{kind=link}
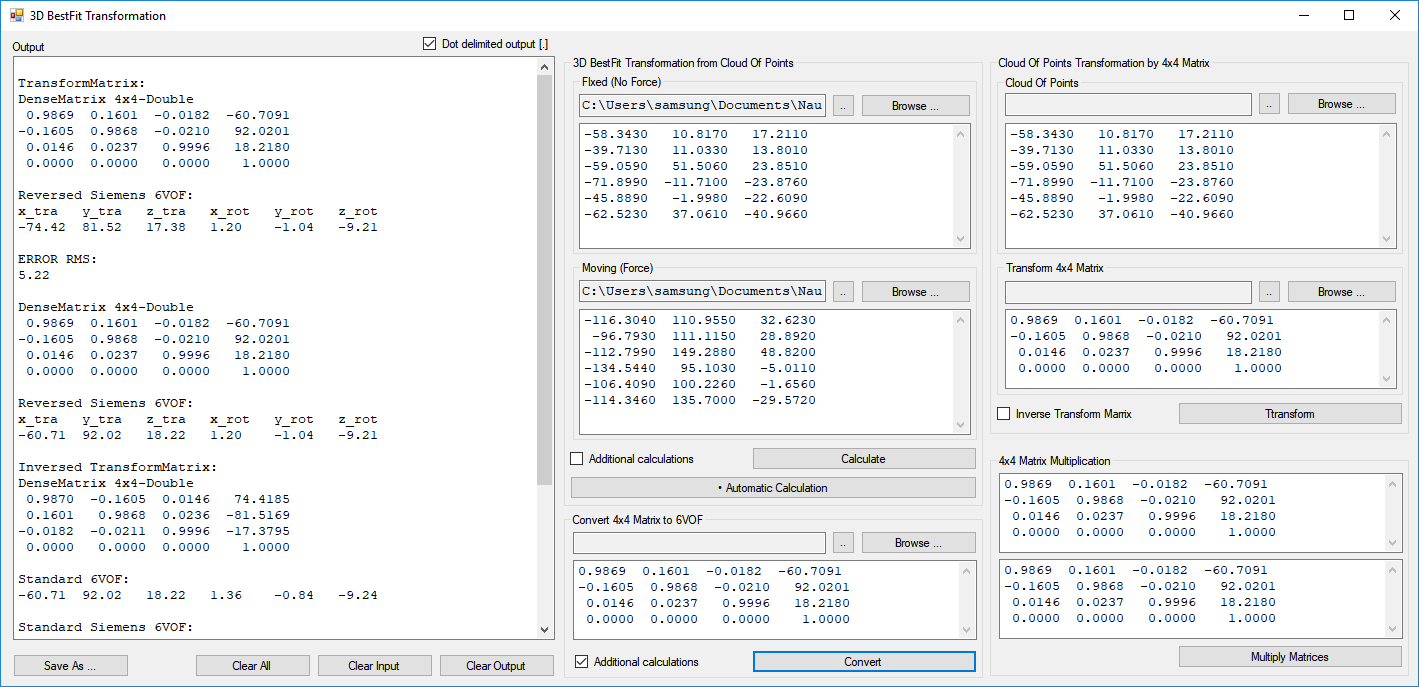
This is C# open source software to use for:
- Finding CloudOfPoints 3D BestFit transformation matrix
- Transform CloudOfPoints by matrix
- Matrices multiplification
It is based on https://github.com/danielorf/Transform3DBestFit
- G. A. Watson, ‘Computing Helmert Transformations’, Journal of Computational and Applied Mathematics, 197.2 (2006), 387–94, https://doi.org/10.1016/j.cam.2005.06.047
- Md. Tariqul Islam, ‘Least Square Approach to Estimate 3D Coordinate Transformation Parameters : A Case of Three Reference Systems in Sweden’, 3.3 (2014), 30–38, https://www.researchgate.net/publication/280881630_Least_Square_Approach_to_Estimate_3D_Coordinate_Transformation_Parameters_A_Case_of_Three_Reference_Systems_in_Sweden
- Brazeal, Ryan. "Three dimensional coordinate transformations for registering terrestrial laser scanning datasets based on tie points." SUR 6905–Point Cloud Analysis, 2013, DOI: https://doi.org/10.13140/2.1.1993.9204 (1993)
- D W Eggert, A Lorusso, and R B Fisher, Estimating 3-D Rigid Body Transformations: A Comparison of Four Major Algorithms, Machine Vision and Applications, 1997, IX https://doi.org/10.1007/s001380050048.
- Sorkine-Hornung, Olga, and Michael Rabinovich. "Least-squares rigid motion using svd." Computing 1.1 (2017), http://igl.ethz.ch/projects/ARAP/svd_rot.pdf
- 3D Kinematics, https://github.com/wojtin/3D-Transformation-Matrix-Calculator/blob/master/References/3dkinematics.pdf
You may use this software under the Apache 2.0 License.