sizeDiff.width+(a._helper?a.offset.left-u.left:a.offset.left-h.left)),s=Math.abs(a.sizeDiff.height+(a._helper?a.offset.top-u.top:a.offset.top-h.top)),i+a.size.width>=a.parentData.width&&(a.size.width=a.parentData.width-i,c&&(a.size.height=a.size.width/a.aspectRatio,p=!1)),s+a.size.height>=a.parentData.height&&(a.size.height=a.parentData.height-s,c&&(a.size.width=a.size.height*a.aspectRatio,p=!1)),p||(a.position.left=a.prevPosition.left,a.position.top=a.prevPosition.top,a.size.width=a.prevSize.width,a.size.height=a.prevSize.height)},stop:function(){var e=t(this).resizable("instance"),i=e.options,s=e.containerOffset,n=e.containerPosition,o=e.containerElement,a=t(e.helper),r=a.offset(),h=a.outerWidth()-e.sizeDiff.width,l=a.outerHeight()-e.sizeDiff.height;e._helper&&!i.animate&&/relative/.test(o.css("position"))&&t(this).css({left:r.left-n.left-s.left,width:h,height:l}),e._helper&&!i.animate&&/static/.test(o.css("position"))&&t(this).css({left:r.left-n.left-s.left,width:h,height:l})}}),t.ui.plugin.add("resizable","alsoResize",{start:function(){var e=t(this).resizable("instance"),i=e.options;t(i.alsoResize).each(function(){var e=t(this);e.data("ui-resizable-alsoresize",{width:parseFloat(e.width()),height:parseFloat(e.height()),left:parseFloat(e.css("left")),top:parseFloat(e.css("top"))})})},resize:function(e,i){var s=t(this).resizable("instance"),n=s.options,o=s.originalSize,a=s.originalPosition,r={height:s.size.height-o.height||0,width:s.size.width-o.width||0,top:s.position.top-a.top||0,left:s.position.left-a.left||0};t(n.alsoResize).each(function(){var e=t(this),s=t(this).data("ui-resizable-alsoresize"),n={},o=e.parents(i.originalElement[0]).length?["width","height"]:["width","height","top","left"];t.each(o,function(t,e){var i=(s[e]||0)+(r[e]||0);i&&i>=0&&(n[e]=i||null)}),e.css(n)})},stop:function(){t(this).removeData("ui-resizable-alsoresize")}}),t.ui.plugin.add("resizable","ghost",{start:function(){var e=t(this).resizable("instance"),i=e.size;e.ghost=e.originalElement.clone(),e.ghost.css({opacity:.25,display:"block",position:"relative",height:i.height,width:i.width,margin:0,left:0,top:0}),e._addClass(e.ghost,"ui-resizable-ghost"),t.uiBackCompat!==!1&&"string"==typeof e.options.ghost&&e.ghost.addClass(this.options.ghost),e.ghost.appendTo(e.helper)},resize:function(){var e=t(this).resizable("instance");e.ghost&&e.ghost.css({position:"relative",height:e.size.height,width:e.size.width})},stop:function(){var e=t(this).resizable("instance");e.ghost&&e.helper&&e.helper.get(0).removeChild(e.ghost.get(0))}}),t.ui.plugin.add("resizable","grid",{resize:function(){var e,i=t(this).resizable("instance"),s=i.options,n=i.size,o=i.originalSize,a=i.originalPosition,r=i.axis,h="number"==typeof s.grid?[s.grid,s.grid]:s.grid,l=h[0]||1,c=h[1]||1,u=Math.round((n.width-o.width)/l)*l,d=Math.round((n.height-o.height)/c)*c,p=o.width+u,f=o.height+d,m=s.maxWidth&&p>s.maxWidth,g=s.maxHeight&&f>s.maxHeight,_=s.minWidth&&s.minWidth>p,v=s.minHeight&&s.minHeight>f;s.grid=h,_&&(p+=l),v&&(f+=c),m&&(p-=l),g&&(f-=c),/^(se|s|e)$/.test(r)?(i.size.width=p,i.size.height=f):/^(ne)$/.test(r)?(i.size.width=p,i.size.height=f,i.position.top=a.top-d):/^(sw)$/.test(r)?(i.size.width=p,i.size.height=f,i.position.left=a.left-u):((0>=f-c||0>=p-l)&&(e=i._getPaddingPlusBorderDimensions(this)),f-c>0?(i.size.height=f,i.position.top=a.top-d):(f=c-e.height,i.size.height=f,i.position.top=a.top+o.height-f),p-l>0?(i.size.width=p,i.position.left=a.left-u):(p=l-e.width,i.size.width=p,i.position.left=a.left+o.width-p))}}),t.ui.resizable});/**
+ * Copyright (c) 2007 Ariel Flesler - aflesler ○ gmail • com | https://github.com/flesler
+ * Licensed under MIT
+ * @author Ariel Flesler
+ * @version 2.1.2
+ */
+;(function(f){"use strict";"function"===typeof define&&define.amd?define(["jquery"],f):"undefined"!==typeof module&&module.exports?module.exports=f(require("jquery")):f(jQuery)})(function($){"use strict";function n(a){return!a.nodeName||-1!==$.inArray(a.nodeName.toLowerCase(),["iframe","#document","html","body"])}function h(a){return $.isFunction(a)||$.isPlainObject(a)?a:{top:a,left:a}}var p=$.scrollTo=function(a,d,b){return $(window).scrollTo(a,d,b)};p.defaults={axis:"xy",duration:0,limit:!0};$.fn.scrollTo=function(a,d,b){"object"=== typeof d&&(b=d,d=0);"function"===typeof b&&(b={onAfter:b});"max"===a&&(a=9E9);b=$.extend({},p.defaults,b);d=d||b.duration;var u=b.queue&&1=f[g]?0:Math.min(f[g],n));!a&&1-1){targetElements.on(evt+EVENT_NAMESPACE,function elementToggle(event){$.powerTip.toggle(this,event)})}else{targetElements.on(evt+EVENT_NAMESPACE,function elementOpen(event){$.powerTip.show(this,event)})}});$.each(options.closeEvents,function(idx,evt){if($.inArray(evt,options.openEvents)<0){targetElements.on(evt+EVENT_NAMESPACE,function elementClose(event){$.powerTip.hide(this,!isMouseEvent(event))})}});targetElements.on("keydown"+EVENT_NAMESPACE,function elementKeyDown(event){if(event.keyCode===27){$.powerTip.hide(this,true)}})}return targetElements};$.fn.powerTip.defaults={fadeInTime:200,fadeOutTime:100,followMouse:false,popupId:"powerTip",popupClass:null,intentSensitivity:7,intentPollInterval:100,closeDelay:100,placement:"n",smartPlacement:false,offset:10,mouseOnToPopup:false,manual:false,openEvents:["mouseenter","focus"],closeEvents:["mouseleave","blur"]};$.fn.powerTip.smartPlacementLists={n:["n","ne","nw","s"],e:["e","ne","se","w","nw","sw","n","s","e"],s:["s","se","sw","n"],w:["w","nw","sw","e","ne","se","n","s","w"],nw:["nw","w","sw","n","s","se","nw"],ne:["ne","e","se","n","s","sw","ne"],sw:["sw","w","nw","s","n","ne","sw"],se:["se","e","ne","s","n","nw","se"],"nw-alt":["nw-alt","n","ne-alt","sw-alt","s","se-alt","w","e"],"ne-alt":["ne-alt","n","nw-alt","se-alt","s","sw-alt","e","w"],"sw-alt":["sw-alt","s","se-alt","nw-alt","n","ne-alt","w","e"],"se-alt":["se-alt","s","sw-alt","ne-alt","n","nw-alt","e","w"]};$.powerTip={show:function apiShowTip(element,event){if(isMouseEvent(event)){trackMouse(event);session.previousX=event.pageX;session.previousY=event.pageY;$(element).data(DATA_DISPLAYCONTROLLER).show()}else{$(element).first().data(DATA_DISPLAYCONTROLLER).show(true,true)}return element},reposition:function apiResetPosition(element){$(element).first().data(DATA_DISPLAYCONTROLLER).resetPosition();return element},hide:function apiCloseTip(element,immediate){var displayController;immediate=element?immediate:true;if(element){displayController=$(element).first().data(DATA_DISPLAYCONTROLLER)}else if(session.activeHover){displayController=session.activeHover.data(DATA_DISPLAYCONTROLLER)}if(displayController){displayController.hide(immediate)}return element},toggle:function apiToggle(element,event){if(session.activeHover&&session.activeHover.is(element)){$.powerTip.hide(element,!isMouseEvent(event))}else{$.powerTip.show(element,event)}return element}};$.powerTip.showTip=$.powerTip.show;$.powerTip.closeTip=$.powerTip.hide;function CSSCoordinates(){var me=this;me.top="auto";me.left="auto";me.right="auto";me.bottom="auto";me.set=function(property,value){if($.isNumeric(value)){me[property]=Math.round(value)}}}function DisplayController(element,options,tipController){var hoverTimer=null,myCloseDelay=null;function openTooltip(immediate,forceOpen){cancelTimer();if(!element.data(DATA_HASACTIVEHOVER)){if(!immediate){session.tipOpenImminent=true;hoverTimer=setTimeout(function intentDelay(){hoverTimer=null;checkForIntent()},options.intentPollInterval)}else{if(forceOpen){element.data(DATA_FORCEDOPEN,true)}closeAnyDelayed();tipController.showTip(element)}}else{cancelClose()}}function closeTooltip(disableDelay){if(myCloseDelay){myCloseDelay=session.closeDelayTimeout=clearTimeout(myCloseDelay);session.delayInProgress=false}cancelTimer();session.tipOpenImminent=false;if(element.data(DATA_HASACTIVEHOVER)){element.data(DATA_FORCEDOPEN,false);if(!disableDelay){session.delayInProgress=true;session.closeDelayTimeout=setTimeout(function closeDelay(){session.closeDelayTimeout=null;tipController.hideTip(element);session.delayInProgress=false;myCloseDelay=null},options.closeDelay);myCloseDelay=session.closeDelayTimeout}else{tipController.hideTip(element)}}}function checkForIntent(){var xDifference=Math.abs(session.previousX-session.currentX),yDifference=Math.abs(session.previousY-session.currentY),totalDifference=xDifference+yDifference;if(totalDifference",{id:options.popupId});if($body.length===0){$body=$("body")}$body.append(tipElement);session.tooltips=session.tooltips?session.tooltips.add(tipElement):tipElement}if(options.followMouse){if(!tipElement.data(DATA_HASMOUSEMOVE)){$document.on("mousemove"+EVENT_NAMESPACE,positionTipOnCursor);$window.on("scroll"+EVENT_NAMESPACE,positionTipOnCursor);tipElement.data(DATA_HASMOUSEMOVE,true)}}function beginShowTip(element){element.data(DATA_HASACTIVEHOVER,true);tipElement.queue(function queueTipInit(next){showTip(element);next()})}function showTip(element){var tipContent;if(!element.data(DATA_HASACTIVEHOVER)){return}if(session.isTipOpen){if(!session.isClosing){hideTip(session.activeHover)}tipElement.delay(100).queue(function queueTipAgain(next){showTip(element);next()});return}element.trigger("powerTipPreRender");tipContent=getTooltipContent(element);if(tipContent){tipElement.empty().append(tipContent)}else{return}element.trigger("powerTipRender");session.activeHover=element;session.isTipOpen=true;tipElement.data(DATA_MOUSEONTOTIP,options.mouseOnToPopup);tipElement.addClass(options.popupClass);if(!options.followMouse||element.data(DATA_FORCEDOPEN)){positionTipOnElement(element);session.isFixedTipOpen=true}else{positionTipOnCursor()}if(!element.data(DATA_FORCEDOPEN)&&!options.followMouse){$document.on("click"+EVENT_NAMESPACE,function documentClick(event){var target=event.target;if(target!==element[0]){if(options.mouseOnToPopup){if(target!==tipElement[0]&&!$.contains(tipElement[0],target)){$.powerTip.hide()}}else{$.powerTip.hide()}}})}if(options.mouseOnToPopup&&!options.manual){tipElement.on("mouseenter"+EVENT_NAMESPACE,function tipMouseEnter(){if(session.activeHover){session.activeHover.data(DATA_DISPLAYCONTROLLER).cancel()}});tipElement.on("mouseleave"+EVENT_NAMESPACE,function tipMouseLeave(){if(session.activeHover){session.activeHover.data(DATA_DISPLAYCONTROLLER).hide()}})}tipElement.fadeIn(options.fadeInTime,function fadeInCallback(){if(!session.desyncTimeout){session.desyncTimeout=setInterval(closeDesyncedTip,500)}element.trigger("powerTipOpen")})}function hideTip(element){session.isClosing=true;session.isTipOpen=false;session.desyncTimeout=clearInterval(session.desyncTimeout);element.data(DATA_HASACTIVEHOVER,false);element.data(DATA_FORCEDOPEN,false);$document.off("click"+EVENT_NAMESPACE);tipElement.off(EVENT_NAMESPACE);tipElement.fadeOut(options.fadeOutTime,function fadeOutCallback(){var coords=new CSSCoordinates;session.activeHover=null;session.isClosing=false;session.isFixedTipOpen=false;tipElement.removeClass();coords.set("top",session.currentY+options.offset);coords.set("left",session.currentX+options.offset);tipElement.css(coords);element.trigger("powerTipClose")})}function positionTipOnCursor(){var tipWidth,tipHeight,coords,collisions,collisionCount;if(!session.isFixedTipOpen&&(session.isTipOpen||session.tipOpenImminent&&tipElement.data(DATA_HASMOUSEMOVE))){tipWidth=tipElement.outerWidth();tipHeight=tipElement.outerHeight();coords=new CSSCoordinates;coords.set("top",session.currentY+options.offset);coords.set("left",session.currentX+options.offset);collisions=getViewportCollisions(coords,tipWidth,tipHeight);if(collisions!==Collision.none){collisionCount=countFlags(collisions);if(collisionCount===1){if(collisions===Collision.right){coords.set("left",session.scrollLeft+session.windowWidth-tipWidth)}else if(collisions===Collision.bottom){coords.set("top",session.scrollTop+session.windowHeight-tipHeight)}}else{coords.set("left",session.currentX-tipWidth-options.offset);coords.set("top",session.currentY-tipHeight-options.offset)}}tipElement.css(coords)}}function positionTipOnElement(element){var priorityList,finalPlacement;if(options.smartPlacement||options.followMouse&&element.data(DATA_FORCEDOPEN)){priorityList=$.fn.powerTip.smartPlacementLists[options.placement];$.each(priorityList,function(idx,pos){var collisions=getViewportCollisions(placeTooltip(element,pos),tipElement.outerWidth(),tipElement.outerHeight());finalPlacement=pos;return collisions!==Collision.none})}else{placeTooltip(element,options.placement);finalPlacement=options.placement}tipElement.removeClass("w nw sw e ne se n s w se-alt sw-alt ne-alt nw-alt");tipElement.addClass(finalPlacement)}function placeTooltip(element,placement){var iterationCount=0,tipWidth,tipHeight,coords=new CSSCoordinates;coords.set("top",0);coords.set("left",0);tipElement.css(coords);do{tipWidth=tipElement.outerWidth();tipHeight=tipElement.outerHeight();coords=placementCalculator.compute(element,placement,tipWidth,tipHeight,options.offset);tipElement.css(coords)}while(++iterationCount<=5&&(tipWidth!==tipElement.outerWidth()||tipHeight!==tipElement.outerHeight()));return coords}function closeDesyncedTip(){var isDesynced=false,hasDesyncableCloseEvent=$.grep(["mouseleave","mouseout","blur","focusout"],function(eventType){return $.inArray(eventType,options.closeEvents)!==-1}).length>0;if(session.isTipOpen&&!session.isClosing&&!session.delayInProgress&&hasDesyncableCloseEvent){if(session.activeHover.data(DATA_HASACTIVEHOVER)===false||session.activeHover.is(":disabled")){isDesynced=true}else if(!isMouseOver(session.activeHover)&&!session.activeHover.is(":focus")&&!session.activeHover.data(DATA_FORCEDOPEN)){if(tipElement.data(DATA_MOUSEONTOTIP)){if(!isMouseOver(tipElement)){isDesynced=true}}else{isDesynced=true}}if(isDesynced){hideTip(session.activeHover)}}}this.showTip=beginShowTip;this.hideTip=hideTip;this.resetPosition=positionTipOnElement}function isSvgElement(element){return Boolean(window.SVGElement&&element[0]instanceof SVGElement)}function isMouseEvent(event){return Boolean(event&&$.inArray(event.type,MOUSE_EVENTS)>-1&&typeof event.pageX==="number")}function initTracking(){if(!session.mouseTrackingActive){session.mouseTrackingActive=true;getViewportDimensions();$(getViewportDimensions);$document.on("mousemove"+EVENT_NAMESPACE,trackMouse);$window.on("resize"+EVENT_NAMESPACE,trackResize);$window.on("scroll"+EVENT_NAMESPACE,trackScroll)}}function getViewportDimensions(){session.scrollLeft=$window.scrollLeft();session.scrollTop=$window.scrollTop();session.windowWidth=$window.width();session.windowHeight=$window.height()}function trackResize(){session.windowWidth=$window.width();session.windowHeight=$window.height()}function trackScroll(){var x=$window.scrollLeft(),y=$window.scrollTop();if(x!==session.scrollLeft){session.currentX+=x-session.scrollLeft;session.scrollLeft=x}if(y!==session.scrollTop){session.currentY+=y-session.scrollTop;session.scrollTop=y}}function trackMouse(event){session.currentX=event.pageX;session.currentY=event.pageY}function isMouseOver(element){var elementPosition=element.offset(),elementBox=element[0].getBoundingClientRect(),elementWidth=elementBox.right-elementBox.left,elementHeight=elementBox.bottom-elementBox.top;return session.currentX>=elementPosition.left&&session.currentX<=elementPosition.left+elementWidth&&session.currentY>=elementPosition.top&&session.currentY<=elementPosition.top+elementHeight}function getTooltipContent(element){var tipText=element.data(DATA_POWERTIP),tipObject=element.data(DATA_POWERTIPJQ),tipTarget=element.data(DATA_POWERTIPTARGET),targetElement,content;if(tipText){if($.isFunction(tipText)){tipText=tipText.call(element[0])}content=tipText}else if(tipObject){if($.isFunction(tipObject)){tipObject=tipObject.call(element[0])}if(tipObject.length>0){content=tipObject.clone(true,true)}}else if(tipTarget){targetElement=$("#"+tipTarget);if(targetElement.length>0){content=targetElement.html()}}return content}function getViewportCollisions(coords,elementWidth,elementHeight){var viewportTop=session.scrollTop,viewportLeft=session.scrollLeft,viewportBottom=viewportTop+session.windowHeight,viewportRight=viewportLeft+session.windowWidth,collisions=Collision.none;if(coords.topviewportBottom||Math.abs(coords.bottom-session.windowHeight)>viewportBottom){collisions|=Collision.bottom}if(coords.leftviewportRight){collisions|=Collision.left}if(coords.left+elementWidth>viewportRight||coords.right1)){a.preventDefault();var c=a.originalEvent.changedTouches[0],d=document.createEvent("MouseEvents");d.initMouseEvent(b,!0,!0,window,1,c.screenX,c.screenY,c.clientX,c.clientY,!1,!1,!1,!1,0,null),a.target.dispatchEvent(d)}}if(a.support.touch="ontouchend"in document,a.support.touch){var e,b=a.ui.mouse.prototype,c=b._mouseInit,d=b._mouseDestroy;b._touchStart=function(a){var b=this;!e&&b._mouseCapture(a.originalEvent.changedTouches[0])&&(e=!0,b._touchMoved=!1,f(a,"mouseover"),f(a,"mousemove"),f(a,"mousedown"))},b._touchMove=function(a){e&&(this._touchMoved=!0,f(a,"mousemove"))},b._touchEnd=function(a){e&&(f(a,"mouseup"),f(a,"mouseout"),this._touchMoved||f(a,"click"),e=!1)},b._mouseInit=function(){var b=this;b.element.bind({touchstart:a.proxy(b,"_touchStart"),touchmove:a.proxy(b,"_touchMove"),touchend:a.proxy(b,"_touchEnd")}),c.call(b)},b._mouseDestroy=function(){var b=this;b.element.unbind({touchstart:a.proxy(b,"_touchStart"),touchmove:a.proxy(b,"_touchMove"),touchend:a.proxy(b,"_touchEnd")}),d.call(b)}}}(jQuery);/*! SmartMenus jQuery Plugin - v1.1.0 - September 17, 2017
+ * http://www.smartmenus.org/
+ * Copyright Vasil Dinkov, Vadikom Web Ltd. http://vadikom.com; Licensed MIT */(function(t){"function"==typeof define&&define.amd?define(["jquery"],t):"object"==typeof module&&"object"==typeof module.exports?module.exports=t(require("jquery")):t(jQuery)})(function($){function initMouseDetection(t){var e=".smartmenus_mouse";if(mouseDetectionEnabled||t)mouseDetectionEnabled&&t&&($(document).off(e),mouseDetectionEnabled=!1);else{var i=!0,s=null,o={mousemove:function(t){var e={x:t.pageX,y:t.pageY,timeStamp:(new Date).getTime()};if(s){var o=Math.abs(s.x-e.x),a=Math.abs(s.y-e.y);if((o>0||a>0)&&2>=o&&2>=a&&300>=e.timeStamp-s.timeStamp&&(mouse=!0,i)){var n=$(t.target).closest("a");n.is("a")&&$.each(menuTrees,function(){return $.contains(this.$root[0],n[0])?(this.itemEnter({currentTarget:n[0]}),!1):void 0}),i=!1}}s=e}};o[touchEvents?"touchstart":"pointerover pointermove pointerout MSPointerOver MSPointerMove MSPointerOut"]=function(t){isTouchEvent(t.originalEvent)&&(mouse=!1)},$(document).on(getEventsNS(o,e)),mouseDetectionEnabled=!0}}function isTouchEvent(t){return!/^(4|mouse)$/.test(t.pointerType)}function getEventsNS(t,e){e||(e="");var i={};for(var s in t)i[s.split(" ").join(e+" ")+e]=t[s];return i}var menuTrees=[],mouse=!1,touchEvents="ontouchstart"in window,mouseDetectionEnabled=!1,requestAnimationFrame=window.requestAnimationFrame||function(t){return setTimeout(t,1e3/60)},cancelAnimationFrame=window.cancelAnimationFrame||function(t){clearTimeout(t)},canAnimate=!!$.fn.animate;return $.SmartMenus=function(t,e){this.$root=$(t),this.opts=e,this.rootId="",this.accessIdPrefix="",this.$subArrow=null,this.activatedItems=[],this.visibleSubMenus=[],this.showTimeout=0,this.hideTimeout=0,this.scrollTimeout=0,this.clickActivated=!1,this.focusActivated=!1,this.zIndexInc=0,this.idInc=0,this.$firstLink=null,this.$firstSub=null,this.disabled=!1,this.$disableOverlay=null,this.$touchScrollingSub=null,this.cssTransforms3d="perspective"in t.style||"webkitPerspective"in t.style,this.wasCollapsible=!1,this.init()},$.extend($.SmartMenus,{hideAll:function(){$.each(menuTrees,function(){this.menuHideAll()})},destroy:function(){for(;menuTrees.length;)menuTrees[0].destroy();initMouseDetection(!0)},prototype:{init:function(t){var e=this;if(!t){menuTrees.push(this),this.rootId=((new Date).getTime()+Math.random()+"").replace(/\D/g,""),this.accessIdPrefix="sm-"+this.rootId+"-",this.$root.hasClass("sm-rtl")&&(this.opts.rightToLeftSubMenus=!0);var i=".smartmenus";this.$root.data("smartmenus",this).attr("data-smartmenus-id",this.rootId).dataSM("level",1).on(getEventsNS({"mouseover focusin":$.proxy(this.rootOver,this),"mouseout focusout":$.proxy(this.rootOut,this),keydown:$.proxy(this.rootKeyDown,this)},i)).on(getEventsNS({mouseenter:$.proxy(this.itemEnter,this),mouseleave:$.proxy(this.itemLeave,this),mousedown:$.proxy(this.itemDown,this),focus:$.proxy(this.itemFocus,this),blur:$.proxy(this.itemBlur,this),click:$.proxy(this.itemClick,this)},i),"a"),i+=this.rootId,this.opts.hideOnClick&&$(document).on(getEventsNS({touchstart:$.proxy(this.docTouchStart,this),touchmove:$.proxy(this.docTouchMove,this),touchend:$.proxy(this.docTouchEnd,this),click:$.proxy(this.docClick,this)},i)),$(window).on(getEventsNS({"resize orientationchange":$.proxy(this.winResize,this)},i)),this.opts.subIndicators&&(this.$subArrow=$("").addClass("sub-arrow"),this.opts.subIndicatorsText&&this.$subArrow.html(this.opts.subIndicatorsText)),initMouseDetection()}if(this.$firstSub=this.$root.find("ul").each(function(){e.menuInit($(this))}).eq(0),this.$firstLink=this.$root.find("a").eq(0),this.opts.markCurrentItem){var s=/(index|default)\.[^#\?\/]*/i,o=/#.*/,a=window.location.href.replace(s,""),n=a.replace(o,"");this.$root.find("a").each(function(){var t=this.href.replace(s,""),i=$(this);(t==a||t==n)&&(i.addClass("current"),e.opts.markCurrentTree&&i.parentsUntil("[data-smartmenus-id]","ul").each(function(){$(this).dataSM("parent-a").addClass("current")}))})}this.wasCollapsible=this.isCollapsible()},destroy:function(t){if(!t){var e=".smartmenus";this.$root.removeData("smartmenus").removeAttr("data-smartmenus-id").removeDataSM("level").off(e),e+=this.rootId,$(document).off(e),$(window).off(e),this.opts.subIndicators&&(this.$subArrow=null)}this.menuHideAll();var i=this;this.$root.find("ul").each(function(){var t=$(this);t.dataSM("scroll-arrows")&&t.dataSM("scroll-arrows").remove(),t.dataSM("shown-before")&&((i.opts.subMenusMinWidth||i.opts.subMenusMaxWidth)&&t.css({width:"",minWidth:"",maxWidth:""}).removeClass("sm-nowrap"),t.dataSM("scroll-arrows")&&t.dataSM("scroll-arrows").remove(),t.css({zIndex:"",top:"",left:"",marginLeft:"",marginTop:"",display:""})),0==(t.attr("id")||"").indexOf(i.accessIdPrefix)&&t.removeAttr("id")}).removeDataSM("in-mega").removeDataSM("shown-before").removeDataSM("scroll-arrows").removeDataSM("parent-a").removeDataSM("level").removeDataSM("beforefirstshowfired").removeAttr("role").removeAttr("aria-hidden").removeAttr("aria-labelledby").removeAttr("aria-expanded"),this.$root.find("a.has-submenu").each(function(){var t=$(this);0==t.attr("id").indexOf(i.accessIdPrefix)&&t.removeAttr("id")}).removeClass("has-submenu").removeDataSM("sub").removeAttr("aria-haspopup").removeAttr("aria-controls").removeAttr("aria-expanded").closest("li").removeDataSM("sub"),this.opts.subIndicators&&this.$root.find("span.sub-arrow").remove(),this.opts.markCurrentItem&&this.$root.find("a.current").removeClass("current"),t||(this.$root=null,this.$firstLink=null,this.$firstSub=null,this.$disableOverlay&&(this.$disableOverlay.remove(),this.$disableOverlay=null),menuTrees.splice($.inArray(this,menuTrees),1))},disable:function(t){if(!this.disabled){if(this.menuHideAll(),!t&&!this.opts.isPopup&&this.$root.is(":visible")){var e=this.$root.offset();this.$disableOverlay=$('').css({position:"absolute",top:e.top,left:e.left,width:this.$root.outerWidth(),height:this.$root.outerHeight(),zIndex:this.getStartZIndex(!0),opacity:0}).appendTo(document.body)}this.disabled=!0}},docClick:function(t){return this.$touchScrollingSub?(this.$touchScrollingSub=null,void 0):((this.visibleSubMenus.length&&!$.contains(this.$root[0],t.target)||$(t.target).closest("a").length)&&this.menuHideAll(),void 0)},docTouchEnd:function(){if(this.lastTouch){if(!(!this.visibleSubMenus.length||void 0!==this.lastTouch.x2&&this.lastTouch.x1!=this.lastTouch.x2||void 0!==this.lastTouch.y2&&this.lastTouch.y1!=this.lastTouch.y2||this.lastTouch.target&&$.contains(this.$root[0],this.lastTouch.target))){this.hideTimeout&&(clearTimeout(this.hideTimeout),this.hideTimeout=0);var t=this;this.hideTimeout=setTimeout(function(){t.menuHideAll()},350)}this.lastTouch=null}},docTouchMove:function(t){if(this.lastTouch){var e=t.originalEvent.touches[0];this.lastTouch.x2=e.pageX,this.lastTouch.y2=e.pageY}},docTouchStart:function(t){var e=t.originalEvent.touches[0];this.lastTouch={x1:e.pageX,y1:e.pageY,target:e.target}},enable:function(){this.disabled&&(this.$disableOverlay&&(this.$disableOverlay.remove(),this.$disableOverlay=null),this.disabled=!1)},getClosestMenu:function(t){for(var e=$(t).closest("ul");e.dataSM("in-mega");)e=e.parent().closest("ul");return e[0]||null},getHeight:function(t){return this.getOffset(t,!0)},getOffset:function(t,e){var i;"none"==t.css("display")&&(i={position:t[0].style.position,visibility:t[0].style.visibility},t.css({position:"absolute",visibility:"hidden"}).show());var s=t[0].getBoundingClientRect&&t[0].getBoundingClientRect(),o=s&&(e?s.height||s.bottom-s.top:s.width||s.right-s.left);return o||0===o||(o=e?t[0].offsetHeight:t[0].offsetWidth),i&&t.hide().css(i),o},getStartZIndex:function(t){var e=parseInt(this[t?"$root":"$firstSub"].css("z-index"));return!t&&isNaN(e)&&(e=parseInt(this.$root.css("z-index"))),isNaN(e)?1:e},getTouchPoint:function(t){return t.touches&&t.touches[0]||t.changedTouches&&t.changedTouches[0]||t},getViewport:function(t){var e=t?"Height":"Width",i=document.documentElement["client"+e],s=window["inner"+e];return s&&(i=Math.min(i,s)),i},getViewportHeight:function(){return this.getViewport(!0)},getViewportWidth:function(){return this.getViewport()},getWidth:function(t){return this.getOffset(t)},handleEvents:function(){return!this.disabled&&this.isCSSOn()},handleItemEvents:function(t){return this.handleEvents()&&!this.isLinkInMegaMenu(t)},isCollapsible:function(){return"static"==this.$firstSub.css("position")},isCSSOn:function(){return"inline"!=this.$firstLink.css("display")},isFixed:function(){var t="fixed"==this.$root.css("position");return t||this.$root.parentsUntil("body").each(function(){return"fixed"==$(this).css("position")?(t=!0,!1):void 0}),t},isLinkInMegaMenu:function(t){return $(this.getClosestMenu(t[0])).hasClass("mega-menu")},isTouchMode:function(){return!mouse||this.opts.noMouseOver||this.isCollapsible()},itemActivate:function(t,e){var i=t.closest("ul"),s=i.dataSM("level");if(s>1&&(!this.activatedItems[s-2]||this.activatedItems[s-2][0]!=i.dataSM("parent-a")[0])){var o=this;$(i.parentsUntil("[data-smartmenus-id]","ul").get().reverse()).add(i).each(function(){o.itemActivate($(this).dataSM("parent-a"))})}if((!this.isCollapsible()||e)&&this.menuHideSubMenus(this.activatedItems[s-1]&&this.activatedItems[s-1][0]==t[0]?s:s-1),this.activatedItems[s-1]=t,this.$root.triggerHandler("activate.smapi",t[0])!==!1){var a=t.dataSM("sub");a&&(this.isTouchMode()||!this.opts.showOnClick||this.clickActivated)&&this.menuShow(a)}},itemBlur:function(t){var e=$(t.currentTarget);this.handleItemEvents(e)&&this.$root.triggerHandler("blur.smapi",e[0])},itemClick:function(t){var e=$(t.currentTarget);if(this.handleItemEvents(e)){if(this.$touchScrollingSub&&this.$touchScrollingSub[0]==e.closest("ul")[0])return this.$touchScrollingSub=null,t.stopPropagation(),!1;if(this.$root.triggerHandler("click.smapi",e[0])===!1)return!1;var i=$(t.target).is(".sub-arrow"),s=e.dataSM("sub"),o=s?2==s.dataSM("level"):!1,a=this.isCollapsible(),n=/toggle$/.test(this.opts.collapsibleBehavior),r=/link$/.test(this.opts.collapsibleBehavior),h=/^accordion/.test(this.opts.collapsibleBehavior);if(s&&!s.is(":visible")){if((!r||!a||i)&&(this.opts.showOnClick&&o&&(this.clickActivated=!0),this.itemActivate(e,h),s.is(":visible")))return this.focusActivated=!0,!1}else if(a&&(n||i))return this.itemActivate(e,h),this.menuHide(s),n&&(this.focusActivated=!1),!1;return this.opts.showOnClick&&o||e.hasClass("disabled")||this.$root.triggerHandler("select.smapi",e[0])===!1?!1:void 0}},itemDown:function(t){var e=$(t.currentTarget);this.handleItemEvents(e)&&e.dataSM("mousedown",!0)},itemEnter:function(t){var e=$(t.currentTarget);if(this.handleItemEvents(e)){if(!this.isTouchMode()){this.showTimeout&&(clearTimeout(this.showTimeout),this.showTimeout=0);var i=this;this.showTimeout=setTimeout(function(){i.itemActivate(e)},this.opts.showOnClick&&1==e.closest("ul").dataSM("level")?1:this.opts.showTimeout)}this.$root.triggerHandler("mouseenter.smapi",e[0])}},itemFocus:function(t){var e=$(t.currentTarget);this.handleItemEvents(e)&&(!this.focusActivated||this.isTouchMode()&&e.dataSM("mousedown")||this.activatedItems.length&&this.activatedItems[this.activatedItems.length-1][0]==e[0]||this.itemActivate(e,!0),this.$root.triggerHandler("focus.smapi",e[0]))},itemLeave:function(t){var e=$(t.currentTarget);this.handleItemEvents(e)&&(this.isTouchMode()||(e[0].blur(),this.showTimeout&&(clearTimeout(this.showTimeout),this.showTimeout=0)),e.removeDataSM("mousedown"),this.$root.triggerHandler("mouseleave.smapi",e[0]))},menuHide:function(t){if(this.$root.triggerHandler("beforehide.smapi",t[0])!==!1&&(canAnimate&&t.stop(!0,!0),"none"!=t.css("display"))){var e=function(){t.css("z-index","")};this.isCollapsible()?canAnimate&&this.opts.collapsibleHideFunction?this.opts.collapsibleHideFunction.call(this,t,e):t.hide(this.opts.collapsibleHideDuration,e):canAnimate&&this.opts.hideFunction?this.opts.hideFunction.call(this,t,e):t.hide(this.opts.hideDuration,e),t.dataSM("scroll")&&(this.menuScrollStop(t),t.css({"touch-action":"","-ms-touch-action":"","-webkit-transform":"",transform:""}).off(".smartmenus_scroll").removeDataSM("scroll").dataSM("scroll-arrows").hide()),t.dataSM("parent-a").removeClass("highlighted").attr("aria-expanded","false"),t.attr({"aria-expanded":"false","aria-hidden":"true"});var i=t.dataSM("level");this.activatedItems.splice(i-1,1),this.visibleSubMenus.splice($.inArray(t,this.visibleSubMenus),1),this.$root.triggerHandler("hide.smapi",t[0])}},menuHideAll:function(){this.showTimeout&&(clearTimeout(this.showTimeout),this.showTimeout=0);for(var t=this.opts.isPopup?1:0,e=this.visibleSubMenus.length-1;e>=t;e--)this.menuHide(this.visibleSubMenus[e]);this.opts.isPopup&&(canAnimate&&this.$root.stop(!0,!0),this.$root.is(":visible")&&(canAnimate&&this.opts.hideFunction?this.opts.hideFunction.call(this,this.$root):this.$root.hide(this.opts.hideDuration))),this.activatedItems=[],this.visibleSubMenus=[],this.clickActivated=!1,this.focusActivated=!1,this.zIndexInc=0,this.$root.triggerHandler("hideAll.smapi")},menuHideSubMenus:function(t){for(var e=this.activatedItems.length-1;e>=t;e--){var i=this.activatedItems[e].dataSM("sub");i&&this.menuHide(i)}},menuInit:function(t){if(!t.dataSM("in-mega")){t.hasClass("mega-menu")&&t.find("ul").dataSM("in-mega",!0);for(var e=2,i=t[0];(i=i.parentNode.parentNode)!=this.$root[0];)e++;var s=t.prevAll("a").eq(-1);s.length||(s=t.prevAll().find("a").eq(-1)),s.addClass("has-submenu").dataSM("sub",t),t.dataSM("parent-a",s).dataSM("level",e).parent().dataSM("sub",t);var o=s.attr("id")||this.accessIdPrefix+ ++this.idInc,a=t.attr("id")||this.accessIdPrefix+ ++this.idInc;s.attr({id:o,"aria-haspopup":"true","aria-controls":a,"aria-expanded":"false"}),t.attr({id:a,role:"group","aria-hidden":"true","aria-labelledby":o,"aria-expanded":"false"}),this.opts.subIndicators&&s[this.opts.subIndicatorsPos](this.$subArrow.clone())}},menuPosition:function(t){var e,i,s=t.dataSM("parent-a"),o=s.closest("li"),a=o.parent(),n=t.dataSM("level"),r=this.getWidth(t),h=this.getHeight(t),u=s.offset(),l=u.left,c=u.top,d=this.getWidth(s),m=this.getHeight(s),p=$(window),f=p.scrollLeft(),v=p.scrollTop(),b=this.getViewportWidth(),S=this.getViewportHeight(),g=a.parent().is("[data-sm-horizontal-sub]")||2==n&&!a.hasClass("sm-vertical"),M=this.opts.rightToLeftSubMenus&&!o.is("[data-sm-reverse]")||!this.opts.rightToLeftSubMenus&&o.is("[data-sm-reverse]"),w=2==n?this.opts.mainMenuSubOffsetX:this.opts.subMenusSubOffsetX,T=2==n?this.opts.mainMenuSubOffsetY:this.opts.subMenusSubOffsetY;if(g?(e=M?d-r-w:w,i=this.opts.bottomToTopSubMenus?-h-T:m+T):(e=M?w-r:d-w,i=this.opts.bottomToTopSubMenus?m-T-h:T),this.opts.keepInViewport){var y=l+e,I=c+i;if(M&&f>y?e=g?f-y+e:d-w:!M&&y+r>f+b&&(e=g?f+b-r-y+e:w-r),g||(S>h&&I+h>v+S?i+=v+S-h-I:(h>=S||v>I)&&(i+=v-I)),g&&(I+h>v+S+.49||v>I)||!g&&h>S+.49){var x=this;t.dataSM("scroll-arrows")||t.dataSM("scroll-arrows",$([$('')[0],$('')[0]]).on({mouseenter:function(){t.dataSM("scroll").up=$(this).hasClass("scroll-up"),x.menuScroll(t)},mouseleave:function(e){x.menuScrollStop(t),x.menuScrollOut(t,e)},"mousewheel DOMMouseScroll":function(t){t.preventDefault()}}).insertAfter(t));var A=".smartmenus_scroll";if(t.dataSM("scroll",{y:this.cssTransforms3d?0:i-m,step:1,itemH:m,subH:h,arrowDownH:this.getHeight(t.dataSM("scroll-arrows").eq(1))}).on(getEventsNS({mouseover:function(e){x.menuScrollOver(t,e)},mouseout:function(e){x.menuScrollOut(t,e)},"mousewheel DOMMouseScroll":function(e){x.menuScrollMousewheel(t,e)}},A)).dataSM("scroll-arrows").css({top:"auto",left:"0",marginLeft:e+(parseInt(t.css("border-left-width"))||0),width:r-(parseInt(t.css("border-left-width"))||0)-(parseInt(t.css("border-right-width"))||0),zIndex:t.css("z-index")}).eq(g&&this.opts.bottomToTopSubMenus?0:1).show(),this.isFixed()){var C={};C[touchEvents?"touchstart touchmove touchend":"pointerdown pointermove pointerup MSPointerDown MSPointerMove MSPointerUp"]=function(e){x.menuScrollTouch(t,e)},t.css({"touch-action":"none","-ms-touch-action":"none"}).on(getEventsNS(C,A))}}}t.css({top:"auto",left:"0",marginLeft:e,marginTop:i-m})},menuScroll:function(t,e,i){var s,o=t.dataSM("scroll"),a=t.dataSM("scroll-arrows"),n=o.up?o.upEnd:o.downEnd;if(!e&&o.momentum){if(o.momentum*=.92,s=o.momentum,.5>s)return this.menuScrollStop(t),void 0}else s=i||(e||!this.opts.scrollAccelerate?this.opts.scrollStep:Math.floor(o.step));var r=t.dataSM("level");if(this.activatedItems[r-1]&&this.activatedItems[r-1].dataSM("sub")&&this.activatedItems[r-1].dataSM("sub").is(":visible")&&this.menuHideSubMenus(r-1),o.y=o.up&&o.y>=n||!o.up&&n>=o.y?o.y:Math.abs(n-o.y)>s?o.y+(o.up?s:-s):n,t.css(this.cssTransforms3d?{"-webkit-transform":"translate3d(0, "+o.y+"px, 0)",transform:"translate3d(0, "+o.y+"px, 0)"}:{marginTop:o.y}),mouse&&(o.up&&o.y>o.downEnd||!o.up&&o.y0;t.dataSM("scroll-arrows").eq(i?0:1).is(":visible")&&(t.dataSM("scroll").up=i,this.menuScroll(t,!0))}e.preventDefault()},menuScrollOut:function(t,e){mouse&&(/^scroll-(up|down)/.test((e.relatedTarget||"").className)||(t[0]==e.relatedTarget||$.contains(t[0],e.relatedTarget))&&this.getClosestMenu(e.relatedTarget)==t[0]||t.dataSM("scroll-arrows").css("visibility","hidden"))},menuScrollOver:function(t,e){if(mouse&&!/^scroll-(up|down)/.test(e.target.className)&&this.getClosestMenu(e.target)==t[0]){this.menuScrollRefreshData(t);var i=t.dataSM("scroll"),s=$(window).scrollTop()-t.dataSM("parent-a").offset().top-i.itemH;t.dataSM("scroll-arrows").eq(0).css("margin-top",s).end().eq(1).css("margin-top",s+this.getViewportHeight()-i.arrowDownH).end().css("visibility","visible")}},menuScrollRefreshData:function(t){var e=t.dataSM("scroll"),i=$(window).scrollTop()-t.dataSM("parent-a").offset().top-e.itemH;this.cssTransforms3d&&(i=-(parseFloat(t.css("margin-top"))-i)),$.extend(e,{upEnd:i,downEnd:i+this.getViewportHeight()-e.subH})},menuScrollStop:function(t){return this.scrollTimeout?(cancelAnimationFrame(this.scrollTimeout),this.scrollTimeout=0,t.dataSM("scroll").step=1,!0):void 0},menuScrollTouch:function(t,e){if(e=e.originalEvent,isTouchEvent(e)){var i=this.getTouchPoint(e);if(this.getClosestMenu(i.target)==t[0]){var s=t.dataSM("scroll");if(/(start|down)$/i.test(e.type))this.menuScrollStop(t)?(e.preventDefault(),this.$touchScrollingSub=t):this.$touchScrollingSub=null,this.menuScrollRefreshData(t),$.extend(s,{touchStartY:i.pageY,touchStartTime:e.timeStamp});else if(/move$/i.test(e.type)){var o=void 0!==s.touchY?s.touchY:s.touchStartY;if(void 0!==o&&o!=i.pageY){this.$touchScrollingSub=t;var a=i.pageY>o;void 0!==s.up&&s.up!=a&&$.extend(s,{touchStartY:i.pageY,touchStartTime:e.timeStamp}),$.extend(s,{up:a,touchY:i.pageY}),this.menuScroll(t,!0,Math.abs(i.pageY-o))}e.preventDefault()}else void 0!==s.touchY&&((s.momentum=15*Math.pow(Math.abs(i.pageY-s.touchStartY)/(e.timeStamp-s.touchStartTime),2))&&(this.menuScrollStop(t),this.menuScroll(t),e.preventDefault()),delete s.touchY)}}},menuShow:function(t){if((t.dataSM("beforefirstshowfired")||(t.dataSM("beforefirstshowfired",!0),this.$root.triggerHandler("beforefirstshow.smapi",t[0])!==!1))&&this.$root.triggerHandler("beforeshow.smapi",t[0])!==!1&&(t.dataSM("shown-before",!0),canAnimate&&t.stop(!0,!0),!t.is(":visible"))){var e=t.dataSM("parent-a"),i=this.isCollapsible();if((this.opts.keepHighlighted||i)&&e.addClass("highlighted"),i)t.removeClass("sm-nowrap").css({zIndex:"",width:"auto",minWidth:"",maxWidth:"",top:"",left:"",marginLeft:"",marginTop:""});else{if(t.css("z-index",this.zIndexInc=(this.zIndexInc||this.getStartZIndex())+1),(this.opts.subMenusMinWidth||this.opts.subMenusMaxWidth)&&(t.css({width:"auto",minWidth:"",maxWidth:""}).addClass("sm-nowrap"),this.opts.subMenusMinWidth&&t.css("min-width",this.opts.subMenusMinWidth),this.opts.subMenusMaxWidth)){var s=this.getWidth(t);t.css("max-width",this.opts.subMenusMaxWidth),s>this.getWidth(t)&&t.removeClass("sm-nowrap").css("width",this.opts.subMenusMaxWidth)}this.menuPosition(t)}var o=function(){t.css("overflow","")};i?canAnimate&&this.opts.collapsibleShowFunction?this.opts.collapsibleShowFunction.call(this,t,o):t.show(this.opts.collapsibleShowDuration,o):canAnimate&&this.opts.showFunction?this.opts.showFunction.call(this,t,o):t.show(this.opts.showDuration,o),e.attr("aria-expanded","true"),t.attr({"aria-expanded":"true","aria-hidden":"false"}),this.visibleSubMenus.push(t),this.$root.triggerHandler("show.smapi",t[0])}},popupHide:function(t){this.hideTimeout&&(clearTimeout(this.hideTimeout),this.hideTimeout=0);var e=this;this.hideTimeout=setTimeout(function(){e.menuHideAll()},t?1:this.opts.hideTimeout)},popupShow:function(t,e){if(!this.opts.isPopup)return alert('SmartMenus jQuery Error:\n\nIf you want to show this menu via the "popupShow" method, set the isPopup:true option.'),void 0;if(this.hideTimeout&&(clearTimeout(this.hideTimeout),this.hideTimeout=0),this.$root.dataSM("shown-before",!0),canAnimate&&this.$root.stop(!0,!0),!this.$root.is(":visible")){this.$root.css({left:t,top:e});var i=this,s=function(){i.$root.css("overflow","")};canAnimate&&this.opts.showFunction?this.opts.showFunction.call(this,this.$root,s):this.$root.show(this.opts.showDuration,s),this.visibleSubMenus[0]=this.$root}},refresh:function(){this.destroy(!0),this.init(!0)},rootKeyDown:function(t){if(this.handleEvents())switch(t.keyCode){case 27:var e=this.activatedItems[0];if(e){this.menuHideAll(),e[0].focus();var i=e.dataSM("sub");i&&this.menuHide(i)}break;case 32:var s=$(t.target);if(s.is("a")&&this.handleItemEvents(s)){var i=s.dataSM("sub");i&&!i.is(":visible")&&(this.itemClick({currentTarget:t.target}),t.preventDefault())}}},rootOut:function(t){if(this.handleEvents()&&!this.isTouchMode()&&t.target!=this.$root[0]&&(this.hideTimeout&&(clearTimeout(this.hideTimeout),this.hideTimeout=0),!this.opts.showOnClick||!this.opts.hideOnClick)){var e=this;this.hideTimeout=setTimeout(function(){e.menuHideAll()},this.opts.hideTimeout)}},rootOver:function(t){this.handleEvents()&&!this.isTouchMode()&&t.target!=this.$root[0]&&this.hideTimeout&&(clearTimeout(this.hideTimeout),this.hideTimeout=0)},winResize:function(t){if(this.handleEvents()){if(!("onorientationchange"in window)||"orientationchange"==t.type){var e=this.isCollapsible();this.wasCollapsible&&e||(this.activatedItems.length&&this.activatedItems[this.activatedItems.length-1][0].blur(),this.menuHideAll()),this.wasCollapsible=e}}else if(this.$disableOverlay){var i=this.$root.offset();this.$disableOverlay.css({top:i.top,left:i.left,width:this.$root.outerWidth(),height:this.$root.outerHeight()})}}}}),$.fn.dataSM=function(t,e){return e?this.data(t+"_smartmenus",e):this.data(t+"_smartmenus")},$.fn.removeDataSM=function(t){return this.removeData(t+"_smartmenus")},$.fn.smartmenus=function(options){if("string"==typeof options){var args=arguments,method=options;return Array.prototype.shift.call(args),this.each(function(){var t=$(this).data("smartmenus");t&&t[method]&&t[method].apply(t,args)})}return this.each(function(){var dataOpts=$(this).data("sm-options")||null;if(dataOpts)try{dataOpts=eval("("+dataOpts+")")}catch(e){dataOpts=null,alert('ERROR\n\nSmartMenus jQuery init:\nInvalid "data-sm-options" attribute value syntax.')}new $.SmartMenus(this,$.extend({},$.fn.smartmenus.defaults,options,dataOpts))})},$.fn.smartmenus.defaults={isPopup:!1,mainMenuSubOffsetX:0,mainMenuSubOffsetY:0,subMenusSubOffsetX:0,subMenusSubOffsetY:0,subMenusMinWidth:"10em",subMenusMaxWidth:"20em",subIndicators:!0,subIndicatorsPos:"append",subIndicatorsText:"",scrollStep:30,scrollAccelerate:!0,showTimeout:250,hideTimeout:500,showDuration:0,showFunction:null,hideDuration:0,hideFunction:function(t,e){t.fadeOut(200,e)},collapsibleShowDuration:0,collapsibleShowFunction:function(t,e){t.slideDown(200,e)},collapsibleHideDuration:0,collapsibleHideFunction:function(t,e){t.slideUp(200,e)},showOnClick:!1,hideOnClick:!0,noMouseOver:!1,keepInViewport:!0,keepHighlighted:!0,markCurrentItem:!1,markCurrentTree:!0,rightToLeftSubMenus:!1,bottomToTopSubMenus:!1,collapsibleBehavior:"default"},$});
\ No newline at end of file
diff --git a/libraries_2ScrewTheoryLib_2LogComponent_8hpp_source.html b/libraries_2ScrewTheoryLib_2LogComponent_8hpp_source.html
new file mode 100644
index 000000000..28e9ec982
--- /dev/null
+++ b/libraries_2ScrewTheoryLib_2LogComponent_8hpp_source.html
@@ -0,0 +1,93 @@
+
+
+
+
+
+
+
+kinematics-dynamics: libraries/ScrewTheoryLib/LogComponent.hpp Source File
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __SCREW_THEORY_LOG_COMPONENT_HPP__
+
2 #define __SCREW_THEORY_LOG_COMPONENT_HPP__
+
+
4 #include <yarp/os/LogComponent.h>
+
+
6 YARP_DECLARE_LOG_COMPONENT(ST)
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __ASIBOT_SOLVER_LOG_COMPONENT_HPP__
+
2 #define __ASIBOT_SOLVER_LOG_COMPONENT_HPP__
+
+
4 #include <yarp/os/LogComponent.h>
+
+
6 YARP_DECLARE_LOG_COMPONENT(ASIBOT)
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __BASIC_CARTESIAN_CONTROL_LOG_COMPONENT_HPP__
+
2 #define __BASIC_CARTESIAN_CONTROL_LOG_COMPONENT_HPP__
+
+
4 #include <yarp/os/LogComponent.h>
+
+
6 YARP_DECLARE_LOG_COMPONENT(BCC)
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __CARTESIAN_CONTROL_CLIENT_LOG_COMPONENT_HPP__
+
2 #define __CARTESIAN_CONTROL_CLIENT_LOG_COMPONENT_HPP__
+
+
4 #include <yarp/os/LogComponent.h>
+
+
6 YARP_DECLARE_LOG_COMPONENT(CCC)
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __CARTESIAN_CONTROL_SERVER_LOG_COMPONENT_HPP__
+
2 #define __CARTESIAN_CONTROL_SERVER_LOG_COMPONENT_HPP__
+
+
4 #include <yarp/os/LogComponent.h>
+
+
6 YARP_DECLARE_LOG_COMPONENT(CCS)
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __KDL_SOLVER_LOG_COMPONENT_HPP__
+
2 #define __KDL_SOLVER_LOG_COMPONENT_HPP__
+
+
4 #include <yarp/os/LogComponent.h>
+
+
6 YARP_DECLARE_LOG_COMPONENT(KDLS)
+
7 YARP_DECLARE_LOG_COMPONENT(KDLS_QUIET)
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __KDL_TREE_SOLVER_LOG_COMPONENT_HPP__
+
2 #define __KDL_TREE_SOLVER_LOG_COMPONENT_HPP__
+
+
4 #include <yarp/os/LogComponent.h>
+
+
6 YARP_DECLARE_LOG_COMPONENT(KDLS)
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
First install the dependencies:
+
+
We optionally use the ProximitySensorsClient device from yarp-devices in the haarDetectionController app. Refer to its installation guide for instructions.
+
For unit testing, you'll need the googletest source package. Refer to Install googletest.
+
+Install kinematics-dynamics on Ubuntu (working on all tested versions)
+
Our software integrates the previous dependencies. Note that you will be prompted for your password upon using sudo a couple of times:
+
cd # go home
+
mkdir -p repos; cd repos # create $HOME/repos if it does not exist; then, enter it
+
git clone https://github.com/roboticslab-uc3m/kinematics-dynamics.git # download kinematics-dynamics sources from GitHub
+
cd kinematics-dynamics; mkdir build; cd build; cmake .. # configure the project
+
make -j # compile
+
sudo make install; sudo ldconfig # install
+
Use ccmake instead of cmake for additional options.
+
+Install Bindings
+
Swig is needed in order to build all language bindings. Refer to Install SWIG.
+
+Install Python Bindings
+
First, install Python development packages.
+
sudo apt update
+
sudo apt install libpython3-dev # not installed by default on clean distros
+
You can follow these steps after installing kinematics-dynamics, or just activate the correct CMake options during the initial build.
+
cd # go home
+
cd repos/kinematics-dynamics/build # this should already exist, see previous section
+
cmake .. -DCREATE_PYTHON=ON -DCREATE_BINDINGS_PYTHON=ON # enable Python bindings
+
make -j # compile
+
sudo make install; sudo ldconfig; cd # install and go home
+
Note: You'll probably want YARP Python bindings (perma), too.
+
+Install Python bindings (checking)
+
Check your installation via (should output nothing; if bad, you will see a ModuleNotFoundError):
+
python3 -c "import kinematics_dynamics"
+
+Install Python bindings (troubleshooting)
+
CMake may not detect the correct Python3 installation directory. Toggle t in ccmake to see additional configuration. The CMAKE_INSTALL_PYTHONDIR variable may point to a wrong path such as lib/python3/dist-packages (relative to CMAKE_INSTALL_PREFIX, which usually resolves to /usr/local). You must pick the python3.x directory instead (check via python3 -V); on Ubuntu 20.04 and Python 3.8, this configuration variable should be changed to lib/python3.8/dist-packages.
+
+Even more!
+
Done! You are now probably interested in one of the following links:
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Now that you have installed the basic TEO repository, you're probably wondering what to do.
+
+Initializing the communication server
+
Our current implementation uses YARP for communication. Basic use of YARP requires the use of a centralized server. This server associates the low-level implementation of the communication ports with the names we give them. Before executing any TEO program or application, please launch a yarp server:
+
[terminal 1] yarp server
+
+Launching the simulator
+
Launch with a single command:
+
You should get a window similar to the one depicted on Figure 1.
+

Fig. 1 - An instance of the teoSim program.
+Changing parameters
+
Each layer of TEO programs has parameters that can be modified three different ways. They are parsed in the following order (the second parsing overwrites the first, and the third one overwrites both):
+
+- Default parameters defined in the class header files (*.h or *.hpp extension). You must recompile the project if you change any of these parameters.
+- Configuration files (*.ini or *.xml extension). These files are downloaded from kinematics-dynamics/share and installed to kinematics-dynamics/build/share/teo with the cmake command we issued. Within this folder, separate folders are maintained for programs and program layers.
+- Command line (on program execution). Parameters may be modified executing a program using the following format: ./program --parameter new_value.
+
+
Let's say, for example, our graphic card supports offscreen rendering and we want teoSim to load an enviroment that has cameras in the simulated environment. We can execute the program touching the parameters at the command line level which, as we have said, are parsed last:
+
[terminal 2] teoSim --env teo_kitchen_cameras.env.xml
+
This specific environment contains simulated cameras that Figure 2. You can learn how to make the connections in the testRaveBot documentation.
+
+

+
+
We can actually see the default parameters, and the final selected ones, with the --help parameter:
+
[terminal 2] teoSim --env teo_kitchen_cameras.env.xml --help
+
If we want to affect this parameter at a more persistent level, we can change the configuration file. For this specific case, the teoSim configuration file is located at $ROBOTICSLAB_KINEMATICS_DYNAMICS_ROOT/app/teoSim/conf/teoSim.ini. In this file, we can see that most parameters are commented out (the // characters). This is a common convention to indicate these are the default parameters set in the headers (the first parsed, as explained previously). Here, we would search to subsitute the line:
+
// env teo_kitchen.env.xml /// env [xml] environment name in abs or rel
+
With a new, uncommented line:
+
env teo_kitchen_cameras.env.xml /// env [xml] environment name in abs or rel
+
+Interfacing
+
We can interact with this program through port commands as described in testRaveBot and teoSim, or through the different language APIs as can be seen in the different TEO examples
+
+Even more!
+
Done! You are now probably interested in one of the following links:
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all modules:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented namespace members with links to the namespaces they belong to:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/namespacemembers_func.html b/namespacemembers_func.html
new file mode 100644
index 000000000..0e605bb43
--- /dev/null
+++ b/namespacemembers_func.html
@@ -0,0 +1,148 @@
+
+
+
+
+
+
+
+kinematics-dynamics: Namespace Members
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/namespaceroboticslab.html b/namespaceroboticslab.html
new file mode 100644
index 000000000..7758a0be2
--- /dev/null
+++ b/namespaceroboticslab.html
@@ -0,0 +1,477 @@
+
+
+
+
+
+
+
+kinematics-dynamics: roboticslab Namespace Reference
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
The main, catch-all namespace for Robotics Lab UC3M.
+
+
+ |
+| | KdlVectorConverter |
+| | Collection of utilities related to KDL and std::vector classes.
|
+| |
+| | KinRepresentation |
+| | Collection of static methods to perform geometric transformations.
|
+| |
+| | test |
+| | Contains classes related to unit testing.
|
+| |
+
+ |
+| KDL::Rotation | vectorPow2 (const KDL::Vector &v) |
+| | Multiply a vector by itself to obtain a square matrix. More...
|
+| |
+| double | normalizeAngle (double angle) |
+| | Clip an angle value between certain bounds. More...
|
+| |
+| double | toDeg (const double inRad) |
+| |
+| double | toRad (const double inDeg) |
+| |
+| void | xUpdateH (const yarp::sig::Vector &x, yarp::sig::Matrix &H) |
+| |
+|
+yarp::sig::Matrix | rotX (const double &inDeg) |
+| |
+|
+yarp::sig::Matrix | rotY (const double &inDeg) |
+| |
+|
+yarp::sig::Matrix | rotZ (const double &inDeg) |
+| |
+| yarp::sig::Matrix | eulerZYZtoH (const yarp::sig::Vector &x, const yarp::sig::Vector &o) |
+| |
+| yarp::sig::Matrix | eulerYZtoH (const yarp::sig::Vector &x, const yarp::sig::Vector &o) |
+| |
+| yarp::sig::Matrix | axisAngleToH (const yarp::sig::Vector &x, const yarp::sig::Vector &o) |
+| |
+
+
+
+
◆ axisAngleToH()
+
+
+
+
+
+ | yarp::sig::Matrix roboticslab::axisAngleToH |
+ ( |
+ const yarp::sig::Vector & |
+ x, |
+
+
+ |
+ |
+ const yarp::sig::Vector & |
+ o |
+
+
+ |
+ ) |
+ | |
+
+
+
+
Thanks [Ugo Pattacini, Serena Ivaldi, Francesco Nori ((iCub ctrllib/math.h))] for axis2dcm().
- Parameters
-
+
+ | x | 3-vector in meters. |
+ | o | 4-vector in degrees. |
+
+
+
+
- Returns
- Homogeneous matrix (4x4).
+
+
+
+
+
◆ eulerYZtoH()
+
+
+
+
+
+ | yarp::sig::Matrix roboticslab::eulerYZtoH |
+ ( |
+ const yarp::sig::Vector & |
+ x, |
+
+
+ |
+ |
+ const yarp::sig::Vector & |
+ o |
+
+
+ |
+ ) |
+ | |
+
+
+
+
Uses x to compute rot(Z).
- Parameters
-
+
+ | x | 3-vector in meters. |
+ | o | 2-vector in degrees. |
+
+
+
+
- Returns
- Homogeneous matrix (4x4).
+
+
+
+
+
◆ eulerZYZtoH()
+
+
+
+
+
+ | yarp::sig::Matrix roboticslab::eulerZYZtoH |
+ ( |
+ const yarp::sig::Vector & |
+ x, |
+
+
+ |
+ |
+ const yarp::sig::Vector & |
+ o |
+
+
+ |
+ ) |
+ | |
+
+
+
+
- Parameters
-
+
+ | x | 3-vector in meters. |
+ | o | 3-vector in degrees. |
+
+
+
+
- Returns
- Homogeneous matrix (4x4).
+
+
+
+
+
◆ toDeg()
+
+
+
+
+
+ | double roboticslab::toDeg |
+ ( |
+ const double |
+ inRad | ) |
+ |
+
+
+
+
Simple function to pass from radians to degrees.
- Parameters
-
+
+ | inRad | angle value in radians. |
+
+
+
+
- Returns
- angle value in degrees.
+
+
+
+
+
◆ toRad()
+
+
+
+
+
+ | double roboticslab::toRad |
+ ( |
+ const double |
+ inDeg | ) |
+ |
+
+
+
+
Simple function to pass from degrees to radians.
- Parameters
-
+
+ | inDeg | angle value in degrees. |
+
+
+
+
- Returns
- angle value in radians.
+
+
+
+
+
◆ xUpdateH()
+
+
+
+
+
+ | void roboticslab::xUpdateH |
+ ( |
+ const yarp::sig::Vector & |
+ x, |
+
+
+ |
+ |
+ yarp::sig::Matrix & |
+ H |
+
+
+ |
+ ) |
+ | |
+
+
+
+
Update x values of an homogeneous matrix.
- Parameters
-
+
+ | x | 3-vector input. |
+ | H | homogeneous matrix (4x4) that will be modified. |
+
+
+
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Collection of utilities related to KDL and std::vector classes.
+
+
+ |
+| KDL::Frame | vectorToFrame (const std::vector< double > &x) |
+| | Convert from std::vector<double> to KDL::Frame. More...
|
+| |
+| std::vector< double > | frameToVector (const KDL::Frame &f) |
+| | Convert from KDL::Frame to std::vector<double> More...
|
+| |
+| KDL::Twist | vectorToTwist (const std::vector< double > &xdot) |
+| | Convert from std::vector<double> to KDL::Twist. More...
|
+| |
+| std::vector< double > | twistToVector (const KDL::Twist &t) |
+| | Convert from KDL::Twist to std::vector<double> More...
|
+| |
+| KDL::Wrench | vectorToWrench (const std::vector< double > &f) |
+| | Convert from std::vector<double> to KDL::Wrench. More...
|
+| |
+| std::vector< double > | wrenchToVector (const KDL::Wrench &w) |
+| | Convert from KDL::Wrench to std::vector<double> More...
|
+| |
+
+
+
+
◆ frameToVector()
+
+
+
+
+
+ | std::vector< double > roboticslab::KdlVectorConverter::frameToVector |
+ ( |
+ const KDL::Frame & |
+ f | ) |
+ |
+
+
+
+
- Parameters
-
+
+ | f | Input KDL::Frame object. |
+
+
+
+
- Returns
- Resulting 6-element vector describing a position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians).
+
+
+
+
+
◆ twistToVector()
+
+
+
+
+
+ | std::vector< double > roboticslab::KdlVectorConverter::twistToVector |
+ ( |
+ const KDL::Twist & |
+ t | ) |
+ |
+
+
+
+
- Parameters
-
+
+ | t | Input KDL::Twist object |
+
+
+
+
- Returns
- Resulting 6-element vector describing a velocity in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second).
+
+
+
+
+
◆ vectorToFrame()
+
+
+
+
+
+ | KDL::Frame roboticslab::KdlVectorConverter::vectorToFrame |
+ ( |
+ const std::vector< double > & |
+ x | ) |
+ |
+
+
+
+
- Parameters
-
+
+ | x | 6-element vector describing a position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). |
+
+
+
+
- Returns
- Resulting KDL::Frame object.
+
+
+
+
+
◆ vectorToTwist()
+
+
+
+
+
+ | KDL::Twist roboticslab::KdlVectorConverter::vectorToTwist |
+ ( |
+ const std::vector< double > & |
+ xdot | ) |
+ |
+
+
+
+
- Parameters
-
+
+ | xdot | 6-element vector describing a velocity in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second). |
+
+
+
+
- Returns
- Resulting KDL::Twist object.
+
+
+
+
+
◆ vectorToWrench()
+
+
+
+
+
+ | KDL::Wrench roboticslab::KdlVectorConverter::vectorToWrench |
+ ( |
+ const std::vector< double > & |
+ f | ) |
+ |
+
+
+
+
- Parameters
-
+
+ | xdot | 6-element vector describing a wrench in cartesian space; first three elements denote force (N), last three denote torque (Nm). |
+
+
+
+
- Returns
- Resulting KDL::Wrench object.
+
+
+
+
+
◆ wrenchToVector()
+
+
+
+
+
+ | std::vector< double > roboticslab::KdlVectorConverter::wrenchToVector |
+ ( |
+ const KDL::Wrench & |
+ w | ) |
+ |
+
+
+
+
- Parameters
-
+
+ | t | Input KDL::Wrench object |
+
+
+
+
- Returns
- Resulting 6-element vector describing a wrench in cartesian space; first three elements denote force (N), last three denote torque (Nm).
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Collection of static methods to perform geometric transformations.
+
+
+ |
+| enum class | coordinate_system { CARTESIAN
+, CYLINDRICAL
+, SPHERICAL
+, NONE
+ } |
+| | Lists available translational representations. More...
|
+| |
+| enum class | orientation_system {
+ AXIS_ANGLE
+, AXIS_ANGLE_SCALED
+, RPY
+, EULER_YZ
+,
+ EULER_ZYZ
+, POLAR_AZIMUTH
+, NONE
+
+ } |
+| | Lists available rotational representations. More...
|
+| |
+| enum class | angular_units { DEGREES
+, RADIANS
+ } |
+| | Lists recognized angular units. More...
|
+| |
+
+ |
+| bool | encodePose (const std::vector< double > &x_in, std::vector< double > &x_out, coordinate_system coord, orientation_system orient, angular_units angle=angular_units::RADIANS) |
+| | Converts the translation and rotation values of a specific pose to coordinate_system::CARTESIAN and orientation_system::AXIS_ANGLE_SCALED systems. More...
|
+| |
+| bool | decodePose (const std::vector< double > &x_in, std::vector< double > &x_out, coordinate_system coord, orientation_system orient, angular_units angle=angular_units::RADIANS) |
+| | Converts the translation and rotation values of a specific pose to the chosen representation systems. More...
|
+| |
+| bool | encodeVelocity (const std::vector< double > &x_in, const std::vector< double > &xdot_in, std::vector< double > &xdot_out, coordinate_system coord, orientation_system orient, angular_units angle=angular_units::RADIANS) |
+| | Converts the translation and rotation values of a specific velocity to coordinate_system::CARTESIAN and orientation_system::AXIS_ANGLE_SCALED systems. More...
|
+| |
+| bool | decodeVelocity (const std::vector< double > &x_in, const std::vector< double > &xdot_in, std::vector< double > &xdot_out, coordinate_system coord, orientation_system orient, angular_units angle=angular_units::RADIANS) |
+| | Converts the translation and rotation values of a specific velocity to the chosen representation systems. More...
|
+| |
+| bool | encodeAcceleration (const std::vector< double > &x_in, const std::vector< double > &xdot_in, const std::vector< double > &xdotdot_in, std::vector< double > &xdotdot_out, coordinate_system coord, orientation_system orient, angular_units angle=angular_units::RADIANS) |
+| | Converts the translation and rotation values of a specific acceleration to coordinate_system::CARTESIAN and orientation_system::AXIS_ANGLE_SCALED systems. More...
|
+| |
+| bool | decodeAcceleration (const std::vector< double > &x_in, const std::vector< double > &xdot_in, const std::vector< double > &xdotdot_in, std::vector< double > &xdotdot_out, coordinate_system coord, orientation_system orient, angular_units angle=angular_units::RADIANS) |
+| | Converts the translation and rotation values of a specific acceleration to the chosen representation systems. More...
|
+| |
+| double | degToRad (double deg) |
+| | Converts degrees to radians. More...
|
+| |
+| double | radToDeg (double rad) |
+| | Converts radians to degrees. More...
|
+| |
+| bool | parseEnumerator (const std::string &str, coordinate_system *coord, coordinate_system fallback=coordinate_system::CARTESIAN) |
+| | Parses input string, returns matching enumerator value. More...
|
+| |
+| bool | parseEnumerator (const std::string &str, orientation_system *orient, orientation_system fallback=orientation_system::AXIS_ANGLE_SCALED) |
+| | Parses input string, returns matching enumerator value. More...
|
+| |
+| bool | parseEnumerator (const std::string &str, angular_units *units, angular_units fallback=angular_units::RADIANS) |
+| | Parses input string, returns matching enumerator value. More...
|
+| |
+
+
+
+
◆ angular_units
+
+
+
+
+| Enumerator |
|---|
| DEGREES | degrees (deg)
+ |
+| RADIANS | radians (rad)
+ |
+
+
+
+
+
+
◆ coordinate_system
+
+
+
+
+| Enumerator |
|---|
| CARTESIAN | (x distance, y distance, z distance)
+ |
+| CYLINDRICAL | (radial distance, azimuthal angle, height)
+ |
+| SPHERICAL | (radial distance, polar angle, azimuthal angle)
+ |
+| NONE | omit coordinate system in resulting combined coord+orient representation
+ |
+
+
+
+
+
+
◆ orientation_system
+
+
+
+
+| Enumerator |
|---|
| AXIS_ANGLE | (axis_x, axis_y, axis_z, rotation angle) [axis needs not to be normalized]
+ |
+| AXIS_ANGLE_SCALED | (axis_x, axis_y, axis_z) [axis' norm is the rotation angle]
+ |
+| RPY | fixed axes, roll is axis_x
+ |
+| EULER_YZ | as EULER_ZYZ, preceded by rotation about the azimuthal angle got from x-y coordinates
+ |
+| EULER_ZYZ | mobile axes
+ |
+| POLAR_AZIMUTH | (polar angle, azimuthal angle)
+ |
+| NONE | omit orientation system in resulting combined coord+orient representation
+ |
+
+
+
+
+
+
+
◆ decodeAcceleration()
+
+
+
+
+
+ | bool roboticslab::KinRepresentation::decodeAcceleration |
+ ( |
+ const std::vector< double > & |
+ x_in, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ xdot_in, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ xdotdot_in, |
+
+
+ |
+ |
+ std::vector< double > & |
+ xdotdot_out, |
+
+
+ |
+ |
+ coordinate_system |
+ coord, |
+
+
+ |
+ |
+ orientation_system |
+ orient, |
+
+
+ |
+ |
+ angular_units |
+ angle = angular_units::RADIANS |
+
+
+ |
+ ) |
+ | |
+
+
+
+
Supports in-place transformation.
+
- Parameters
-
+
+
+
+
- Returns
- true on success, false otherwise.
+
+
+
+
+
◆ decodePose()
+
+
+
+
Supports in-place transformation.
+
- Parameters
-
+
+ | x_in | Input vector describing a three-dimensional pose in coordinate_system::CARTESIAN and orientation_system::AXIS_ANGLE_SCALED systems. |
+ | x_out | Output vector describing the same pose in the chosen representation system. |
+ | coord | Coordinate system for the translational part. |
+ | orient | Orientation system for the rotational part. |
+ | angle | Units in which angular values are expressed. |
+
+
+
+
- Returns
- true on success, false otherwise.
+
+
+
+
+
◆ decodeVelocity()
+
+
+
+
Supports in-place transformation.
+
- Parameters
-
+
+
+
+
- Returns
- true on success, false otherwise.
+
+
+
+
+
◆ degToRad()
+
+
+
+
+
+ | double roboticslab::KinRepresentation::degToRad |
+ ( |
+ double |
+ deg | ) |
+ |
+
+
+
+
- Parameters
-
+
+ | deg | Angle value expressed in degrees. |
+
+
+
+
- Returns
- Same value expressed in radians.
+
+
+
+
+
◆ encodeAcceleration()
+
+
+
+
+
+ | bool roboticslab::KinRepresentation::encodeAcceleration |
+ ( |
+ const std::vector< double > & |
+ x_in, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ xdot_in, |
+
+
+ |
+ |
+ const std::vector< double > & |
+ xdotdot_in, |
+
+
+ |
+ |
+ std::vector< double > & |
+ xdotdot_out, |
+
+
+ |
+ |
+ coordinate_system |
+ coord, |
+
+
+ |
+ |
+ orientation_system |
+ orient, |
+
+
+ |
+ |
+ angular_units |
+ angle = angular_units::RADIANS |
+
+
+ |
+ ) |
+ | |
+
+
+
+
Supports in-place transformation.
+
- Parameters
-
+
+ | x_in | Input vector describing a three-dimensional pose (translation + rotation). |
+ | xdot_in | Input vector describing a three-dimensional velocity (translation + rotation). |
+ | xdotdot_in | Input vector describing a three-dimensional acceleration (translation + rotation). |
+ | xdotdot_out | Output vector describing the same acceleration in coordinate_system::CARTESIAN and orientation_system::AXIS_ANGLE_SCALED systems. |
+ | coord | Coordinate system for the translational part. |
+ | orient | Orientation system for the rotational part. |
+ | angle | Units in which angular values are expressed. |
+
+
+
+
- Returns
- true on success, false otherwise.
+
+
+
+
+
◆ encodePose()
+
+
+
+
Supports in-place transformation.
+
- Parameters
-
+
+ | x_in | Input vector describing a three-dimensional pose (translation + rotation). |
+ | x_out | Output vector describing the same pose in coordinate_system::CARTESIAN and orientation_system::AXIS_ANGLE_SCALED notation. |
+ | coord | Coordinate system for the translational part. |
+ | orient | Orientation system for the rotational part. |
+ | angle | Units in which angular values are expressed. |
+
+
+
+
- Returns
- true on success, false otherwise.
+
+
+
+
+
◆ encodeVelocity()
+
+
+
+
Supports in-place transformation.
+
- Parameters
-
+
+ | x_in | Input vector describing a three-dimensional pose (translation + rotation). |
+ | xdot_in | Input vector describing a three-dimensional velocity (translation + rotation). |
+ | xdot_out | Output vector describing the same velocity in coordinate_system::CARTESIAN and orientation_system::AXIS_ANGLE_SCALED systems. |
+ | coord | Coordinate system for the translational part. |
+ | orient | Orientation system for the rotational part. |
+ | angle | Units in which angular values are expressed. |
+
+
+
+
- Returns
- true on success, false otherwise.
+
+
+
+
+
◆ parseEnumerator() [1/3]
+
+
+
+
+
- Parameters
-
+
+ | str | Input string. |
+ | units | See angular_units. |
+ | fallback | Default value if no match found. |
+
+
+
+
- Returns
- true if match found, false otherwise
+
+
+
+
+
◆ parseEnumerator() [2/3]
+
+
+
+
+
- Parameters
-
+
+ | str | Input string. |
+ | coord | See coordinate_system. |
+ | fallback | Default value if no match found. |
+
+
+
+
- Returns
- true if match found, false otherwise
+
+
+
+
+
◆ parseEnumerator() [3/3]
+
+
+
+
+
- Parameters
-
+
+ | str | Input string. |
+ | orient | See orientation_system. |
+ | fallback | Default value if no match found. |
+
+
+
+
- Returns
- true if match found, false otherwise
+
+
+
+
+
◆ radToDeg()
+
+
+
+
+
+ | double roboticslab::KinRepresentation::radToDeg |
+ ( |
+ double |
+ rad | ) |
+ |
+
+
+
+
- Parameters
-
+
+ | rad | Angle value expressed in radians. |
+
+
+
+
- Returns
- Same value expressed in degrees.
+
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Contains classes related to unit testing.
+
+
+ |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverAppendLink) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverRestoreOriginalChain) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverFwdKin1) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverFwdKin2) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverFwdKinTool) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverPoseDiff) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverInvKin1) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverInvKin2) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverInvKin3) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverInvKin4) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverInvKin5) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverInvKinTool) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverDiffInvKin) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverDiffInvKinEE) |
+| |
+|
+ | TEST_F (AsibotSolverTestFromFile, AsibotSolverDiffInvKinTool) |
+| |
+|
+ | TEST_F (BasicCartesianControlTest, BasicCartesianControlStat) |
+| |
+|
+ | TEST_F (BasicCartesianControlTest, BasicCartesianControlInv1) |
+| |
+|
+ | TEST_F (BasicCartesianControlTest, BasicCartesianControlInv2) |
+| |
+|
+ | TEST_F (BasicCartesianControlTest, BasicCartesianControlTool) |
+| |
+|
+ | TEST_F (KdlSolverTest, ChainSize) |
+| |
+|
+ | TEST_F (KdlSolverTest, FwdKin1) |
+| |
+|
+ | TEST_F (KdlSolverTest, FwdKin2) |
+| |
+|
+ | TEST_F (KdlSolverTest, InvKin1) |
+| |
+|
+ | TEST_F (KdlSolverTest, InvKin2) |
+| |
+|
+ | TEST_F (KdlSolverTest, InvDyn1) |
+| |
+|
+ | TEST_F (KdlSolverTest, InvDyn2) |
+| |
+|
+ | TEST_F (KdlSolverTest, InvDyn3) |
+| |
+|
+ | TEST_F (KdlSolverTest, InvDyn4) |
+| |
+|
+ | TEST_F (KdlSolverTest, InvDyn5) |
+| |
+|
+ | TEST_F (KdlSolverTestFromFile, KdlSolverFwdKin1) |
+| |
+|
+ | TEST_F (KdlSolverTestFromFile, KdlSolverFwdKin2) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationEncodePoseAxisAngle) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationEncodePoseAxisAngleScaled) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationEncodePoseRPY) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationEncodePoseEulerYZ) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationEncodePoseEulerZYZ) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationEncodePosePolarAzimuth) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationEncodePoseRadians) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationDecodePoseAxisAngle) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationDecodePoseAxisAngleScaled) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationDecodePoseRPY) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationDecodePoseEulerYZ) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationDecodePoseEulerZYZ) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationDecodePosePolarAzimuth) |
+| |
+|
+ | TEST_F (KinRepresentationTest, KinRepresentationDecodePoseRadians) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, MatrixExponentialInit) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, MatrixExponentialRotation) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, MatrixExponentialTranslation) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, ProductOfExponentialsInit) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, ProductOfExponentialsFromChain) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, ProductOfExponentialsToChain) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, ProductOfExponentialsIntegrity) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, ProductOfExponentialsReverse) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, PadenKahanOne) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, PadenKahanTwo) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, PadenKahanThree) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, PardosOne) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, PardosTwo) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, PardosThree) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, PardosFour) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, AbbIrb120Kinematics) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, PumaKinematics) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, StanfordKinematics) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, AbbIrb910scKinematics) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, AbbIrb6620lxKinematics) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, TeoRightArmKinematics) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, TeoRightLegKinematics) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, ConfigurationSelector) |
+| |
+|
+ | TEST_F (ScrewTheoryTest, ConfigurationSelectorGait) |
+| |
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all documented namespaces with brief descriptions:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Here is a list of all related documentation pages:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __HAAR_DETECTION_CONTROLLER_LOG_COMPONENT_HPP__
+
2 #define __HAAR_DETECTION_CONTROLLER_LOG_COMPONENT_HPP__
+
+
4 #include <yarp/os/LogComponent.h>
+
+
6 YARP_DECLARE_LOG_COMPONENT(HDC)
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __KEYBOARD_CONTROLLER_LOG_COMPONENT_HPP__
+
2 #define __KEYBOARD_CONTROLLER_LOG_COMPONENT_HPP__
+
+
4 #include <yarp/os/LogComponent.h>
+
+
6 YARP_DECLARE_LOG_COMPONENT(KC)
+
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1 #ifndef __STREAMING_DEVICE_CONTROLLER_LOG_COMPONENT_HPP__
+
2 #define __STREAMING_DEVICE_CONTROLLER_LOG_COMPONENT_HPP__
+
+
4 #include <yarp/os/LogComponent.h>
+
+
6 YARP_DECLARE_LOG_COMPONENT(SDC)
+
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
Loading...
+
+
+
Searching...
+
No Matches
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::AsibotConfiguration::Pose, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Helper class to store a specific robot configuration.
+
+
+
#include <AsibotConfiguration.hpp>
+
+ |
+| enum | orientation { FORWARD
+, REVERSED
+ } |
+| | Orientation of axis 1 ('forward' or 180º offset).
|
+| |
+| enum | elbow { UP
+, DOWN
+ } |
+| | Orientation of axes 2-3 (elbow up/down).
|
+| |
+
+ |
+|
+double | _q1 |
+| |
+|
+double | _q2 |
+| |
+|
+double | _q3 |
+| |
+|
+double | _q4 |
+| |
+|
+double | _q5 |
+| |
+|
+bool | valid |
+| |
+|
+orientation | _orient |
+| |
+|
+elbow | _elb |
+| |
+
+
The documentation for this struct was generated from the following files:
+- libraries/YarpPlugins/AsibotSolver/AsibotConfiguration.hpp
+- libraries/YarpPlugins/AsibotSolver/AsibotConfiguration.cpp
+
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::AsibotSolver::AsibotTcpFrame, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+|
+bool | hasFrame |
+| |
+|
+yarp::sig::Matrix | frameTcp |
+| |
+
+
The documentation for this struct was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::ScrewTheoryIkProblemBuilder::PoeTerm, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Helper structure that holds the state of a POE term.
+
+
+
#include <ScrewTheoryIkProblem.hpp>
+
+ |
+|
+bool | known |
+| |
+|
+bool | simplified |
+| |
+
+
The documentation for this struct was generated from the following file:
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
This is the complete list of members for roboticslab::test::ScrewTheoryTest::compare_solutions, including all inherited members.
+
+
+
+
+
+ |
+ kinematics-dynamics
+
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ |
+|
+bool | operator() (const std::pair< int, double > &lhs, const std::pair< int, double > &rhs) |
+| |
+
+
The documentation for this struct was generated from the following file:
+- tests/testScrewTheory.cpp
+
+
 Public Member Functions inherited from roboticslab::AsibotConfiguration
Public Member Functions inherited from roboticslab::AsibotConfiguration
