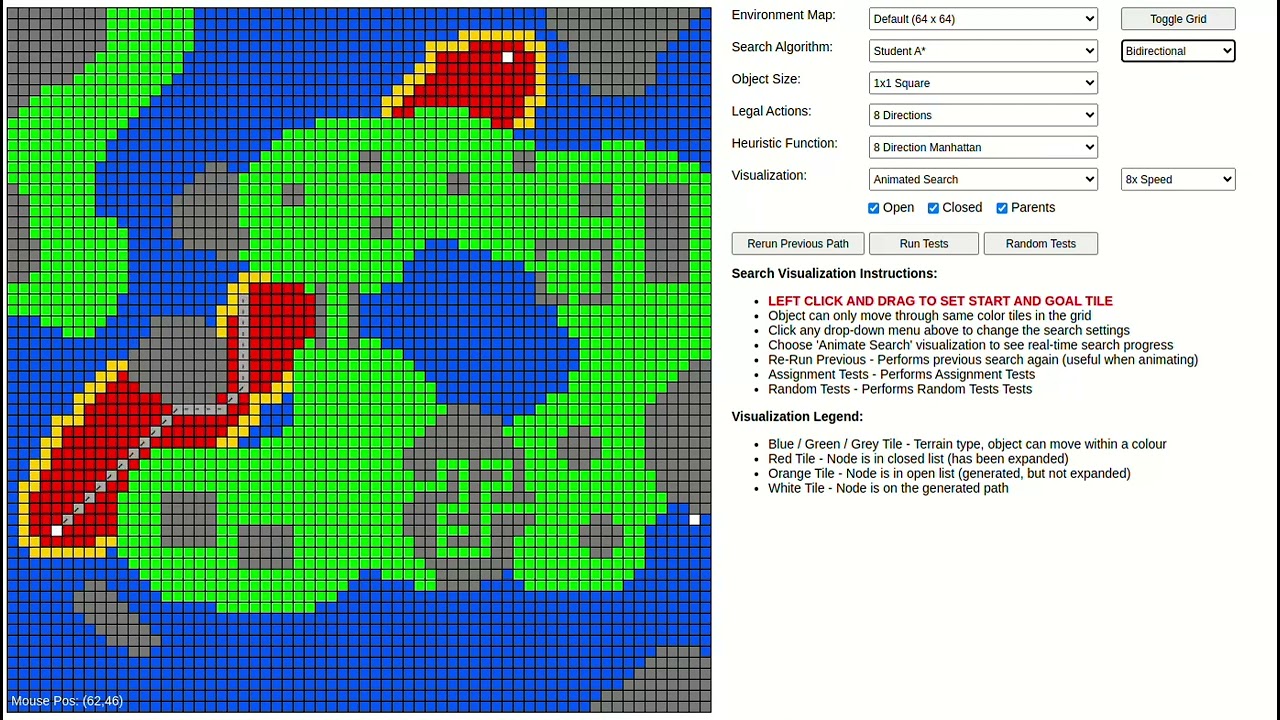
This code implements the A* algorithm for pathfinding, with support for both unidirectional and bidirectional search modes. It includes multiple heuristic options such as 8-directional Manhattan, 4-directional Manhattan, and 2D Euclidean distance.
The implementation consists of a class Search_Student which represents the search algorithm. Here's a brief overview of important methods:
- canFit(x, y, size): Computes whether a given size agent can fit at the specified (x, y) location.
- computeSectors(): Computes sectors using 4D BFS algorithm.
- isConnected(x1, y1, x2, y2, size): Determines whether two locations are connected.
- isLegalAction(x, y, action): Computes whether the given action can be performed from the given position.
- estimateCost(x, y, gx, gy): Computes the heuristic function h(n) from start location to goal location.
- startSearch(sx, sy, gx, gy, size): Initiates the search algorithm.
- searchIteration(): Performs a single iteration of the search algorithm.
- getOpen(): Returns the current open list states.
- getClosed(): Returns the current closed list states.
- Unidirectional Search: Searches from the start node towards the goal node.
- Bidirectional Search: Searches from both the start and goal nodes simultaneously, meeting at some midpoint.
- 8-directional Manhattan: Considers all 8 possible movement directions.
- 4-directional Manhattan: Considers only the 4 cardinal directions.
- 2D Euclidean Distance: Computes straight-line distance between two points.
- 8-directional Search with 4-directional Heuristic: Not admissible because it underestimates the true cost, leading to suboptimal paths.