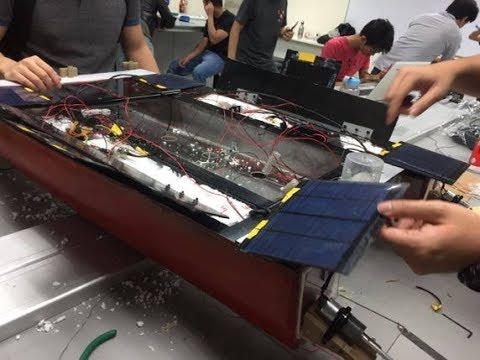
An autonomous boat powered by solar that used Arduino Mega to collect data. Setup of microcontroller please check SENSOR.md
Video is below
For making OOP work, if Arduino IDE is used, we need to make all the files into libraries. Atom (platformIO) is a preferred method for developing large projects like this.
we are using arduino UNO for testing and arduino MEGA for real use
in platformio.ini change: uno -> megaatmega2560
board = uno ;megaatmega2560
- Done ThingSpeak API Setup
- OOP part done for: UltraSonic, Turbidity, Dissolved O2, Temperature
- Detect UltraSonic Distance using HC-SR04
- Tested Use of temperature sensor LM35. circuit and codes:


source: instructables
- Turbidity sensor done reference
- added library
- Done OOP Object setup
- Basic setup of ThingSpeak (update and read) in reference
Original file by leo Arduino 1 has the GPS module, if you want to test it, test it on the TinyGPS++ "Full example" first, once it is okay, run the Final Arduino 2 file, that file is to upload the GPS to ThingSpeak
Arduino 2 attaches the compass for the bearing, which is supposedly to be run on Autopilot Main file
https://api.thingspeak.com/update?api_key=APIKEYS&field1=1&field2=2&field3=3
The thingspeak will return a number that indicates the location/sequence of the number
https://thingspeak.com/channels/123456
- Leo
- Lai
- Jason
- Anis
- Puteri
read LICENSE.txt (MIT License)